- @2401_86332611
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要: 本研究设计了一种基于ESP32单片机的低成本智能家居系统,采用四层架构实现设备联动控制。系统集成温湿度、人体红外等传感器,通过继电器、红外发射器等执行设备,支持手机APP远程控制与场景模式切换。测试显示,该系统响应时间≤1秒,能耗降低32%,报警准确率100%,成本仅为商用系统的1/6(450元)。用户满意度达92%,特别适合普通家庭智能化改造,具有显著节能、安全与性价比优势。(150字)
本研究设计了一套感应电机故障诊断系统,通过采集电流和振动信号,结合小波去噪、FFT和HHT算法提取特征参数,利用SVM模型实现故障分类。测试表明,系统对单一故障识别准确率≥95%,复合故障≥90%,能提前24-72小时预警,适应负载波动工况。系统采用模块化设计,可扩展至工业互联网平台,实现远程集中诊断。未来可集成微型传感器和边缘计算技术,推动诊断系统向智能化、轻量化发展,提升工业电机运维水平。
本文设计并实现了一款智能语音垃圾桶,解决传统垃圾桶手动操作不便、卫生隐患等问题。系统采用语音识别(LD3320)与红外感应(GP2Y0A21YK)双模式开盖,识别准确率≥96%,响应时间≤0.4s,支持60°-90°开盖角度调节。硬件基于STM32L4低功耗架构,配备2000mAh锂电池,续航达35天,运行噪音≤28dB。通过模块化控制逻辑实现延时关盖(3-10秒可调)、低电量提醒和故障防护功能。
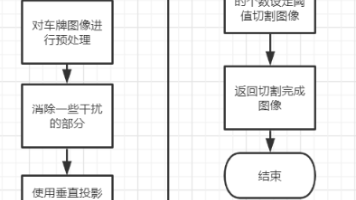
本文介绍了车牌识别系统中的关键技术流程,主要包括车牌定位、字符分割和字符识别三个核心环节。在车牌定位阶段,通过颜色特征(蓝底白字、绿底黑字等)和尺寸特征(长宽比、字符排列)进行识别,采用高斯滤波、灰度化和二值化等预处理方法。字符分割部分使用垂直投影法,通过分析黑白像素分布确定字符边界。最后采用支持向量机(SVM)进行字符识别,利用OpenCV提供的预训练模型实现高效分类。整个系统通过标准化处理流程
本文设计了一种基于STM32L431RCT6单片机的智能垃圾桶系统,通过模块化架构实现"感知-判定-执行-预警"闭环控制。系统采用红外传感器实现自动开盖,超声波传感器检测垃圾满溢状态,语音模块提供分类指引,并具备一键打包功能。测试表明,开盖响应时间≤0.5秒,高度检测误差±2cm,语音识别率≥92%,锂电池可续航15天。系统解决了传统垃圾桶卫生性差、管理不智能的问题,后续可增加
摘要: 本文设计了一款基于STC89C51单片机的智能分类垃圾桶系统,通过按键或语音识别垃圾类别(可回收/厨余/有害/其他),驱动对应舵机自动开合桶盖(响应延迟≤0.5秒),投放错误时触发声光告警。系统采用模块化设计,包含识别、控制、执行与告警模块,硬件成本低于150元,支持红外检测投放动作与异常处理。测试表明,语音识别准确率达95%,桶盖开合稳定。未来可扩展图像识别、云端数据统计等功能,提升智能
本文设计并实现了一套智能小区监控系统,采用"感知层-传输层-智能分析层-应用层"四层架构,集成AI视频分析、多传感融合和物联网联动技术。系统具备98.5%的人形/车辆识别准确率,支持入侵预警、烟火检测等10类异常行为识别,预警响应时间≤2.5s。实测显示,系统误报率仅0.8%,夜间监测清晰,电梯困人响应时间缩短至3分钟。部署后小区安防成本降低40%,居民安全感提升至92分。系统
摘要: 本研究设计了一种基于ESP32单片机的低成本智能家居系统,采用四层架构实现设备联动控制。系统集成温湿度、人体红外等传感器,通过继电器、红外发射器等执行设备,支持手机APP远程控制与场景模式切换。测试显示,该系统响应时间≤1秒,能耗降低32%,报警准确率100%,成本仅为商用系统的1/6(450元)。用户满意度达92%,特别适合普通家庭智能化改造,具有显著节能、安全与性价比优势。(150字)
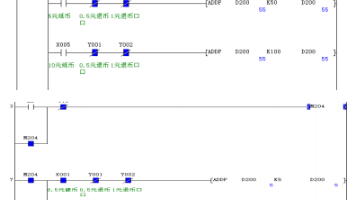
摘要:本研究设计了一种基于PLC的自动售货机控制程序,采用三菱FX1N系列PLC实现支付验证、货道控制、库存管理和故障处理功能。程序采用模块化设计,包括支付解析、货道控制、库存更新和故障处理四个核心模块,具备闭环校验机制和异常处理能力。测试表明,程序支付至出货响应时间≤0.8秒,出货准确率达100%,能有效处理卡货等异常情况。相比传统固化程序,该设计显著提升了扩展性和稳定性,适用于饮料零食类自动售
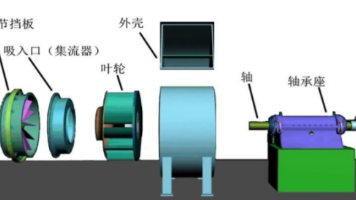
本文介绍了离心风机的设计方案,主要包括工作原理、技术参数确定和强度校核三部分。首先阐述了离心风机的结构组成和工作原理,通过电机驱动叶轮高速旋转实现空气交换。其次根据环境需求确定了风机流量、全压等参数,并进行了电机选型计算。最后对主轴进行了强度校核,计算了传动主轴承受的弯矩和转矩。该设计适用于井下、矿洞等空气不流通场所的通风需求。