- @2303_80799640
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
术语英文定义正向运动学根据机械臂各关节角度,计算末端执行器在空间中的位置与姿态。逆向运动学根据末端执行器的目标位置和姿态,求解各关节的驱动角度。URDF统一机器人描述格式,用于描述机器人模型的连杆、关节和运动学属性。ROS2第二代机器人操作系统,提供分布式通信、硬件抽象和工具链支持。KDL运动学与动力学库,提供机器人的运动学正反解算法实现。透视变换将图像投影到一个新的视平面,用于将倾斜拍摄的图像校
术语英文定义正向运动学根据机械臂各关节角度,计算末端执行器在空间中的位置与姿态。逆向运动学根据末端执行器的目标位置和姿态,求解各关节的驱动角度。URDF统一机器人描述格式,用于描述机器人模型的连杆、关节和运动学属性。ROS2第二代机器人操作系统,提供分布式通信、硬件抽象和工具链支持。KDL运动学与动力学库,提供机器人的运动学正反解算法实现。透视变换将图像投影到一个新的视平面,用于将倾斜拍摄的图像校
这是一个用深度学习做油井产量时序预测的项目,目标是又快又准地预判产能,少跑 CMG 模拟。
本文介绍了基于小熊派BearPi-HMNano开发板的智慧农业监控系统硬件代码实现。系统通过E53_IA1扩展板驱动温湿度、光照、CO2等传感器,控制水泵、风扇等执行器,实现自动补光、灌溉和通风功能。主程序iot_cloud_oc_sample.c负责初始化硬件、连接WiFi、创建数据采集任务,并与华为云IoT平台通过MQTT协议通信。系统每5-10秒采集一次环境数据,执行自动控制逻辑后上报云端,
本文介绍了基于小熊派BearPi-HMNano开发板的智慧农业监控系统硬件代码实现。系统通过E53_IA1扩展板驱动温湿度、光照、CO2等传感器,控制水泵、风扇等执行器,实现自动补光、灌溉和通风功能。主程序iot_cloud_oc_sample.c负责初始化硬件、连接WiFi、创建数据采集任务,并与华为云IoT平台通过MQTT协议通信。系统每5-10秒采集一次环境数据,执行自动控制逻辑后上报云端,
本篇文章介绍了 BearPi-Agriculture-APP 的设计与实现背景、核心功能、技术选型与关键模块实现思路。该项目基于 OpenHarmony 与 ArkTS/ArkUI,面向温室与小型农业场景,实现环境监测、设备控制与智能灌溉,是一个可落地的物联网应用范例。
基于OpenHarmony的智慧农业控制系统采用“端—边—云”协同架构,实现温室环境的远程监测与智能控制。硬件以小熊派BearPi-HM Nano为核心,集成温湿度、光照、CO₂等传感器及水泵、LED等执行器。软件基于ArkTS+ArkUI开发,采用MVVM架构,通过MQTT协议接入华为云IoT平台,实现6项环境参数实时采集、智能灌溉、PWM自动补光、阈值预警及扩展设备接入等功能。实测数据刷新延迟
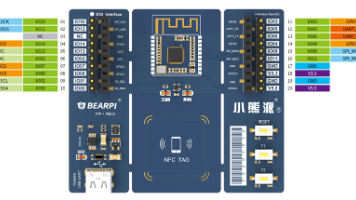
本文介绍了智能温室控制系统的硬件配置与接线方案。系统采用小熊派开发板作为主控单元,集成SHT30温湿度传感器、BH1750光照传感器和JW01-CO2二氧化碳传感器构成环境感知层。执行层包含LED补光灯、微型水泵、电磁水阀、直流风扇和SG90舵机等设备,通过PWM和继电器控制。硬件接线详细说明了各传感器的I2C接口连接方式(SHT30与BH1750共用总线)和执行器的控制逻辑(低电平触发),特别强