
C++ -- 哈希表实现
1. 哈希概念
哈希(hash)⼜称散列,是⼀种组织数据的⽅式。从译名来看,有散乱排列的意思。本质就是通过哈希 函数把关键字Key跟存储位置建⽴⼀个映射关系,查找时通过这个哈希函数计算出Key存储的位置,进 ⾏快速查找。
1.1 直接定址法
当关键字的范围⽐较集中时,直接定址法就是⾮常简单⾼效的⽅法,⽐如⼀组关键字都在[0,99]之间, 那么我们开⼀个100个数的数组,每个关键字的值直接就是存储位置的下标。再⽐如⼀组关键字值都在 [a,z]的⼩写字⺟,那么我们开⼀个26个数的数组,每个关键字acsii码-a ascii码就是存储位置的下标。 也就是说直接定址法本质就是⽤关键字计算出⼀个绝对位置或者相对位置。
1.2 哈希冲突
直接定址法的缺点也⾮常明显,当关键字的范围⽐较分散时,就很浪费内存甚⾄内存不够⽤。假设我 们只有数据范围是[0,9999]的N个值,我们要映射到⼀个M个空间的数组中(⼀般情况下M>=N),那么 就要借助哈希函数(hash function)hf,关键字key被放到数组的h(key)位置,这⾥要注意的是h(key)计 算出的值必须在[0,M)之间。
这⾥存在的⼀个问题就是,两个不同的key可能会映射到同⼀个位置去,这种问题我们叫做哈希冲突, 或者哈希碰撞。理想情况是找出⼀个好的哈希函数避免冲突,但是实际场景中,冲突是不可避免的, 所以我们尽可能设计出优秀的哈希函数,减少冲突的次数,同时也要去设计出解决冲突的⽅案。
1.3 负载因⼦
假设哈希表中已经映射存储了N个值,哈希表的⼤⼩为M,那么 ,负载因⼦有些地⽅ 也翻译为载荷因⼦/装载因⼦等,他的英⽂为load factor。负载因⼦越⼤,哈希冲突的概率越⾼,空间 利⽤率越⾼;负载因⼦越⼩,哈希冲突的概率越低,空间利⽤率越低;
1.4 将关键字转为整数
我们将关键字映射到数组中位置,⼀般是整数好做映射计算,如果不是整数,我们要想办法转换成整 数,这个细节我们后⾯代码实现中再进⾏细节展⽰。下⾯哈希函数部分我们讨论时,如果关键字不是 整数,那么我们讨论的Key是关键字转换成的整数。
1.5 哈希函数
⼀个好的哈希函数应该让N个关键字被等概率的均匀的散列分布到哈希表的M个空间中,但是实际中却 很难做到,但是我们要尽量往这个⽅向去考量设计。
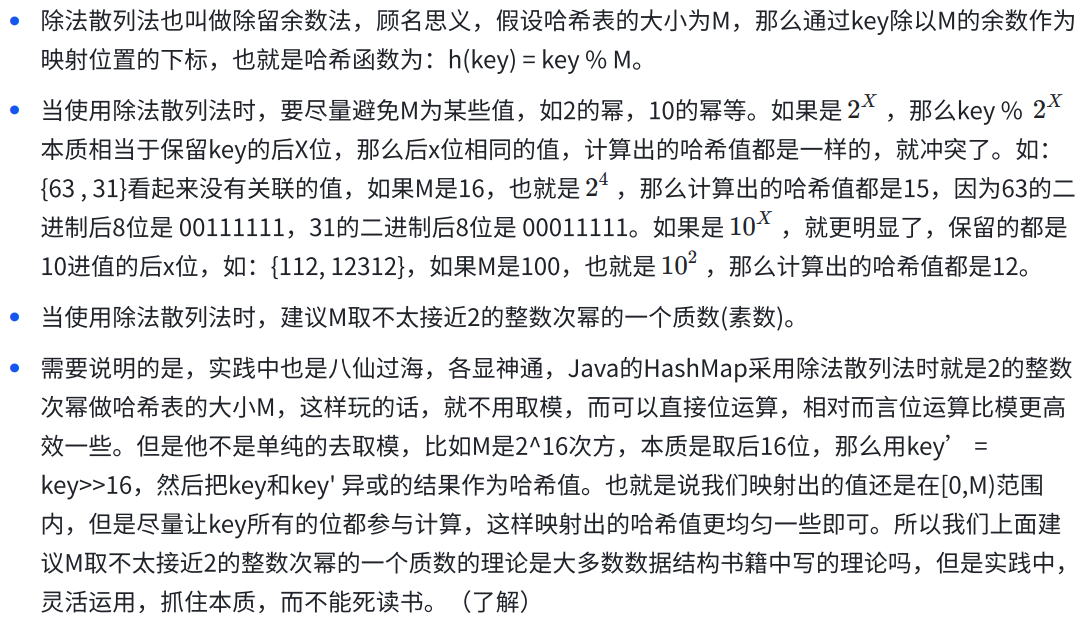
1.5.1 除法散列法/除留余数法
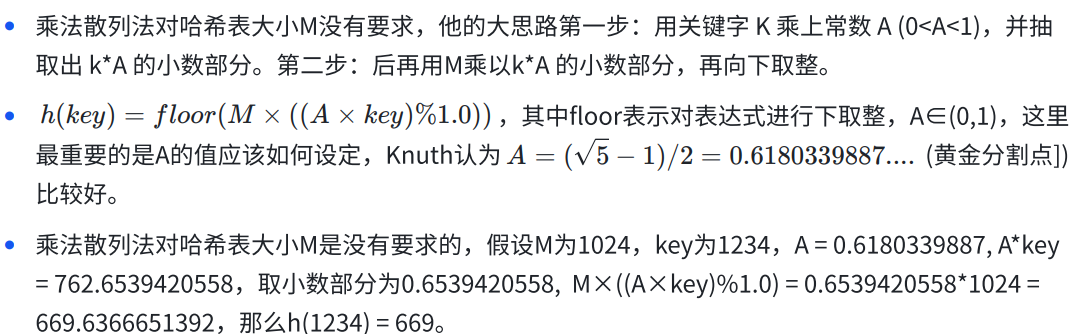
1.5.2 乘法散列法(了解)
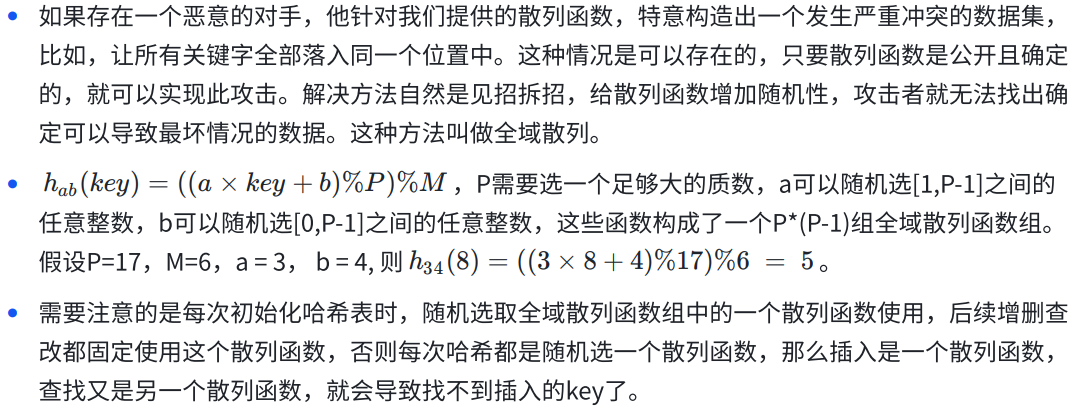
1.5.3 全域散列法(了解)
1.6 处理哈希冲突
实践中哈希表⼀般还是选择除法散列法作为哈希函数,当然哈希表⽆论选择什么哈希函数也避免不了 冲突,那么插⼊数据时,如何解决冲突呢?主要有两种两种⽅法,开放定址法和链地址法。
1.6.1 开放定址法
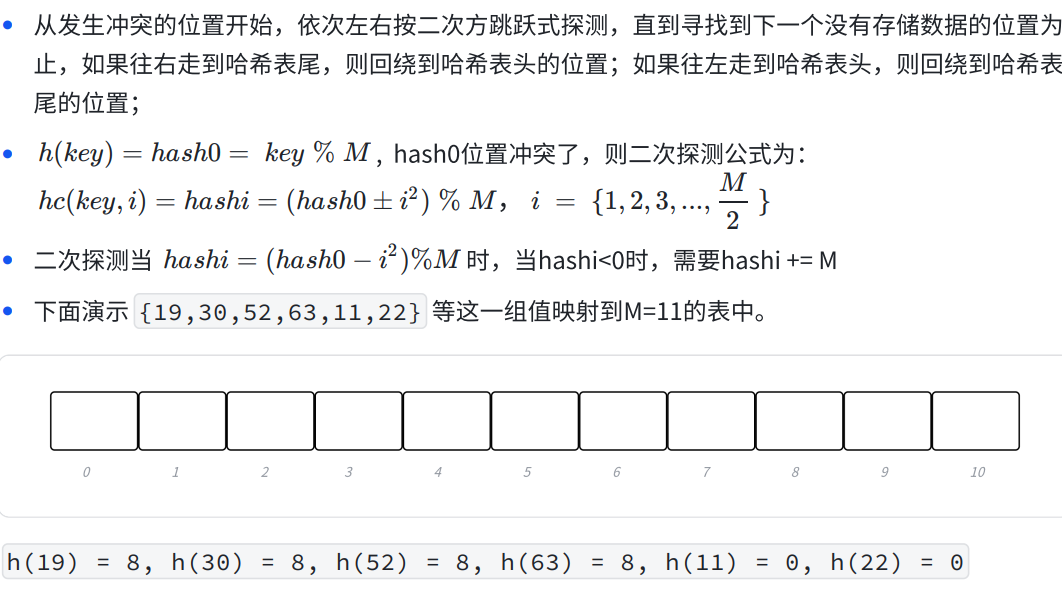
在开放定址法中所有的元素都放到哈希表⾥,当⼀个关键字key⽤哈希函数计算出的位置冲突了,则按 照某种规则找到⼀个没有存储数据的位置进⾏存储,开放定址法中负载因⼦⼀定是⼩于的。这⾥的规 则有三种:线性探测、⼆次探测、双重探测。
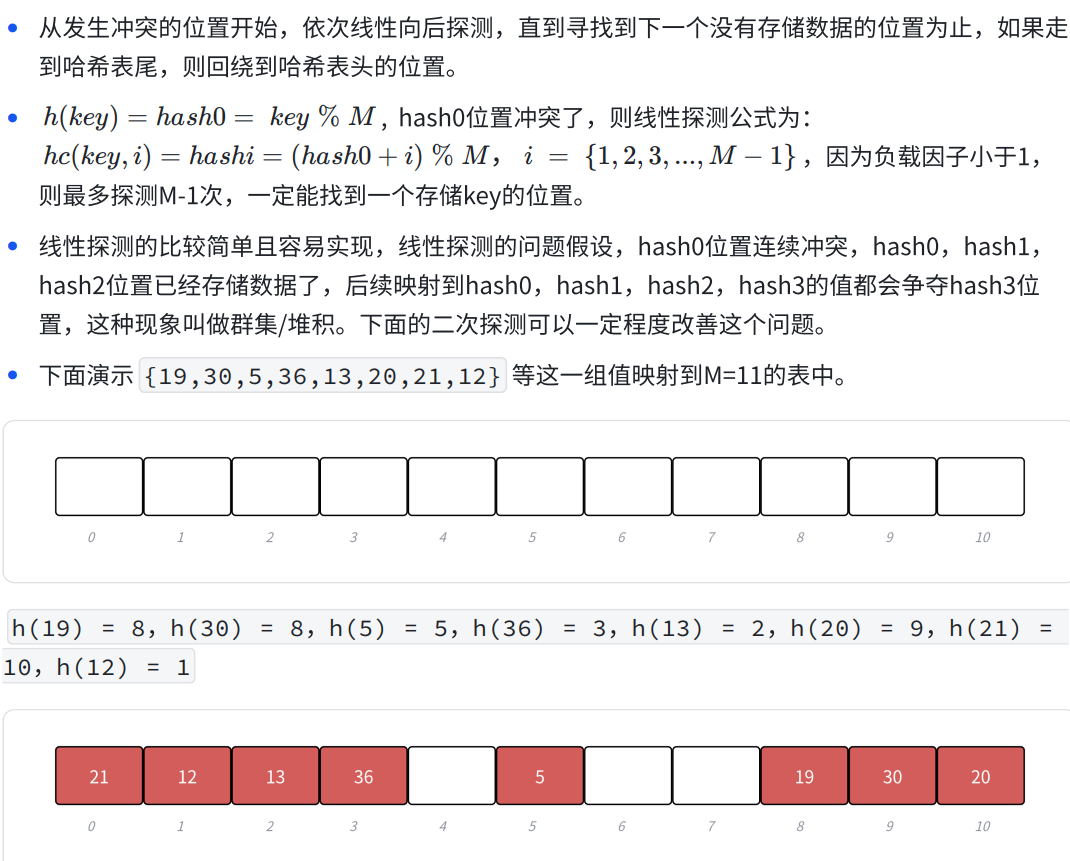
线性探测:
二次探测:

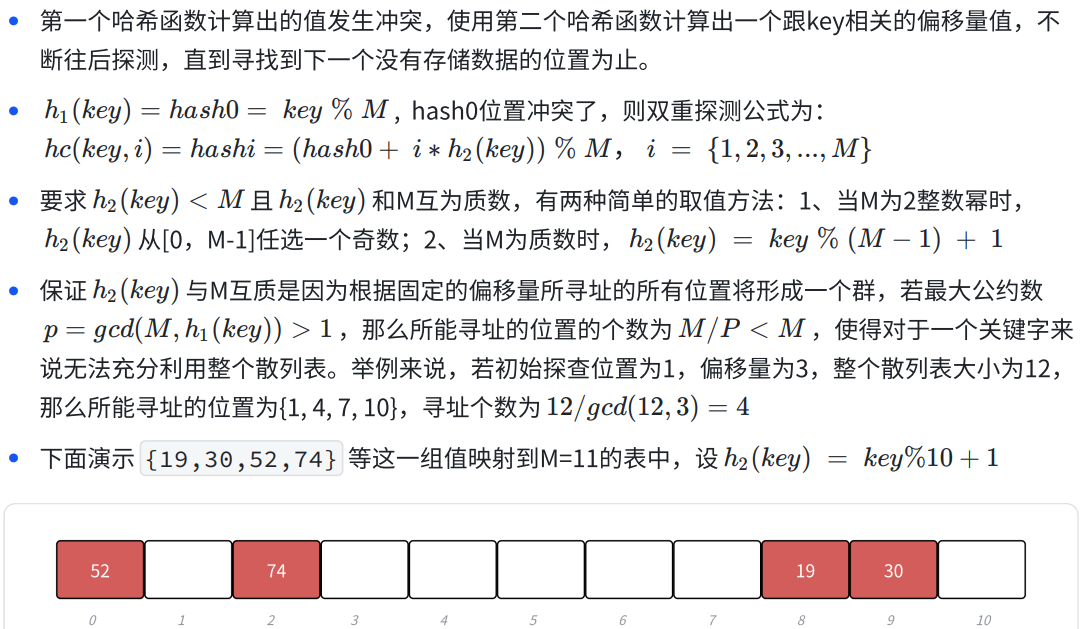
双重散列:
1.6.2 开放定址法代码实现
开放定址法的哈希表结构
enum State
{
EXIST,
EMPTY,
DELETE
};
template<class K, class V>
struct HashData
{
pair<K, V> _kv;
State _state = EMPTY;
};
template<class K, class V>
class HashTable
{
private:
vector<HashData<K, V>> _tables;
size_t _n = 0; // 表中存储数据个数
};
要注意的是这⾥需要给每个存储值的位置加⼀个状态标识,否则删除⼀些值以后,会影响后⾯冲突的 值的查找
扩容
这⾥我们哈希表负载因⼦控制在0.7,当负载因⼦到0.7以后我们就需要扩容了,我们还是按照2倍扩 容,但是同时我们要保持哈希表⼤⼩是⼀个质数,第⼀个是质数,2倍后就不是质数了
inline unsigned long __stl_next_prime(unsigned long n)
{
// Note: assumes long is at least 32 bits.
static const int __stl_num_primes = 28;
static const unsigned long __stl_prime_list[__stl_num_primes] =
{
53, 97, 193, 389, 769,
1543, 3079, 6151, 12289, 24593,
49157, 98317, 196613, 393241, 786433,
1572869, 3145739, 6291469, 12582917, 25165843,
50331653, 100663319, 201326611, 402653189, 805306457,
1610612741, 3221225473, 4294967291
};
const unsigned long* first = __stl_prime_list;
const unsigned long* last = __stl_prime_list + __stl_num_primes;
const unsigned long* pos = lower_bound(first, last, n);
return pos == last ? *(last - 1) : *pos;
}
if ((double)_n / _tables.size() >= 0.7)
{
HashTable<K, V, Hash> newHT;
newHT._tables.resize(__stl_next_prime(_tables.size()+1));
// 遍历旧表将所有值映射到新表
for (auto& data : _tables)
{
if (data._status == EXIST)
{
newHT.Insert(data._kv);
}
}
_tables.swap(newHT._tables);
}
key不能取模的问题
当key是string/Date等类型时,key不能取模,那么我们需要给HashTable增加⼀个仿函数,这个仿函 数⽀持把key转换成⼀个可以取模的整形,如果key可以转换为整形并且不容易冲突,那么这个仿函数 就⽤默认参数即可,如果这个Key不能转换为整形,我们就需要⾃⼰实现⼀个仿函数传给这个参数,实 现这个仿函数的要求就是尽量key的每值都参与到计算中,让不同的key转换出的整形值不同。
template<class K>
struct HashFunc
{
size_t operator()(const K& key)
{
return (size_t)key;
}
};
template<>
struct HashFunc<string>
{
size_t operator()(const string& str)
{
size_t hash = 0;
for (auto ch : str)
{
hash += ch;
hash *= 131;
}
return hash;
}
};
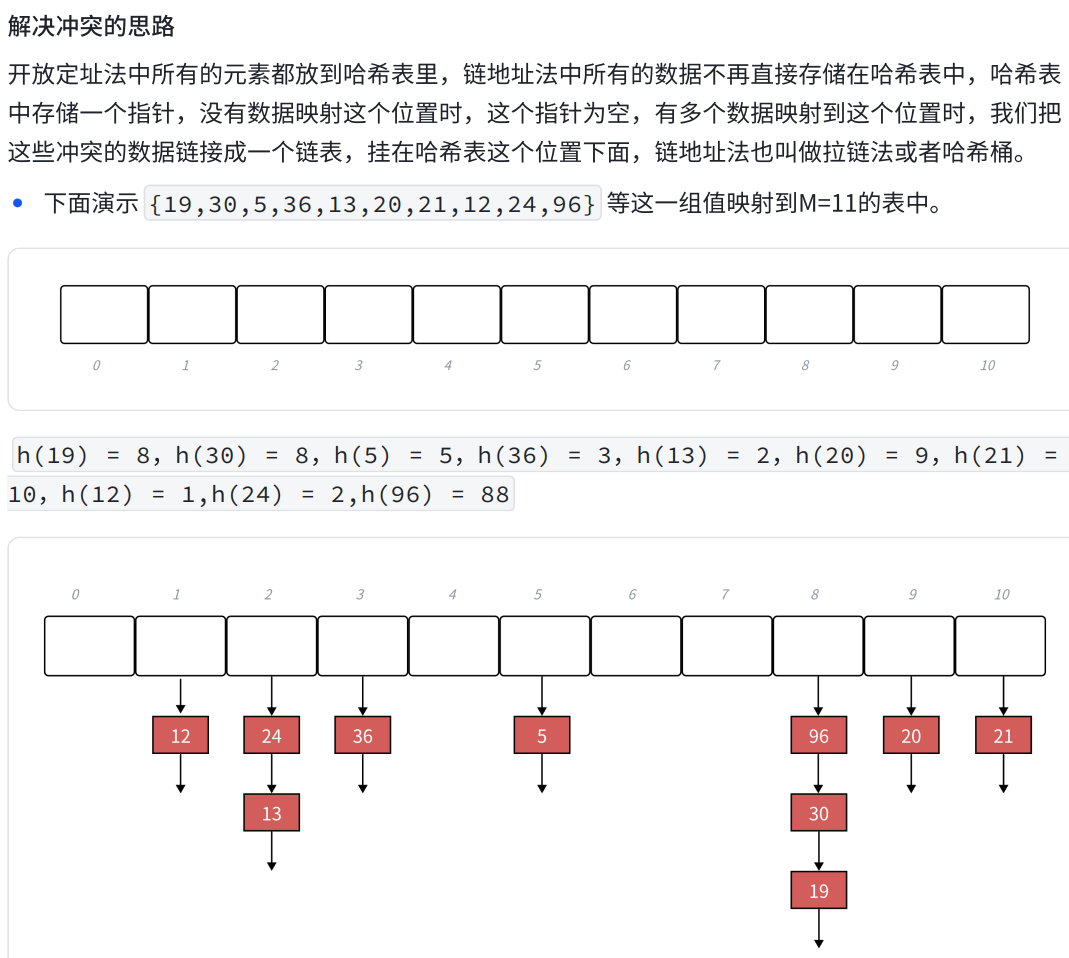
1.6.3 链地址法
扩容:
开放定址法负载因⼦必须⼩于1,链地址法的负载因⼦就没有限制了,可以⼤于1。负载因⼦越⼤,哈 希冲突的概率越⾼,空间利⽤率越⾼;负载因⼦越⼩,哈希冲突的概率越低,空间利⽤率越低;stl中 unordered_xxx的最⼤负载因⼦基本控制在1,⼤于1就扩容
极端场景
如果极端场景下,某个桶特别⻓怎么办?其实我们可以考虑使⽤全域散列法,这样就不容易被针对 了。但是假设不是被针对了,⽤了全域散列法,但是偶然情况下,某个桶很⻓,查找效率很低怎么 办?这⾥在Java8的HashMap中当桶的⻓度超过⼀定阀值(8)时就把链表转换成红⿊树。⼀般情况下, 不断扩容,单个桶很⻓的场景还是⽐较少的,下⾯我们实现就不搞这么复杂了,这个解决极端场景的 思路,⼤家了解⼀下
namespace hash_bucket
{
template<class K,class V>
struct HashNode
{
pair<K, V> _kv;
HashNode<k, V>* _next;
HashNode(const pair<K,V>& kv)
:_kv(kv)
,next(nullptr)
{ }
};
template<class K, class V, class Hash = HashFunc<K>>
class HashTable
{
typedef HashNode<K, V> Node;
public:
HashTable()
:_tables(__stl_next_prime(1), nullptr)
, _n(0)
{}
~HashTable()
{
for (size_t i = 0; i < _tables.size(); i++)
{
Node* cur = tables[i];
while (cur)
{
Node* next = cur->_next;
delete cur;
cur = next;
}
_tables[i] = nullptr;
}
}
bool Insert(const pair<K, V>& kv)
{
if (Find(kv.first))
return false;
Hash hs;
if (_n == _tables.size())
{
vector<Node*> newtables(__stl_next_prime(_tables.size() + 1));
for (size_t i = 0; i < _tables.size(); i++)
{
Node* cur = _tables[i];
while (cur)
{
Node* next = cur->_next;
size_t hashi = hs(cur->_kv.first) % newtables.size();
cur->_next = newtables[hashi];
newtables[hashi] = cur;
cur = next;
}
_tables[i] = nullptr;
}
_tables.swap(newtables);
}
size_t hashi = hs(kv.first) % _tables.size();
Node* newNode = new Node(kv);
newNode->_next = _tables[hashi];
_tables[hashi] = newNode;
++_n;
return true;
}
Node* Find(const K& key)
{
Hash hs;
size_t hashi = hs(key) % _tables.size();
Node* cur = _tables[hashi];
while (cur)
{
if (cur->_kv.first == key)
return cur;
cur = cur->_next;
}
return nullptr;
}
bool Erase(const K& key)
{
Hash hs;
size_t hashi = hs(key) % _tables.size();
Node* prev = nullptr;
Node* cur = tables[hashi];
while (cur)
{
if (cur->_kv.first == key)
{
if (prev == nulptr)
{
_tables[hashi] = cur->_next;
}
else
{
prev->_next = cur->_next;
}
delete cur;
return true;
}
prev = cur;
cur = cur->_next;
}
return false;
}
private:
//vector<list<pair<K, V>>> _tables;
vector<Node*> _tables;
size_t _n = 0; // 实际存储的数据个数
};
}更多推荐
 15
15 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)