- @2501_93693767
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
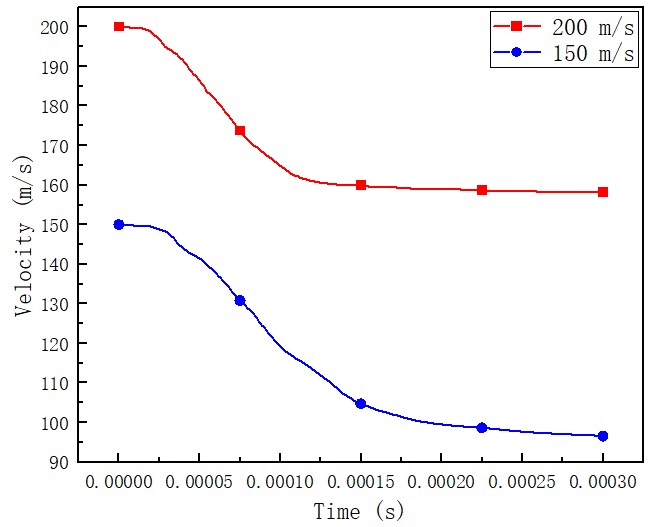
参考文献里那几篇SCI论文不是摆设,特别是那篇《Composites Part B》的刚度折减模型,简直就是VUMAT开发的参考答案。先看这个案例的硬核配置:三维Hashin+Puck失效准则搭配线性刚度折减,相当于给复合材料装了个"损伤进度条"。记住:仿真不是玄学,多撞几次南墙(字面意思的撞击仿真),就能摸透复合材料的失效套路。1,vumat子程序开发,简单易学,适合初学者;3,可输出靶板应力,
跟踪误差定义:设\(x_d\)为系统期望输出(如参考轨迹),定义跟踪误差e为实际输出与期望输出的差值:\(e = x - x_d\)误差导数计算:对误差e求时间导数,结合状态方程可得误差动态特性:\(\dot{e} = \dot{x} - \dot{x}_d\),代入\(\dot{x} = v\),进一步得到:\(\dot{e} = v - \dot{x}_d\)预设性能约束条件。
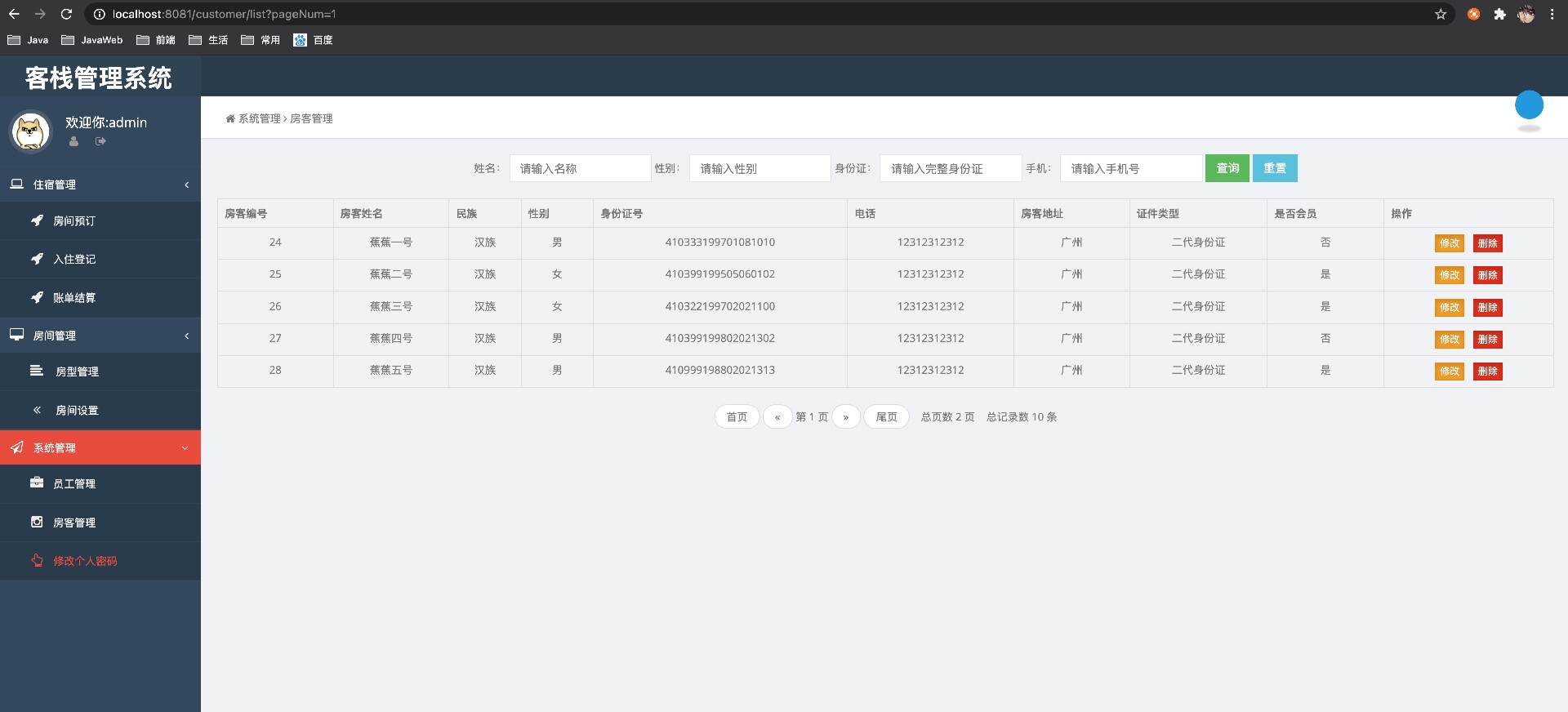
登录模块的安全配置容易踩坑。房间预订界面实现客户添加其客户信息、身份证号、证件类型、出生日期、手机号、地址、预定时间、预定房间的类型、是否是会员等信息的添加和重置功能。房间管理是管理员对房间类型和状态进行添加操作,查询房型编号、客型名称、押金、床位数、房间数、可用数、预定数、入住数进行统计分析。入住登记信息界面实现对房间预定时,记入的客户填写的记录,管理员可进行搜索、查看、核实、删除客房状态和客户
即时通讯搭建,包含安卓,iOS,PC,Java后端 ,承接各 种项目的定制和二次开发以及搭建。「即时通讯系统这玩意儿,真不是调几个API就能搞定的」——这是上个月帮客户重构IM系统时,技术合伙人老张在会议室里说的原话。别看市面上现成的IM框架满天飞,实际落地时客户端适配、消息同步、扩展开发这些坑,没踩过的根本不知道水多深。
别问为啥收费,你试试通宵帮人配环境就懂了——时间才是最贵的成本。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。这个框架的优点就是依赖中间件比较少,部署
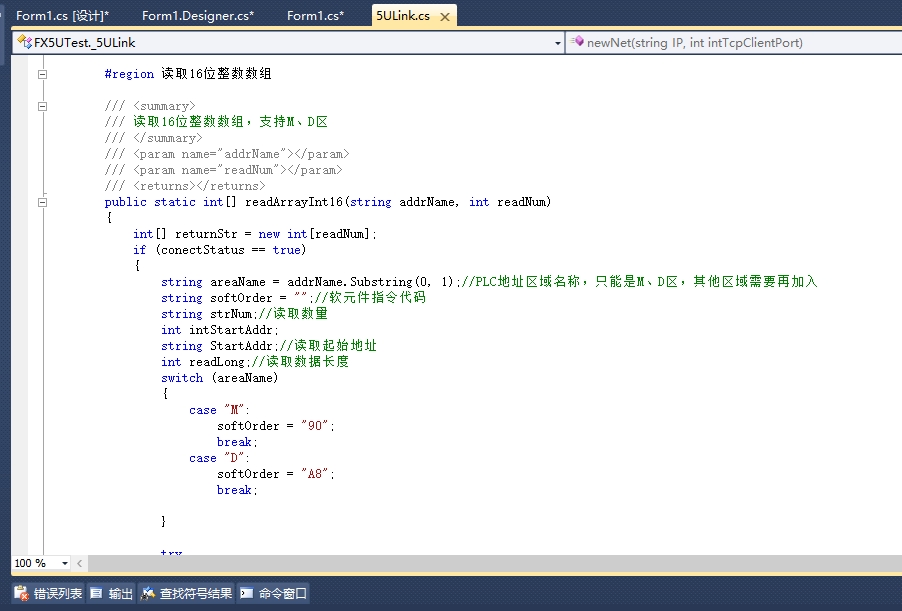
本中间件以"极简、可靠、易维护"为目标,把三菱 3E 帧协议细节封装在底层,让开发者专注于业务逻辑。全部源码自主可控,可无依赖嵌入任何 .NET 项目,是替代重型商业 SDK、快速搭建数据采集系统的理想选择。
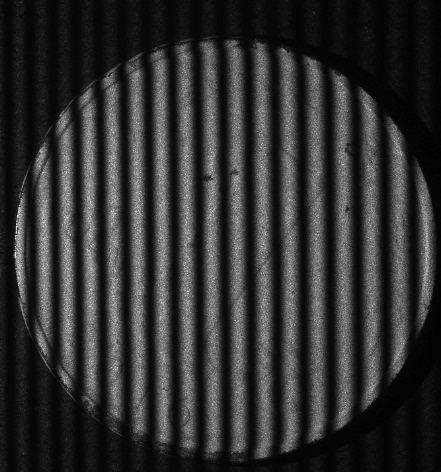
它在一次贴合之后、出货之前,用3套相机(RCAM / LED / CHECK)对LED-透镜组件进行两次拍照、一次复检,把偏移量、角度、OK/NG结果实时送给PLC,同时向上游MES(苹果PDCA、捷普OEE)上报数据。整套代码采用“单例+配置驱动+事件日志+状态机”的架构,把运动控制、视觉算法、网络协议、用户交互四层完全解耦,方便二次开发或移植到任意三相机+PLC场景。它不仅解决LED-透镜复检

双目结构就像我们人类的两只眼睛,通过视差来感知深度,而单目结构光则是通过投射特定的光模式,再根据变形来推算深度。总的来说,双目结构和单目结构光的三维建模各有优势,而C++、Python和Matlab在不同场景下也各有千秋。选择哪种方法,还得看具体的需求和开发环境。虽然Matlab的GPU加速不如C++和Python灵活,但在某些特定领域,它依然是一个强大的工具。C++在处理大规模数据时,性能优势明
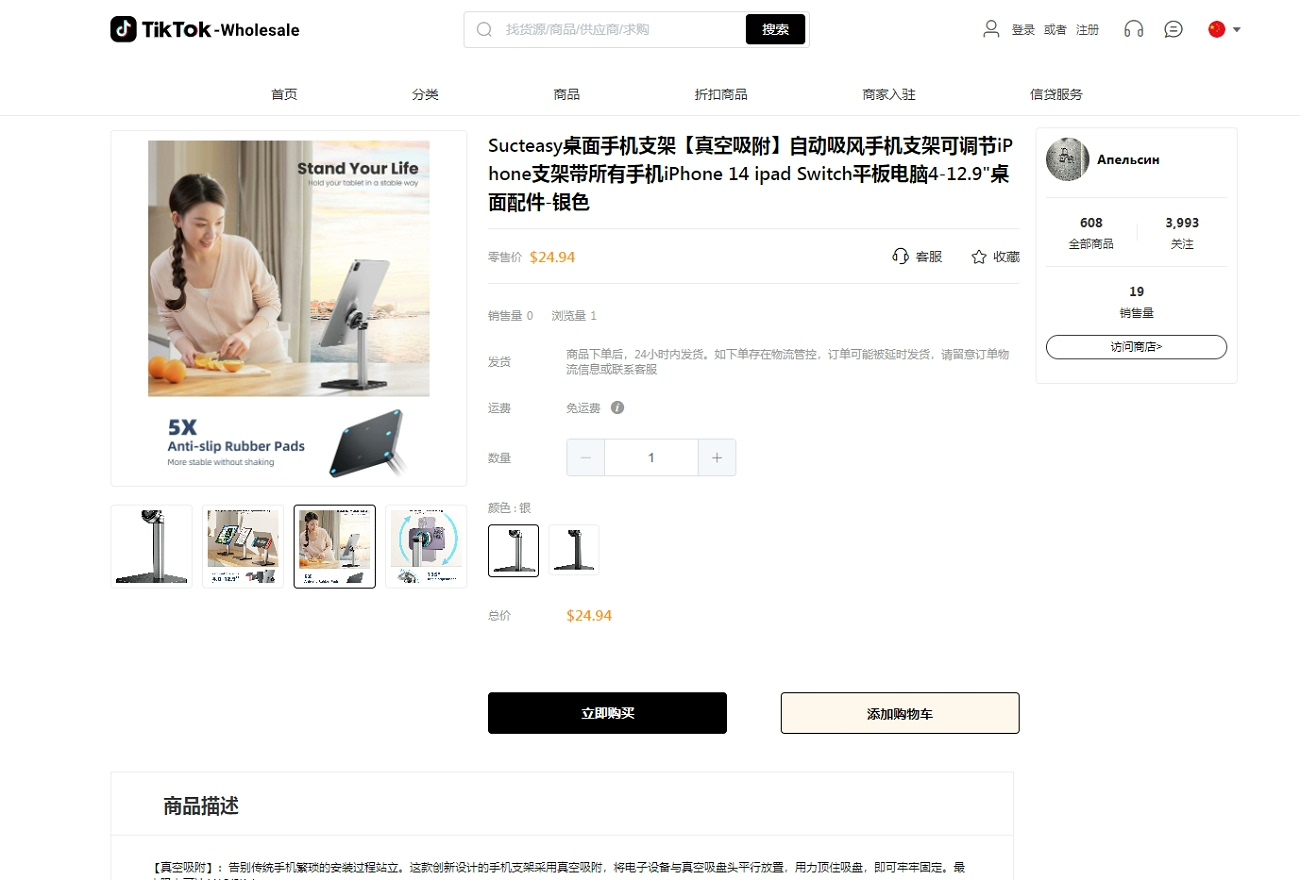
多语言支持:拥有二十一种语言,这意味着可以轻松开拓很多国家的市场。不管是欧洲、亚洲还是美洲的消费者,都能无障碍购物,极大地拓展了业务覆盖范围。商家入驻与多店铺:支持商家入驻,构建多店铺模式。这就好比搭建了一个线上的商业综合体,众多商家可以在你的平台上开店,丰富商品种类,提升平台吸引力。货币切换:支持美元 USD 或越南盾 VND 等货币切换,充分考虑了不同国家的货币使用习惯,方便了全球各地消费者的
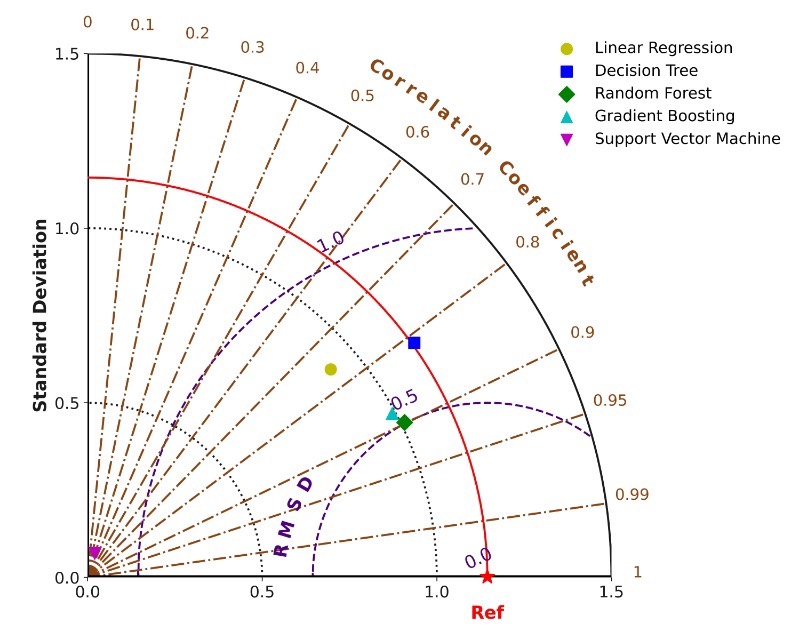
泰勒图以一种简洁的方式将多个数据集的标准差、相关性以及与参考数据集的 RMS(均方根误差)展示在一个极坐标图中。它能让我们快速了解不同模型与参考数据的接近程度,以及各个模型之间的差异。通过上面的代码,我们成功用 Python 绘制出了高逼格的泰勒图,实现了多模型对比可视化。泰勒图能帮助我们从整体上把握不同模型的特性和差异,在模型评估和选择时提供有力的可视化支持。大家可以根据实际需求,替换真实的数据