- @2302_80181478
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文总结了基于大语言模型的情绪互动机器人项目中Milk-VDuoS执行层的开发工作。该系统通过Web层接收用户情绪输入,经云端分析后生成动作序列,由执行层完成硬件控制。作者负责搭建嵌入式开发环境,实现串口通信、动作调度、云端轮询通信等功能,并设计状态机和安全机制提升系统可靠性。最终完成了包含11个新动作组、支持序列化行为控制的执行系统,成功将AI情绪理解转化为实体机器人动作,为智能交互提供了关键支
本文介绍了在Milk-VDuoS机器人端开发中引入的两个核心模块:动作调度状态机和动作安全校验机制。作者通过设计状态枚举(IDLE/POLLING/RUNNING等状态)和动作元数据表(包含风险等级、执行时长等属性),将原本简单的动作执行流程升级为具备安全校验能力的闭环系统。系统实现了云端指令轮询、动作序列规范化(自动补站立动作)、风险分级控制(限制高风险动作数量)、串口互斥执行和异常恢复机制,并
本文总结了基于大语言模型的情绪互动机器人项目中Milk-VDuoS执行层的开发工作。该系统通过Web层接收用户情绪输入,经云端分析后生成动作序列,由执行层完成硬件控制。作者负责搭建嵌入式开发环境,实现串口通信、动作调度、云端轮询通信等功能,并设计状态机和安全机制提升系统可靠性。最终完成了包含11个新动作组、支持序列化行为控制的执行系统,成功将AI情绪理解转化为实体机器人动作,为智能交互提供了关键支
本文总结了基于大语言模型的情绪互动机器人项目中Milk-VDuoS执行层的开发工作。该系统通过Web层接收用户情绪输入,经云端分析后生成动作序列,由执行层完成硬件控制。作者负责搭建嵌入式开发环境,实现串口通信、动作调度、云端轮询通信等功能,并设计状态机和安全机制提升系统可靠性。最终完成了包含11个新动作组、支持序列化行为控制的执行系统,成功将AI情绪理解转化为实体机器人动作,为智能交互提供了关键支
本文介绍了Milk-VDuoS机器人端执行控制系统的优化设计,主要包含两个核心模块: 可靠通信与执行反馈机制 设计了CloudClient类实现网络异常处理、动态轮询间隔调整和ACK重试 通过NetworkSafetyManager实现分级离线保护策略(3次失败降频、5次站立保护、10次离线模式) 采用ExecutionReport生成包含动作序列、执行状态、耗时等信息的完整执行报告 情绪强度速度
please wait, loading……
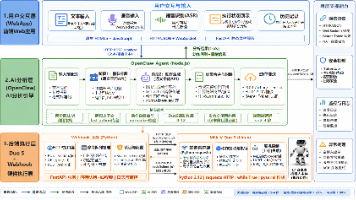
本项目构建了一套基于 LLM 的情绪驱动机器人交互系统,整体采用事件驱动架构,分为三层:Web 端通过 HTTP POST 将自然语言文本发送至 Agent 服务;Agent 端(OpenClaw)调用大语言模型完成 NLU(自然语言理解)并将结果序列化为动作指令,推入内存队列;机器人端(DuoS)以 2 秒为间隔轮询 Webhook Server 的 /poll/{client_id} 端点,取
本项目构建了一套基于 LLM 的情绪驱动机器人交互系统,整体采用事件驱动架构,分为三层:Web 端通过 HTTP POST 将自然语言文本发送至 Agent 服务;Agent 端(OpenClaw)调用大语言模型完成 NLU(自然语言理解)并将结果序列化为动作指令,推入内存队列;机器人端(DuoS)以 2 秒为间隔轮询 Webhook Server 的 /poll/{client_id} 端点,取
本项目构建了一套基于 LLM 的情绪驱动机器人交互系统,整体采用事件驱动架构,分为三层:Web 端通过 HTTP POST 将自然语言文本发送至 Agent 服务;Agent 端(OpenClaw)调用大语言模型完成 NLU(自然语言理解)并将结果序列化为动作指令,推入内存队列;机器人端(DuoS)以 2 秒为间隔轮询 Webhook Server 的 /poll/{client_id} 端点,取
本周进行Milk-V Duo 端基本开发环境搭建,包括配置duo-buildroot-sdk,文件拷贝,TF卡烧录,安装并验证Milk-V DuoS内的Python环境,首次尝试连接Milkv Duo S开发板,获取Milkv Duo开发板的IP地址,安装可视化编程环境。