10分钟上手YOLOv11:最强姿态估计模型来了,代码开源,效果炸裂!
【10分钟玩转YOLOv11实时姿态估计】🚀 YOLOv11作为YOLO家族最新成员,在速度、精度和易用性上全面升级,尤其适用于姿态估计等复杂视觉任务。本文带您快速掌握: 1️⃣ 核心概念:姿态估计即识别人体17个关键点(如关节部位)并连接成数字骨架,是智能健身、体感游戏等应用的基础。 2️⃣ 技术优势: 超轻量级(最小仅2.9M参数) 极速推理(GPU仅1.7ms) 高精度(COCO mAP@
🚀 引言
作为YOLO家族的最新成员,YOLOv11不仅在速度和精度上再次突破,更重要的是,它让包括姿态估计在内的复杂视觉任务变得前所未有的简单。今天,我们就用10分钟时间,手把手带你玩转YOLOv11的实时姿态估计功能,体验一把最前沿的AI技术!
无论你是AI新手还是资深开发者,这篇教程都能让你快速上手,立即看到效果。准备好了吗?让我们开始这场AI视觉的奇妙之旅!
🤔 什么是姿态估计?3分钟让你秒懂
想象一下,你希望电脑能看懂一个人是在跑步、跳跃还是在挥手。要实现这一点,电脑首先需要识别人体的关键"节点"——比如头部、肩膀、手肘、膝盖和脚踝等,然后将这些点连接起来,形成一个"数字骨架"。
这个识别并连接人体关键点的过程,就是姿态估计(Pose Estimation)。它是实现以下酷炫应用的基础:
• 🏃♂️ 智能健身:实时纠正运动姿势
• 🎮 体感游戏:无需手柄的沉浸式体验
• 🏭 工业安全:监控工人操作规范性
• 📱 AR滤镜:精准的人体特效追踪
简单来说,姿态估计让机器拥有了"看懂人体动作"的超能力!
⚡ YOLOv11:更快、更强、更易用
YOLOv11继承了YOLO家族"快准狠"的优良传统,并通过全新优化的模型架构,实现了:
🎯 核心优势
• 参数更少:模型体积显著减小,部署更轻松
• 速度更快:推理速度大幅提升,实时性更强
• 精度更高:在COCO数据集上的mAP指标再创新高
• 易用性强:开箱即用的预训练模型,零门槛上手
📊 性能数据
以YOLOv11n-pose为例:
• mAP@50-95: 50.0%
• 推理速度: CPU上52.4ms,GPU上仅1.7ms
• 模型参数: 2.9M(超轻量级)
这意味着,我们可以在普通的个人电脑甚至手机上,流畅地运行复杂的姿态估计任务!
🛠️ 10分钟实战:手把手跑通YOLOv11姿态估计
理论不多说,我们直接上实操!三步搞定,保证你跟得上。
第一步:环境搭建 (2分钟)
首先,确保你的电脑安装了Python(推荐Python 3.8及以上版本)。然后,打开终端,只需一行命令:
pip install ultralytics没错,就是这么简单!ultralytics这个包已经为你准备好了一切,包括PyTorch等依赖。安装过程会自动进行,喝杯咖啡等待即可。☕
第二步:准备素材 (1分钟)
找一张包含人物的照片(比如运动照、生活照),或者一段有人物活动的短视频。将其保存在你方便查找的文件夹中。
💡 小贴士:如果没有合适的素材,可以直接使用网络图片URL,YOLOv11支持在线处理!
第三步:敲代码,见证奇迹 (7分钟)
这是最激动人心的部分!你既可以用命令行偷懒,也可以用Python脚本灵活控制。
方法一:命令行一键出结果(最简单)
如果你不想写任何代码,直接在终端里输入:
yolo predict model=yolo11n-pose.pt source='你的图片路径.jpg'参数说明:
• model=yolo11n-pose.pt:使用YOLOv11的nano姿态估计模型(最轻量)
• source='你的图片路径.jpg':替换成你的图片文件路径
• 支持视频文件或摄像头(source=0代表电脑摄像头)
第一次运行时,程序会自动下载模型文件,稍等片刻即可。
方法二:Python脚本(更灵活)
创建一个Python文件(例如pose_detection.py),复制以下代码:
from ultralytics import YOLO
# 加载预训练的YOLOv11姿态估计模型
model = YOLO("yolo11n-pose.pt")
# 指定你的图片或视频源
source = "你的图片路径.jpg"# 也可以是视频文件或摄像头ID
# 执行预测
results = model(source)
# 显示结果(可选)
for result in results:
# 获取关键点坐标
keypoints = result.keypoints.xy # x, y坐标
keypoints_norm = result.keypoints.xyn # 归一化坐标
# 保存结果图片
result.save(filename="result_pose.jpg")
# 打印检测到的人数
print(f"检测到 {len(keypoints)} 个人")
# 显示结果(需要GUI环境)
# result.show()
print("姿态估计完成!结果已保存为 result_pose.jpg")运行这个脚本:
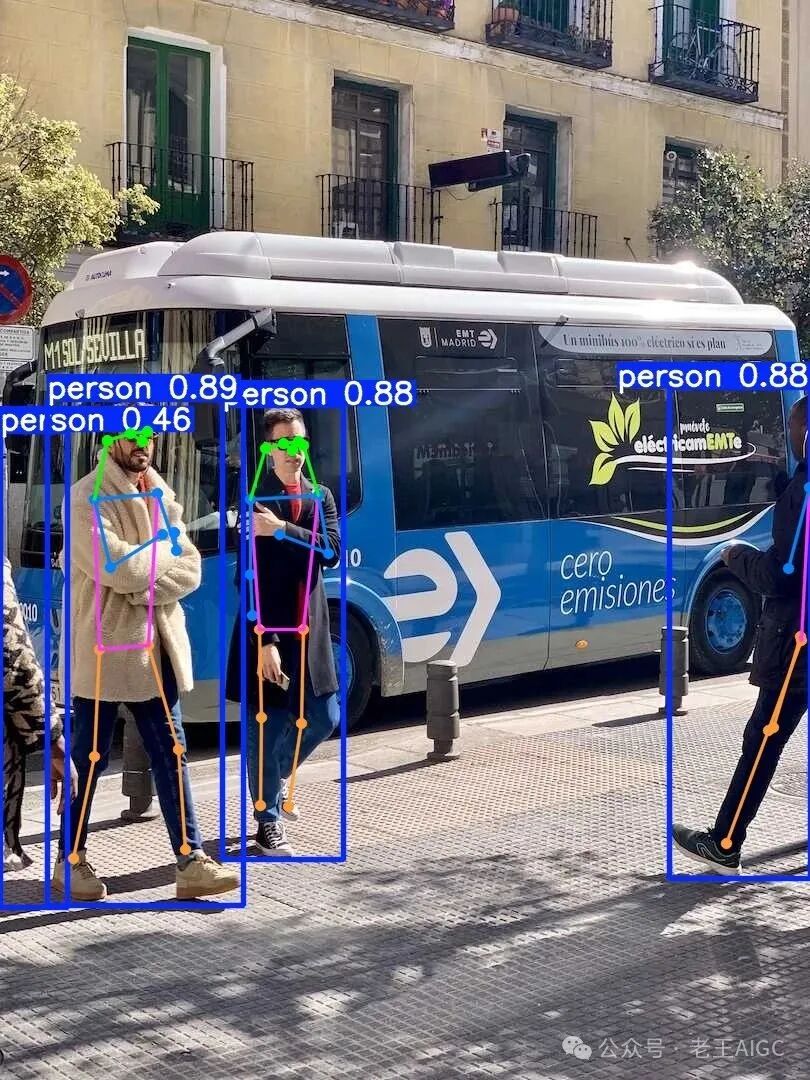
python pose_detection.py🎉 结果展示
运行成功后,你将得到一张标注完美的图片!YOLOv11精准地识别出了图中人物的17个关键点:
• 面部:鼻子、左右眼、左右耳
• 上身:左右肩膀、左右手肘、左右手腕
• 下身:左右髋部、左右膝盖、左右脚踝
这些关键点用彩色圆点标出,并用线条连接成完整的人体骨架。整个过程是不是快到飞起?⚡
🚀 更进一步:从姿态到行为分析
掌握了基础的姿态估计后,你就可以构建更复杂的应用了!
💼 工业应用案例
在制造业中,可以开发一套SOP合规性监控系统:
from ultralytics import YOLO
import cv2
import numpy as np
classSafetyMonitor:
def__init__(self):
self.model = YOLO("yolo11n-pose.pt")
self.safety_violations = 0
defcheck_safety_posture(self, keypoints):
"""Check if worker posture is safe"""
# Simplified safety check logic
iflen(keypoints) > 0:
# Check for excessive bending (simplified example)
shoulder_y = keypoints[0][5][1] # Left shoulder Y coordinate
hip_y = keypoints[0][11][1] # Left hip Y coordinate
ifabs(shoulder_y - hip_y) < 50: # Adjustable threshold
return"Warning: Unsafe posture detected!"
return"Posture normal"
defdraw_keypoints(self, frame, keypoints):
"""Draw pose keypoints on the frame"""
iflen(keypoints) > 0andlen(keypoints[0]) >= 17:
# COCO pose connections for industrial safety monitoring
connections = [
(5, 6), (5, 7), (7, 9), (6, 8), (8, 10), # Arms
(5, 11), (6, 12), (11, 12), # Torso
(11, 13), (13, 15), (12, 14), (14, 16) # Legs
]
# Draw keypoints
for i, point inenumerate(keypoints[0]):
if point[0] > 0and point[1] > 0: # Valid keypoint
color = (0, 0, 255) if i in [5, 11] else (0, 255, 0) # Highlight shoulder and hip
cv2.circle(frame, (int(point[0]), int(point[1])), 6, color, -1)
cv2.putText(frame, str(i), (int(point[0])+8, int(point[1])-8),
cv2.FONT_HERSHEY_SIMPLEX, 0.4, (255, 255, 255), 1)
# Draw connections
for connection in connections:
pt1, pt2 = connection
if (pt1 < len(keypoints[0]) and pt2 < len(keypoints[0]) and
keypoints[0][pt1][0] > 0and keypoints[0][pt1][1] > 0and
keypoints[0][pt2][0] > 0and keypoints[0][pt2][1] > 0):
cv2.line(frame,
(int(keypoints[0][pt1][0]), int(keypoints[0][pt1][1])),
(int(keypoints[0][pt2][0]), int(keypoints[0][pt2][1])),
(255, 0, 0), 2)
defmonitor_video(self, video_path):
"""Monitor safety postures in video"""
cap = cv2.VideoCapture(video_path)
print("Starting industrial safety monitoring... Press 'q' to quit")
whileTrue:
ret, frame = cap.read()
ifnot ret:
break
# YOLO pose estimation
results = self.model(frame, verbose=False)
for result in results:
if result.keypoints isnotNone:
keypoints = result.keypoints.xy.cpu().numpy()
# Draw keypoints and skeleton
self.draw_keypoints(frame, keypoints)
# Check safety posture
safety_status = self.check_safety_posture(keypoints)
# Display safety information
color = (0, 0, 255) if"Warning"in safety_status else (0, 255, 0)
cv2.putText(frame, safety_status,
(10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, color, 2)
cv2.putText(frame, f"Safety Violations: {self.safety_violations}",
(10, 70), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (255, 255, 255), 2)
if"Warning"in safety_status:
self.safety_violations += 1
cv2.imshow('Industrial Safety Monitor', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
print(f"Monitoring ended! Total safety violations: {self.safety_violations}")
# Usage example
monitor = SafetyMonitor()
monitor.monitor_video("factory_surveillance.mp4")使用即梦生成视频测试如下:
🏃♂️ 健身应用案例
开发智能健身助手,实时纠正运动姿势:
from ultralytics import YOLO
import cv2
import numpy as np
import math
classFitnessMonitor:
def__init__(self):
self.model = YOLO("yolo11n-pose.pt")
self.squat_count = 0
self.in_squat = False
defcalculate_angle(self, point1, point2, point3):
"""计算三点之间的角度"""
vector1 = np.array([point1[0] - point2[0], point1[1] - point2[1]])
vector2 = np.array([point3[0] - point2[0], point3[1] - point2[1]])
cos_angle = np.dot(vector1, vector2) / (np.linalg.norm(vector1) * np.linalg.norm(vector2))
cos_angle = np.clip(cos_angle, -1.0, 1.0)
angle = math.degrees(math.acos(cos_angle))
return angle
defanalyze_squat_form(self, keypoints):
"""Analyze squat posture for correctness"""
iflen(keypoints) > 0andlen(keypoints[0]) >= 17:
try:
# Get keypoints (COCO format)
left_hip = keypoints[0][11] # Left hip
left_knee = keypoints[0][13] # Left knee
left_ankle = keypoints[0][15] # Left ankle
right_hip = keypoints[0][12] # Right hip
right_knee = keypoints[0][14] # Right knee
right_ankle = keypoints[0][16] # Right ankle
# Check if keypoints are visible
if (left_hip[0] > 0and left_knee[0] > 0and left_ankle[0] > 0and
right_hip[0] > 0and right_knee[0] > 0and right_ankle[0] > 0):
# Calculate left and right knee angles
left_knee_angle = self.calculate_angle(left_hip, left_knee, left_ankle)
right_knee_angle = self.calculate_angle(right_hip, right_knee, right_ankle)
avg_knee_angle = (left_knee_angle + right_knee_angle) / 2
# Squat counting logic
if avg_knee_angle < 100andnotself.in_squat:
self.in_squat = True
self.squat_count += 1
elif avg_knee_angle > 160andself.in_squat:
self.in_squat = False
# Posture evaluation
if avg_knee_angle < 90:
return"Great! Squat depth is sufficient", avg_knee_angle, (0, 255, 0)
elif avg_knee_angle < 120:
return"Good! Can squat deeper", avg_knee_angle, (0, 255, 255)
else:
return"Suggestion: Squat deeper", avg_knee_angle, (0, 165, 255)
except (IndexError, ZeroDivisionError):
pass
return"No complete human pose detected", 0, (0, 0, 255)
defdraw_keypoints(self, frame, keypoints):
"""Draw pose keypoints on the frame"""
iflen(keypoints) > 0andlen(keypoints[0]) >= 17:
# COCO pose connections
connections = [
(5, 6), (5, 7), (7, 9), (6, 8), (8, 10), # Arms
(5, 11), (6, 12), (11, 12), # Torso
(11, 13), (13, 15), (12, 14), (14, 16) # Legs
]
# Draw keypoints
for i, point inenumerate(keypoints[0]):
if point[0] > 0and point[1] > 0: # Valid keypoint
cv2.circle(frame, (int(point[0]), int(point[1])), 5, (0, 255, 0), -1)
cv2.putText(frame, str(i), (int(point[0])+5, int(point[1])-5),
cv2.FONT_HERSHEY_SIMPLEX, 0.3, (255, 255, 255), 1)
# Draw connections
for connection in connections:
pt1, pt2 = connection
if (pt1 < len(keypoints[0]) and pt2 < len(keypoints[0]) and
keypoints[0][pt1][0] > 0and keypoints[0][pt1][1] > 0and
keypoints[0][pt2][0] > 0and keypoints[0][pt2][1] > 0):
cv2.line(frame,
(int(keypoints[0][pt1][0]), int(keypoints[0][pt1][1])),
(int(keypoints[0][pt2][0]), int(keypoints[0][pt2][1])),
(255, 0, 0), 2)
defmonitor_video(self, video_path=0):
"""Monitor fitness movements in video"""
cap = cv2.VideoCapture(video_path)
print("Starting fitness monitoring... Press 'q' to quit")
whileTrue:
ret, frame = cap.read()
ifnot ret:
break
# YOLO pose estimation
results = self.model(frame, verbose=False)
for result in results:
if result.keypoints isnotNone:
keypoints = result.keypoints.xy.cpu().numpy()
# Draw keypoints and skeleton
self.draw_keypoints(frame, keypoints)
# Analyze squat posture
feedback, angle, color = self.analyze_squat_form(keypoints)
# Display information
cv2.putText(frame, f"Squat Count: {self.squat_count}",
(10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 255, 255), 2)
cv2.putText(frame, feedback,
(10, 70), cv2.FONT_HERSHEY_SIMPLEX, 0.8, color, 2)
if angle > 0:
cv2.putText(frame, f"Knee Angle: {angle:.1f}°",
(10, 110), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (255, 255, 255), 2)
cv2.imshow('Fitness Pose Monitor', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
print(f"Monitoring ended! Total squats completed: {self.squat_count}")
# Usage example
if __name__ == "__main__":
monitor = FitnessMonitor()
# Use camera for monitoring
# monitor.monitor_video(0)
# Or monitor video file
monitor.monitor_video("workout_video.mp4")使用即梦生成视频测试如下:
❓ FAQ 常见问题解答
Q1: YOLOv11支持哪些设备?
A: YOLOv11支持CPU、GPU(NVIDIA CUDA)、以及各种边缘设备。在普通笔记本电脑上也能流畅运行nano版本。
Q2: 可以检测多个人吗?
A: 当然可以!YOLOv11能同时检测图像中的多个人,每个人都会有独立的关键点标注。
Q3: 如何提高检测精度?
A: 可以使用更大的模型(如yolo11l-pose.pt),或者在特定场景数据上进行微调训练。
Q4: 支持实时摄像头检测吗?
A: 支持!只需将source参数设置为0(默认摄像头)或摄像头设备ID即可。
Q5: 模型文件有多大?
A: nano版本仅约6MB,small版本约22MB,非常适合移动端部署。
🎯 总结
从环境安装到代码运行,我们全程只用了不到10分钟,就成功体验了SOTA级别的YOLOv11姿态估计功能!🎉
关键收获:
• ✅ 掌握了YOLOv11的基本使用方法
• ✅ 学会了姿态估计的核心概念
• ✅ 获得了可直接运行的完整代码
• ✅ 了解了实际应用场景和扩展方向
这背后是Ultralytics团队对易用性的极致追求和对技术的持续深耕。YOLOv11的发布,无疑又一次降低了AI技术的使用门槛,让更多开发者和爱好者能够轻松地将强大的AI视觉能力应用到自己的创意中。
别再犹豫了,现在就动手试试吧!在评论区分享你的实验结果,让我们一起探索AI视觉的无限可能!💪
想了解更多AI工具和技术趋势?关注我,每周为你带来最新的AI资讯和实用教程!

纵情码海钱塘涌,杭州开发者创新动! 属于杭州的开发者社区!致力于为杭州地区的开发者提供学习、合作和成长的机会;同时也为企业交流招聘提供舞台!
更多推荐

 23
23 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)