- @2500_94317614
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
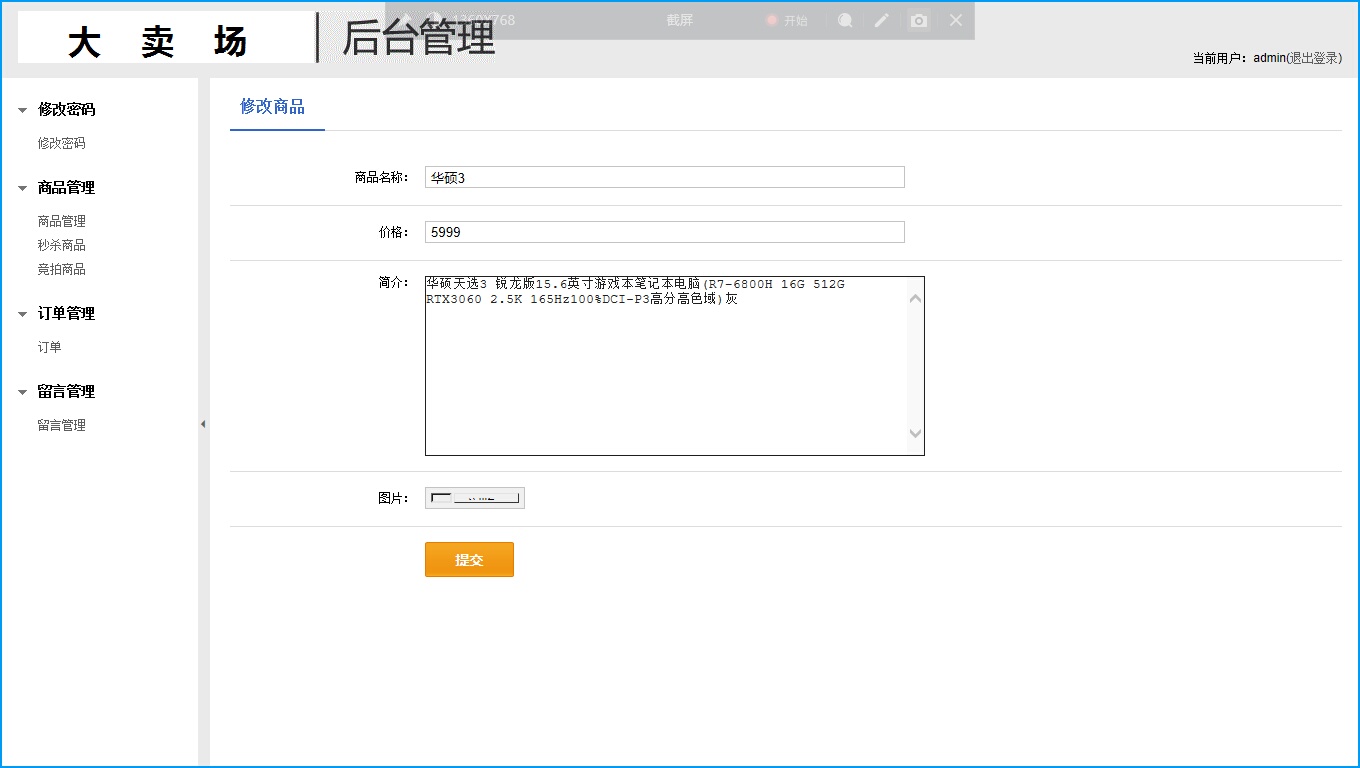
这个商城项目虽然用了传统的SSH框架,但包含了电商系统常见的核心模块。一个完整的电脑商城系统对Java初学者来说是个不错的练手项目。今天咱们聊聊基于SSH框架实现的系统,这个项目最有趣的地方在于它把Struts2的页面跳转、Spring的依赖注入和Hibernate的ORM特性玩得挺溜。注意这用的是Action级别的成员变量,配合Struts2的Session机制,实际开发要考虑线程安全问题。包含
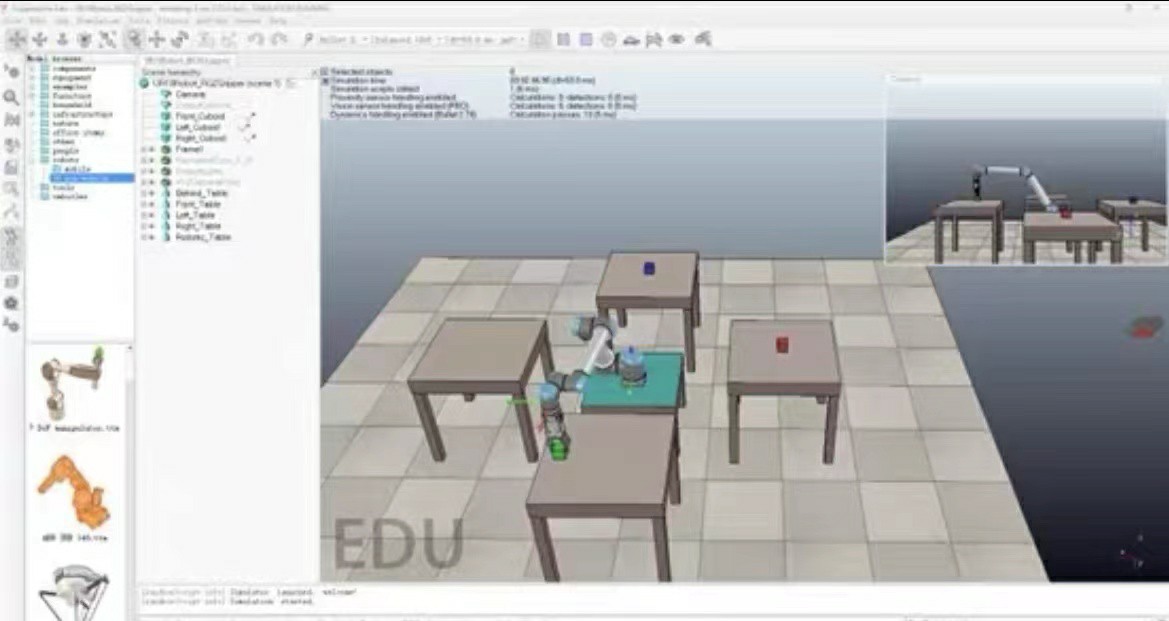
最近在折腾UR5协作机器人抓取仿真,发现用V-REP(现在叫CoppeliaSim)搭场景,配合MATLAB做算法验证真是效率神器。这俩工具一个擅长物理仿真,一个精于数值计算,合体后能快速验证从轨迹规划到抓取控制的全流程。曾经在动力学仿真时发现关节抖动,把MATLAB控制频率从50Hz提到100Hz,同时在CoppeliaSim里把物理引擎从Bullet换成ODE,电机P增益从0.8调到1.2,瞬
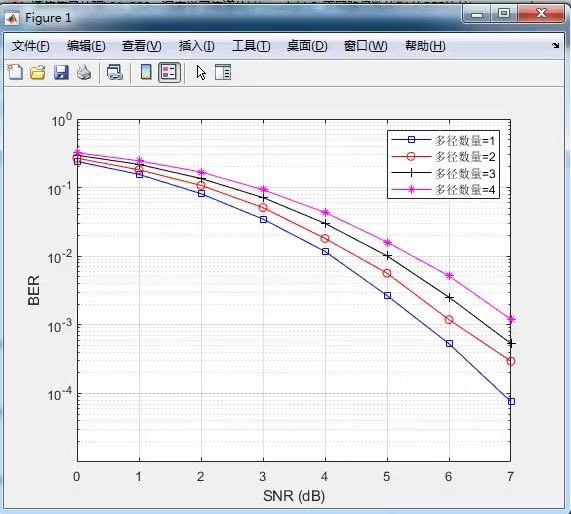
实测16QAM调制下,在EPA信道模型里,当导频间隔从4增大到12时,传统LS+MMSE的误码率从1e-3飙升到1e-1,而DL方案还能维持在5e-3左右。不过要注意训练时的SNR范围得覆盖实际场景,别在低噪环境下训练的网络拿到高噪声场景直接崩了。最后来个灵魂暴击——把传统方法和DL方案的BER曲线画一起,X轴用SNR,Y轴用对数坐标。传统做法要插导频做LS估计,咱们直接整活——把接收信号的幅度相
这个地址后面配置MAC的时候要特别注意,很多兄弟在这里栽跟头。项目开发用到了Dp83848这一个以太网芯片,本人发现其配置起来比较麻烦,所以整理了一份STM32F107单片机驱动Dp83848的程序代码例程,方便大家学习相关代码的配置。项目开发用到了Dp83848这一个以太网芯片,本人发现其配置起来比较麻烦,所以整理了一份STM32F107单片机驱动Dp83848的程序代码例程,方便大家学习相关代
找了好久的滑动窗口的程序都不符合我的要求,看到几篇机器学习的文章都是用滑动窗口生成的样本数据,最近同学给我搞了一个,现在分享给大家,程序为matlab编写,可以直接对原始采集数据生成所需样本,已经封装成了函数,一行代码就可实现对原始数据生成样本,亲测好用!最近在搞传感器数据处理时被滑动窗口折磨得够呛,网上那些通用代码要么处理速度慢,要么生成的样本格式对不上机器学习模型输入要求。滑动窗口虽小,却是打

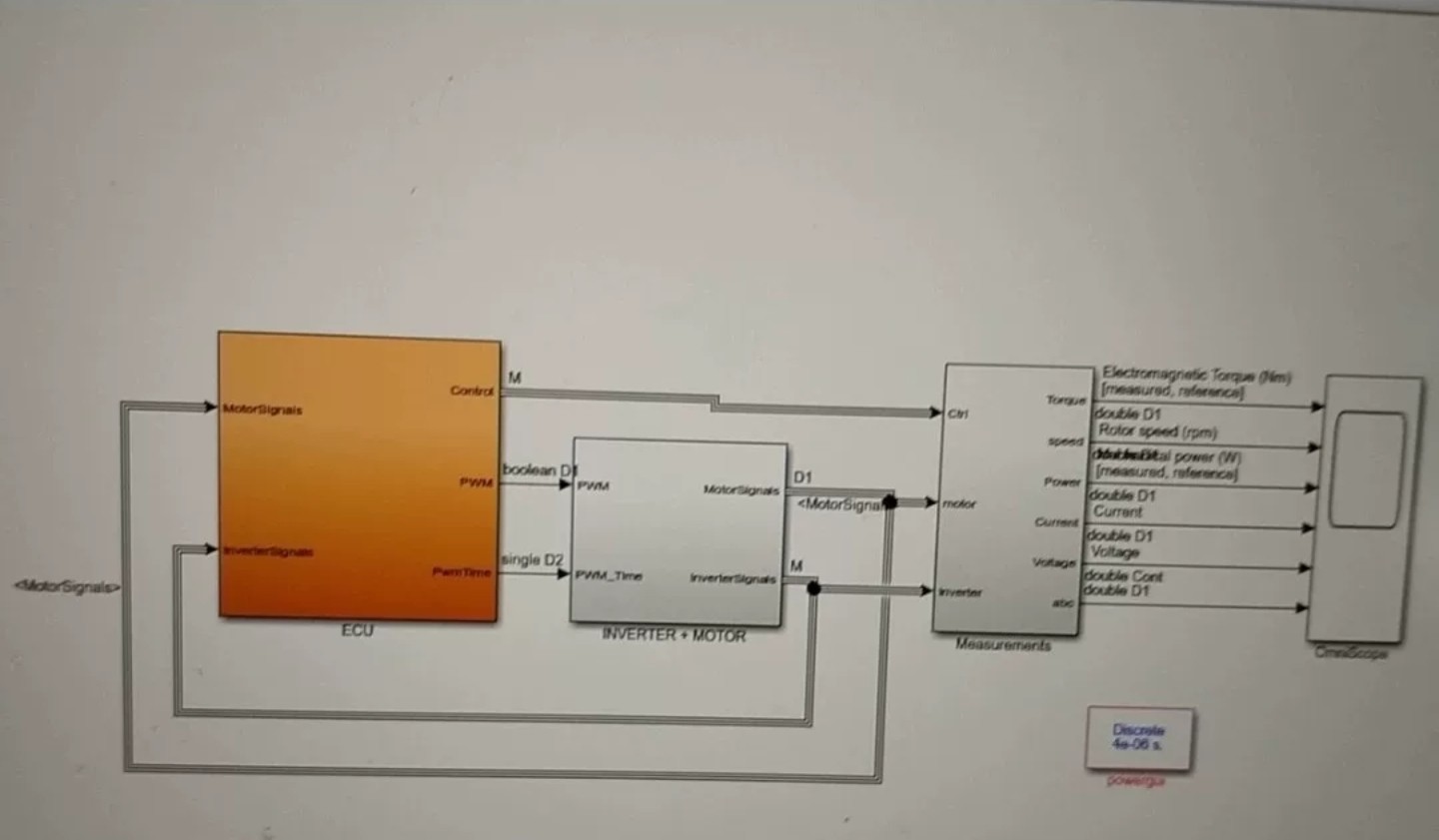
最近拆解博世电驱模型时发现个有意思的现象——无论是同步电机还是异步电机,在FOC控制下都能输出教科书级的相电流正弦波。博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形 博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形,自动计算弱磁模型调用各种脚本进行foc控制,正反转切换电流无波动。博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形 博世汽车电驱仿真模型,同步电机
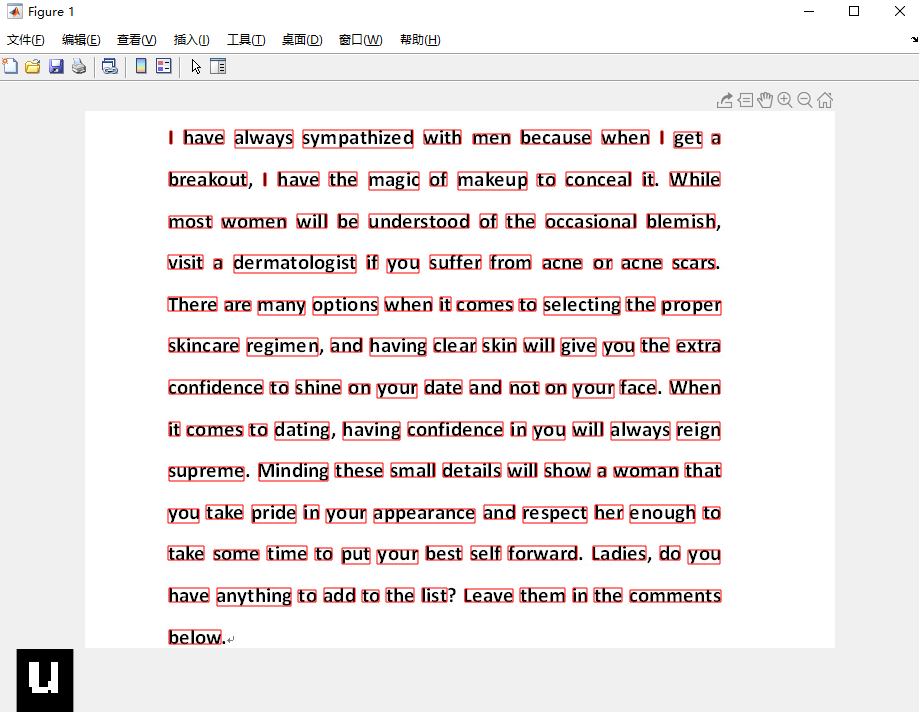
可以识别英文,当鼠标指在某个英文单词时,在坐下角会显示相关字符,原有62张图片,包括大小写A-Z和0-9用于匹配,具体可参照:https://blog.csdn.net/horseinch/article/details/51658428\\r。这种基于特征匹配的字符识别在一些简单场景下还是挺实用的,虽然现在深度学习在字符识别领域非常强大,但传统方法也有它的优势,比如简单易懂、计算量相对小一些等。
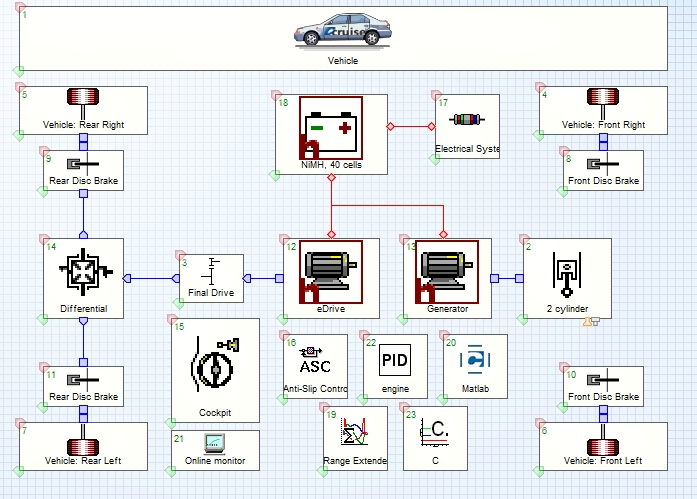
cruise软件模型,混动仿真模型,cruise与simulink联合仿真模型,Cruise混动仿真模型,混联混动汽车动力性经济性仿真在汽车行业向着绿色、高效迈进的征程中,混联混动汽车凭借其独特的动力架构,成为了研究与发展的热点。对这类汽车动力性和经济性的精准仿真,对于优化设计、提升性能至关重要。而Cruise软件模型以及Cruise与Simulink联合仿真模型,在这一领域发挥着关键作用。
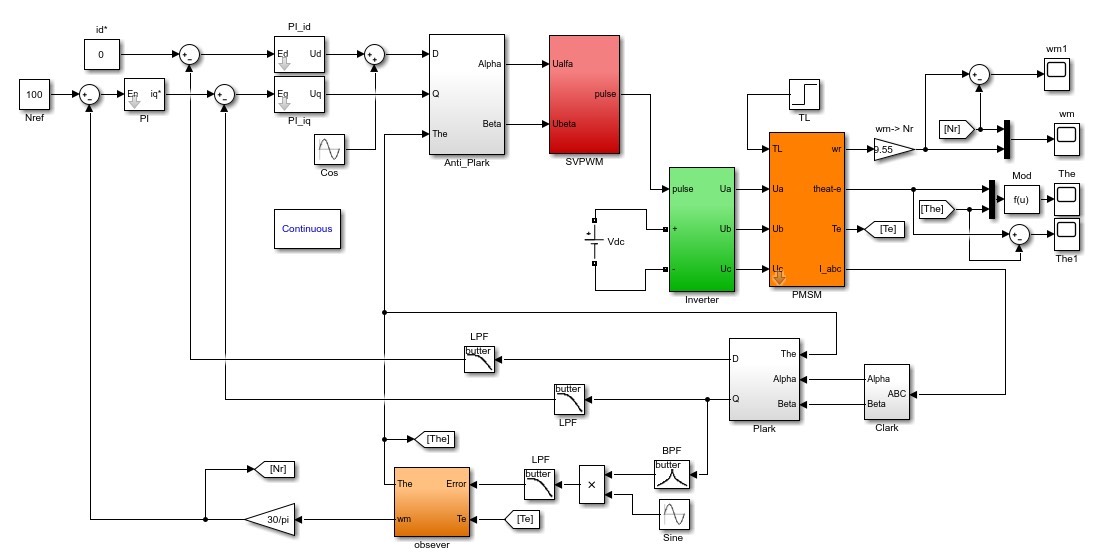
在Simulink里直接拽个Sine Wave模块,频率设个500Hz,幅度给0.2V足够。注意这里必须用旋转坐标系,别傻乎乎直接往三相电压里怼信号,回头位置估算直接翻车。锁相环别用默认参数,带宽设到20Hz左右,阻尼系数给0.7,这样收敛速度跟得上电机转速变化。注意这里没采用标准1/3系数,因为高频信号幅值本来就小,等幅值变换能让后面处理更直观。带通滤波器别用现成的模块,自己搭二阶巴特沃斯结构,
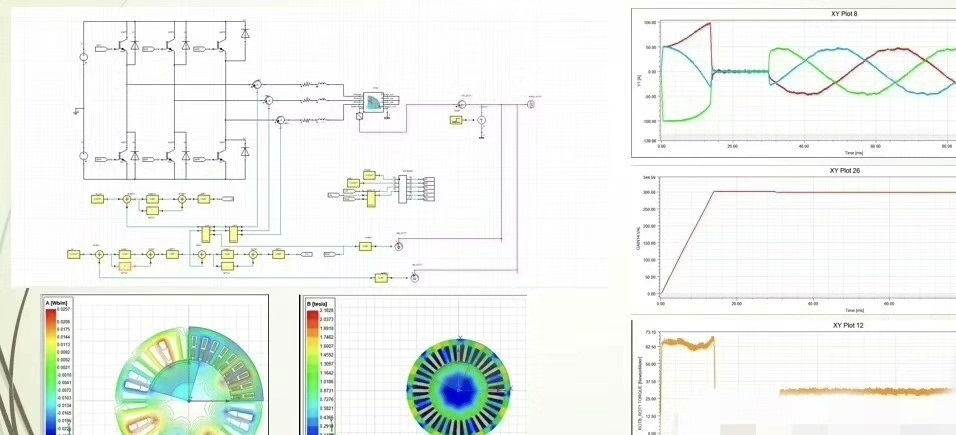
联合仿真最刺激的是启动瞬间。maxwell simplorer simulink 永磁同步电机矢量控制联合仿真,电机为分数槽绕组,使用pi控制SVPWM调制,修改文件路径后可使用,软件版本matlab 2017b, Maxwell electronics 2021b。maxwell simplorer simulink 永磁同步电机矢量控制联合仿真,电机为分数槽绕组,使用pi控制SVPWM调制,修