- @2503_93963656
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
最后给个实战建议:先用TD3算法快速验证(这算法比DDPG稳定),等效果稳定了再换SAC追求更好性能。实测在静态环境中,DDPG训练2万步能收敛,但在动态障碍物场景下,SAC的探索能力能快20%左右。先看个真实场景:TurtleBot在Gazebo迷宫里瞎转悠,激光雷达数据乱飘,这时候传统的路径规划算法可能得现场算个半死。说到SAC(软演员-评论家)算法,这货自带熵正则化,特别适合路径规划这种需要
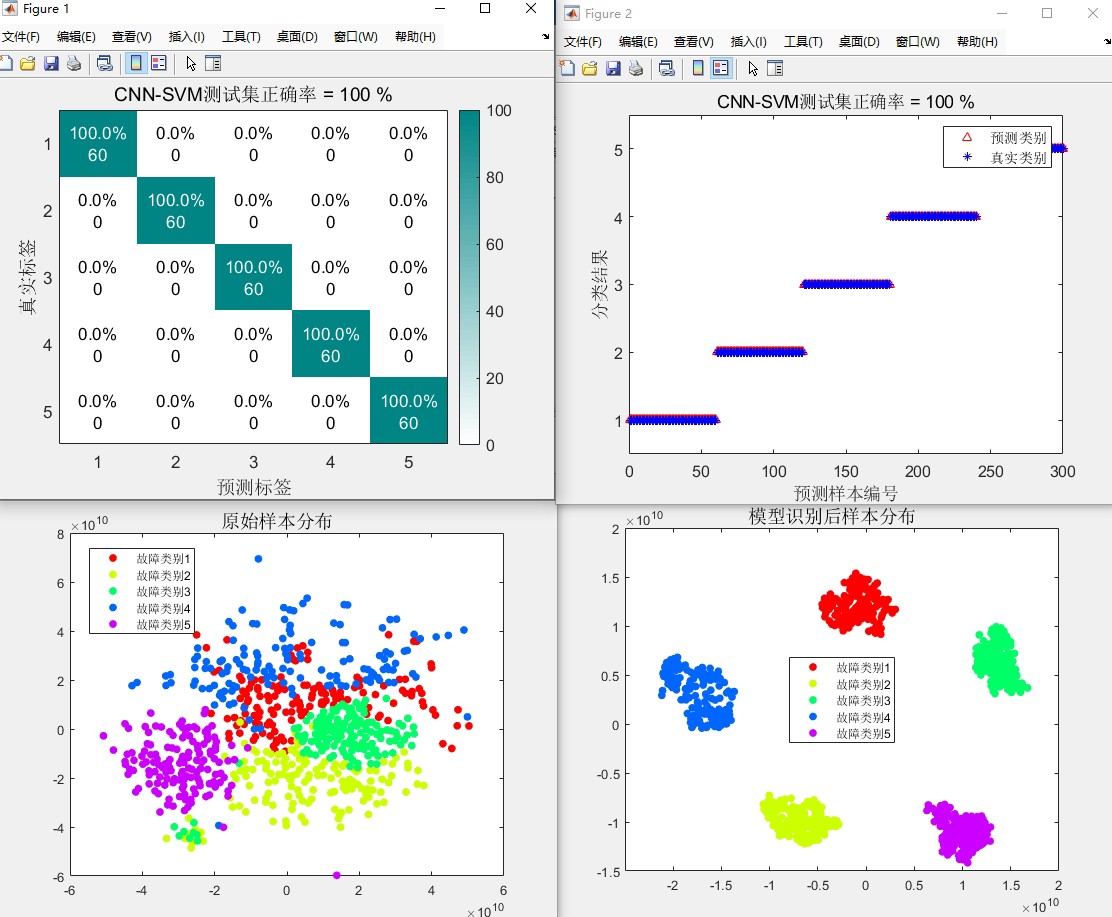
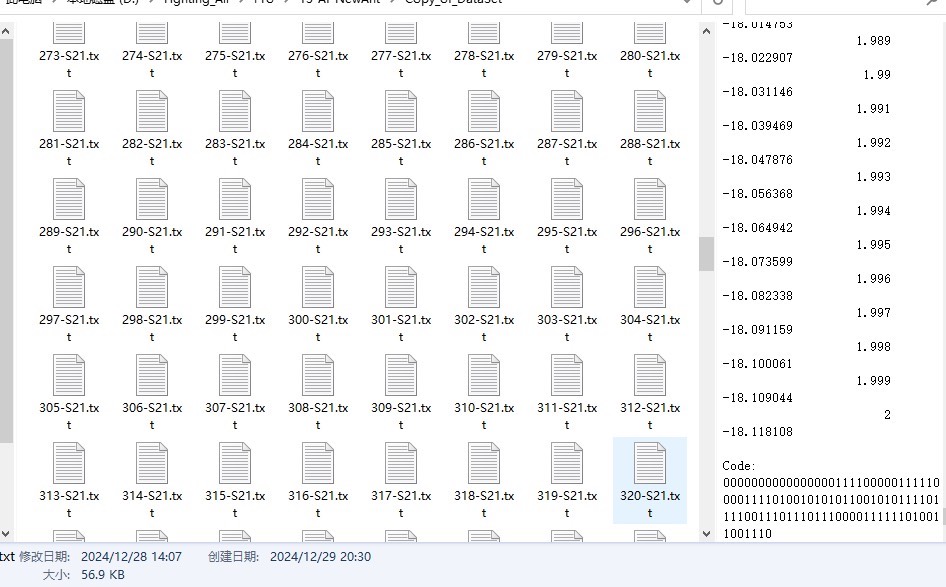
这套方法在东南大学数据集上实测达到98.7%的准确率,比纯SVM方案提升23%,比普通CNN高7%。这个玩法特别适合处理工业场景里振动信号时频特征不明显的头疼问题,咱们用东南大学轴承数据实操,手把手带你看看怎么把一维振动信号变成故障诊断的靠谱结论。保存时频图的时候转成彩色JPG,比直接用系数矩阵省内存,还能利用CNN对颜色特征的提取能力。当看到CNN特征在二维空间呈现明显聚类,而原始信号特征混作一
<bndbox></bndbox>
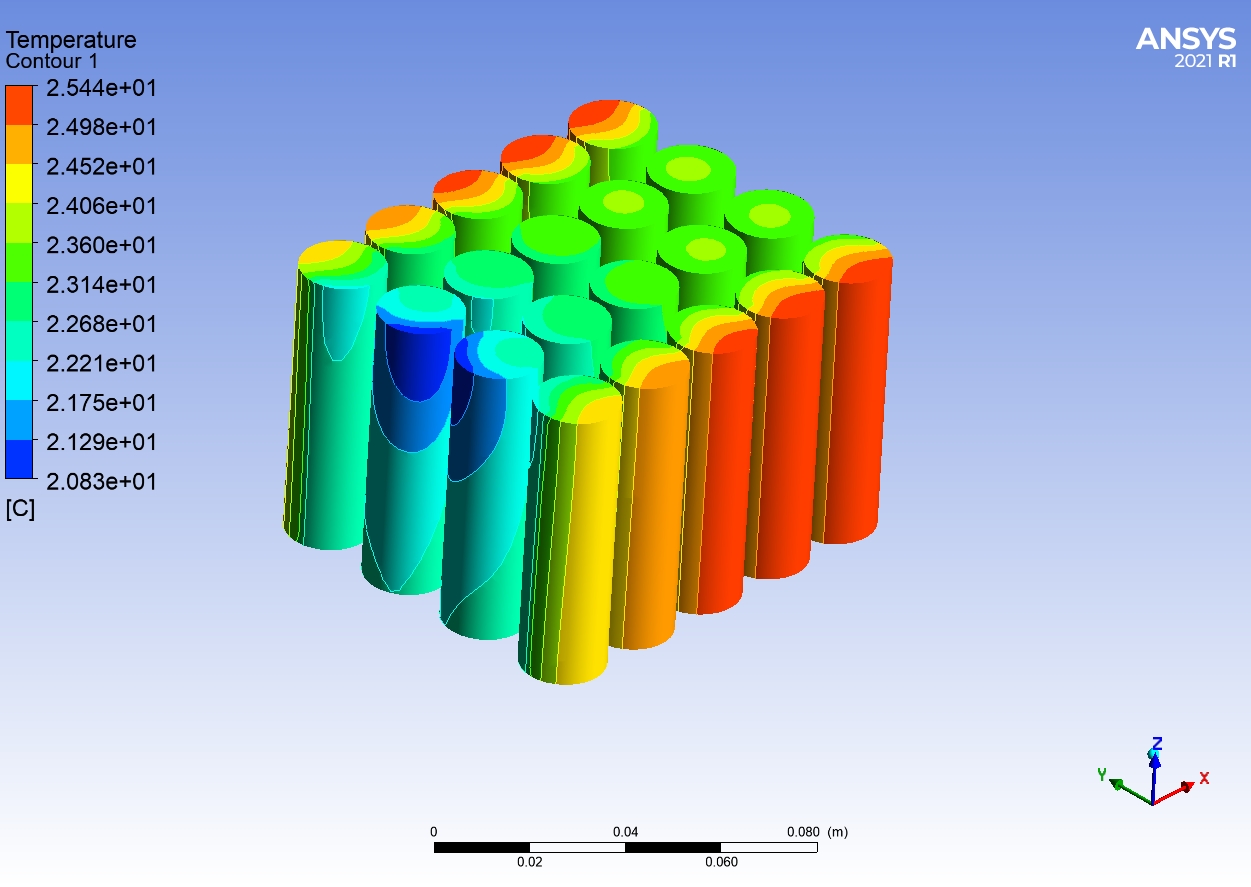
Fluent、starccm 电池、芯片等水冷风冷换热换热仿真在电子设备不断向小型化、高性能化发展的今天,电池和芯片的散热问题愈发关键。水冷和风冷作为常见的散热方式,借助 Fluent 和 StarCCM+ 等仿真软件来进行换热仿真分析,能帮助工程师们更好地优化散热设计。
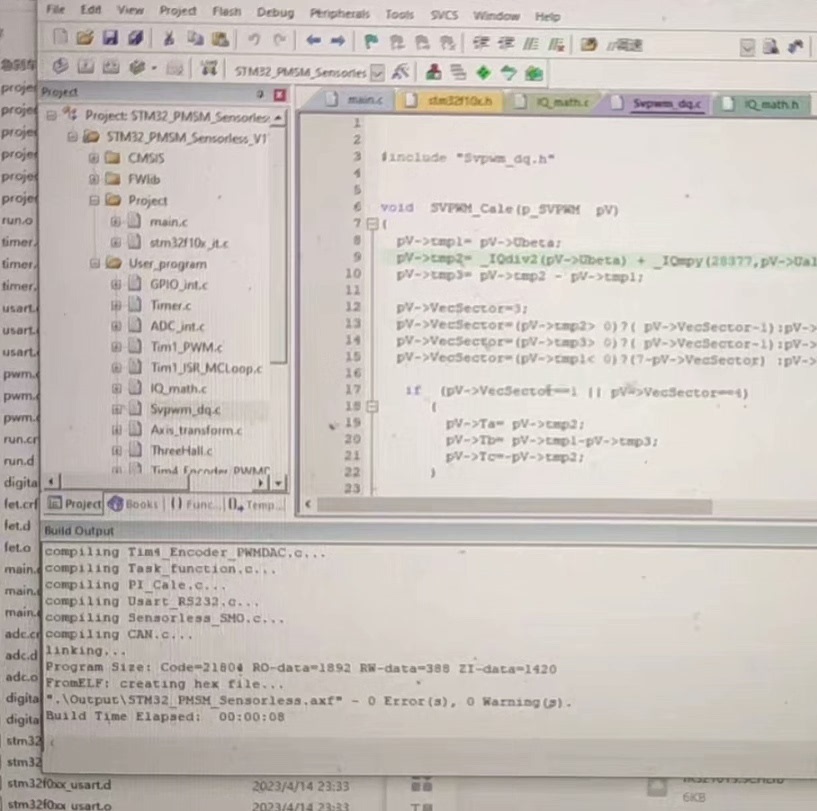
最近在STM32F103上捣鼓了个滑膜观测器的方案,实测电机启动那叫一个丝滑,连编码器都省了,关键代码全开源你敢信?这个0.57735其实是tan(30°)的近似值,用位运算代替浮点比较,在Cortex-M3内核上能省下30%的计算时间。最后吐槽下,开源包里原理图有个彩蛋——MOS驱动部分居然用TVS管代替常规的栅极电阻,实测开关损耗降低不说,还省了散热片的空间。sign函数产生的开关特性,相当于
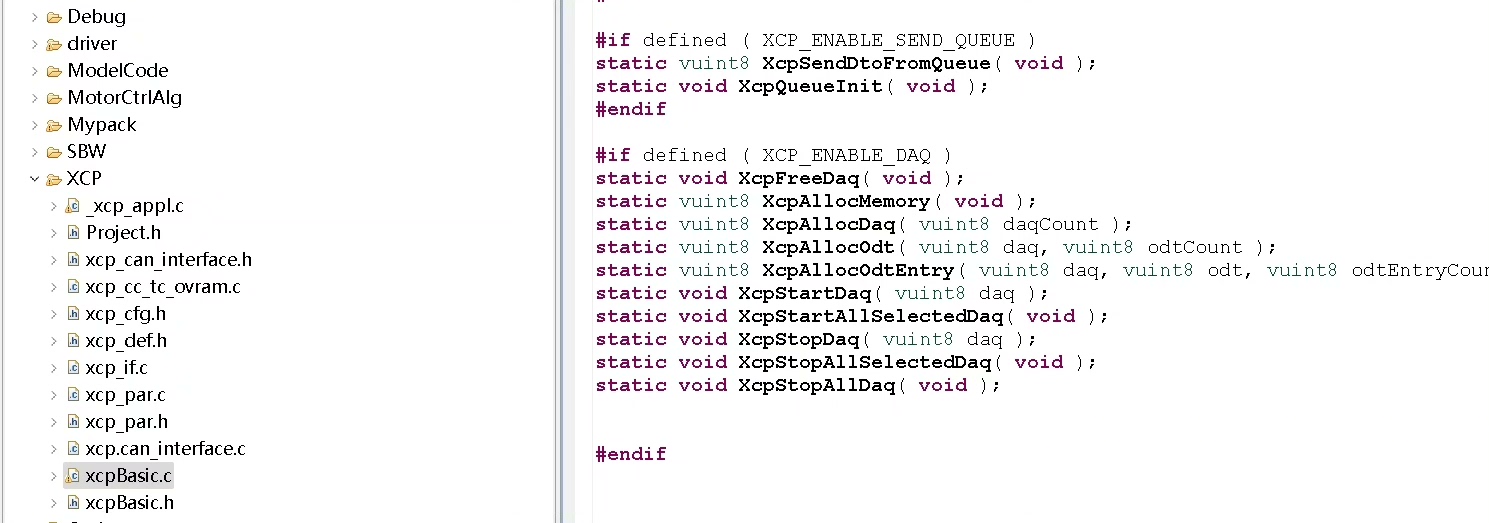
XCP标定协议栈源码,适合无autosar工具链,需要标定的场景,支持CAN,CANFD,最多支持64字节长度,可以提供适配服务,包括:协助客户完成ape上位机和下位机联调,下位适配不同的MCU型号,默认支持英飞凌TC3XX系列和NXP S32K1XX系列芯片。数据包处理模块支持动态分片,实测传64字节的标定参数时,底层会自动拆包发送。这个协议栈最大的优势是自带硬件抽象层。遇到最奇葩的案例是某客户
M00398-使用 Chan 法计算 TDOA 和计算 GDOP 的 MATLAB 仿真实现在定位技术的研究中,到达时间差(TDOA, Time Difference of Arrival)和几何精度稀释因子(GDOP, Geometric Dilution of Precision)是非常关键的概念。本文将介绍如何使用 Chan 法来计算 TDOA,并进一步实现 GDOP 的计算,同时通过 MA

核心思路就是用VBA脚本驱动CST建模,MATLAB负责数据搬运和暴算。搞天线设计的朋友应该都懂,手动建模调参简直是精神折磨——尤其是超表面这种动辄几十个单元的结构,点鼠标点到腱鞘炎发作真不是开玩笑。跑完500组参数后,发现数据格式五花八门——有的仿真中途崩溃生成半截文件,有的单位混用GHz和Hz。重点在For循环结构——别直接写死坐标,用lambda参数控制间距,后期改频率不用重写代码。接cst
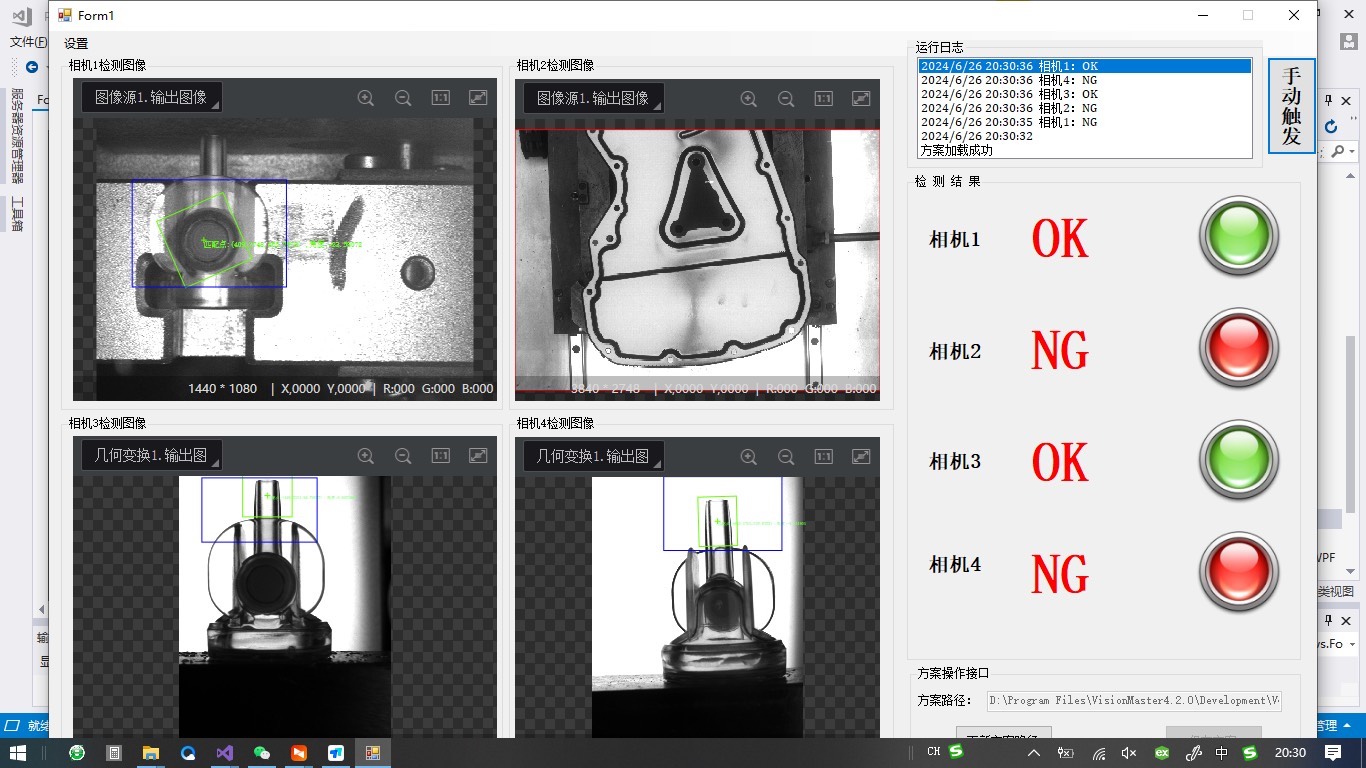
整套系统跑下来最大的体会是:机器视觉项目不是简单的算法堆砌,线程调度、资源管理、异常处理这些"脏活累活"往往决定着项目的成败。当四个相机的指示灯规律闪烁,检测结果通过红色绿色信号灯交替呈现时,这种工业自动化特有的节奏感,或许就是工程师的浪漫吧。最近在智能质检项目中遇到四个海康工业相机并行采集的需求,整套系统采用C#搭建,既要保证实时性又要处理复杂的图像分析任务。通讯模块需要对接PLC和MES系统,
整个系统跑下来,发现三个性能瓶颈:倾斜矫正的霍夫变换耗时、垂直投影的参数调优、模板匹配的速度。附带的PPT里详细列出了各模块的时间复杂度分析,实际部署时可以考虑用C++重写核心算法。今天咱们直接上干货,聊一个基于MATLAB实现的车牌识别系统。这套系统包含四个核心模块:预处理、倾斜矫正、字符分割和字符识别,咱们边看代码边分析实现逻辑。matlab车牌识别系统,有图像预处理模块,图像倾斜矫正模块,图