
多旋翼物流无人机节能轨迹规划附Python代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。
🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:做科研,博学之、审问之、慎思之、明辨之、笃行之,是为:博学慎思,明辨笃行。
🔥 内容介绍
一、引言
随着电商行业的迅猛发展,物流配送的效率和成本成为关键问题。多旋翼物流无人机以其灵活性和机动性,在最后一公里配送等场景中展现出巨大潜力。然而,其有限的续航能力限制了应用范围,因此节能轨迹规划显得尤为重要。通过优化飞行轨迹,能有效降低能耗,提升多旋翼物流无人机的实用性和经济性。
二、多旋翼物流无人机能耗分析
(一)能耗组成
- 悬停能耗
:多旋翼无人机在悬停时,为克服重力保持位置稳定,需要消耗能量。悬停能耗主要用于驱动电机使旋翼旋转产生足够的升力。其能耗大小与无人机的总重量、旋翼效率等因素相关。例如,较重的货物会增加无人机的总重量,从而使悬停时电机需输出更大功率,能耗相应增加。
- 飞行能耗
:在飞行过程中,除了克服重力,还需克服空气阻力。飞行能耗与飞行速度、姿态以及空气动力学特性紧密相关。飞行速度增加时,空气阻力增大,能耗会显著上升。同时,不恰当的飞行姿态可能导致空气动力学性能变差,进一步增加能耗。
(二)影响因素
- 载重
:载重是影响能耗的关键因素之一。较重的货物会使无人机的总重量增加,无论是悬停还是飞行,都需要更大的升力来支撑,从而导致能耗上升。例如,从空载到满载的过程中,无人机的能耗可能会大幅增加,严重影响续航里程。
- 飞行环境
:环境因素如风速、风向、气温等对能耗影响显著。逆风飞行时,无人机需额外克服风阻,能耗明显增加;而顺风飞行则相对节能。气温变化会影响空气密度,进而影响旋翼产生升力的效率,也会对能耗产生作用。
三、节能轨迹规划方法
(一)基于传统优化算法
- A * 算法
:A算法是一种经典的路径搜索算法,常用于在给定地图中寻找从起始点到目标点的最优路径。在多旋翼物流无人机节能轨迹规划中,可以将地图划分为网格,每个网格表示一个状态。通过定义启发式函数,估计从当前状态到目标状态的代价,引导搜索朝着目标方向进行。例如,启发式函数可以是当前位置到目标位置的直线距离,结合实际飞行代价(如考虑空气阻力、载重等因素导致的能耗),计算每个状态的总代价。A算法能找到理论上的最优路径,但在复杂环境中计算量较大。
- Dijkstra 算法
:Dijkstra 算法也是一种用于寻找最短路径的算法,它以广度优先搜索的方式遍历图中的节点。在轨迹规划中,将无人机的飞行路径看作图中的边,节点为飞行过程中的不同位置。通过不断更新从起始节点到其他节点的最小代价路径,最终找到从起始点到目标点的最小代价轨迹。该算法能保证找到全局最优解,但同样在大规模问题中计算效率较低。
(二)基于智能优化算法
- 遗传算法
:遗传算法模拟生物进化过程,通过选择、交叉和变异等操作对轨迹进行优化。首先,将轨迹编码为染色体,每个染色体代表一种可能的飞行轨迹。然后,根据能耗等目标函数计算每个染色体的适应度,适应度越高表示该轨迹越节能。在选择操作中,优先选择适应度高的染色体;交叉操作通过交换两个染色体的部分基因产生新的轨迹;变异操作则随机改变染色体的某些基因,增加种群的多样性。通过多代进化,逐渐找到最优的节能轨迹。
- 粒子群优化算法
:粒子群优化算法模拟鸟群觅食行为。每个粒子代表一个潜在的轨迹解,粒子在解空间中飞行,根据自身的飞行经验(历史最优位置)和群体的经验(全局最优位置)调整飞行方向和速度。在多旋翼物流无人机轨迹规划中,粒子的位置表示轨迹参数,速度表示轨迹的调整量。通过不断迭代更新粒子的位置和速度,使粒子逐渐靠近最优解,即节能的飞行轨迹。
四、考虑实际约束的轨迹规划
(一)载重约束
载重会改变无人机的飞行性能和能耗特性,在轨迹规划时必须考虑。例如,当载重较大时,无人机的最大飞行速度、上升和下降速率可能会降低。规划轨迹时,应避免速度过快或升降过于剧烈的路径,以防止电机过载和能耗剧增。可以根据载重调整轨迹规划算法中的代价函数,使算法优先选择适合当前载重的节能路径。
(二)环境约束
- 障碍物
:实际飞行环境中存在各种障碍物,如建筑物、树木等。轨迹规划需确保无人机能安全避开这些障碍物。可以将环境地图中的障碍物信息融入轨迹规划算法,例如在 A * 算法或智能优化算法中,将障碍物所在位置设置为不可通过状态,或者赋予其极高的代价,引导算法寻找绕过障碍物的路径。
- 气象条件
:风速和风向对无人机能耗影响显著。在轨迹规划时,可获取实时气象数据,根据风向调整飞行方向,尽量选择顺风或侧风飞行路径,减少逆风飞行距离,从而降低能耗。同时,考虑不同风速下无人机的飞行性能变化,合理调整轨迹的速度和姿态参数。
五、节能轨迹规划实现与验证
(一)模拟实现
利用计算机模拟软件,建立多旋翼物流无人机的模型,包括其动力学模型、能耗模型以及环境模型。在模拟环境中设置起始点、目标点和各种实际约束条件,运用选定的轨迹规划算法进行轨迹生成。例如,在 MATLAB 环境中,通过编写代码实现 A * 算法、遗传算法等轨迹规划算法,并结合无人机的参数和环境信息,模拟生成节能轨迹。同时,对生成的轨迹进行能耗计算和分析,评估轨迹的节能效果。
(二)实验验证
搭建实验平台,使用实际的多旋翼物流无人机进行飞行实验。在实验场地设置障碍物,模拟不同的气象条件,按照模拟生成的节能轨迹进行飞行测试。通过安装在无人机上的传感器,如电流传感器、GPS 模块等,实时采集飞行过程中的能耗、位置等数据。将实验数据与模拟结果进行对比分析,验证节能轨迹规划的有效性。同时,根据实验结果对轨迹规划算法进行调整和优化,提高其在实际应用中的准确性和可靠性。
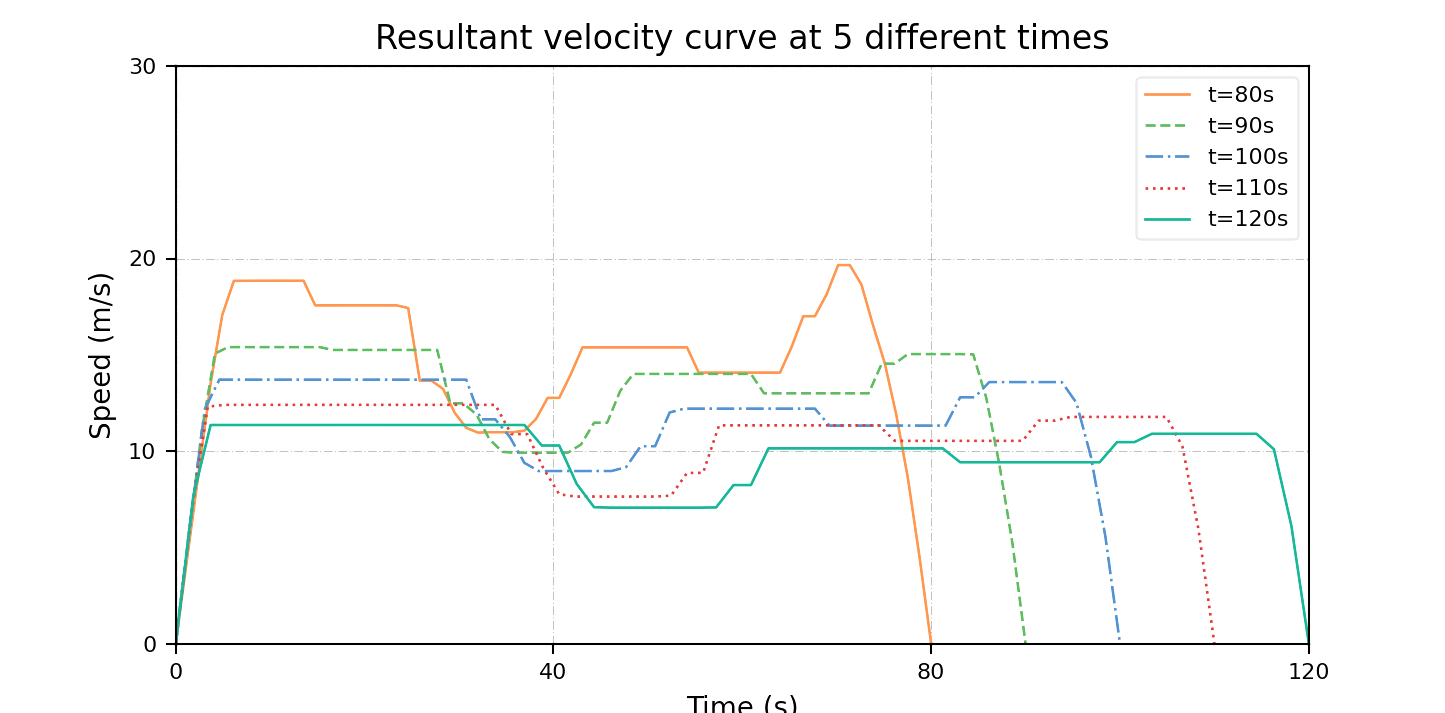
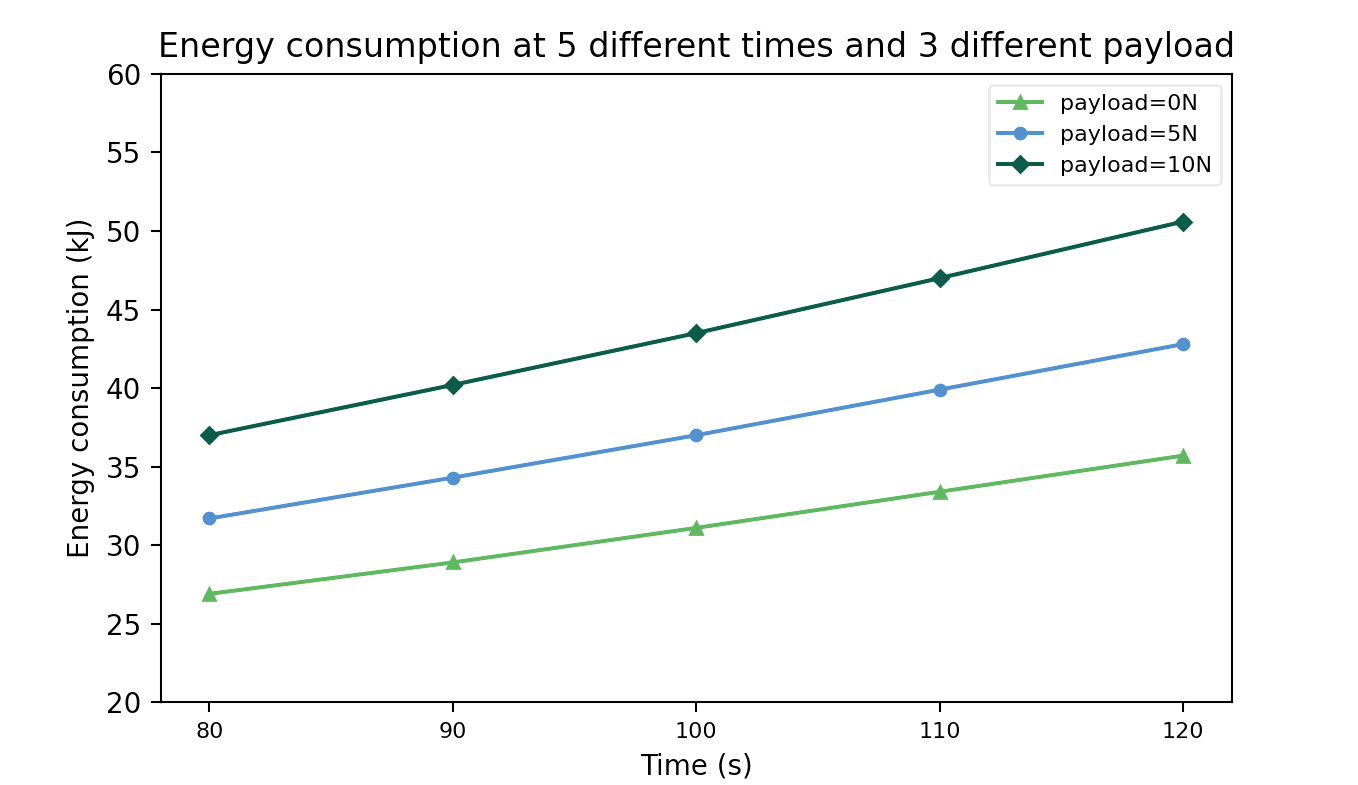
⛳️ 运行结果
🔗 参考文献
🍅更多免费数学建模和仿真教程关注领取
更多推荐
 8
8 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)