
arXiv每日学术速递 | 具身智能:AI的下一个革命?
本文来源公众号,仅用于学术分享,侵权删,干货满满。不管在学术界还是工业界,具身智能都是十分火爆的方向!比如光是CVPR上,其就在热门研究领域前列;而在今年的AI领域融资中,具身智能类公司更是占据了半壁江山!不管你是想发论文,还是为就业做准备,都非常推荐多关注。主要在于:具身智能让AI真正长出了“身体”,能动手又能跑,是连接网络空间和物理世界的关键技术,对实现人工通用智能(AGI)至关重要!同时,多
本文来源公众号“arXiv每日学术速递”,仅用于学术分享,侵权删,干货满满。
原文链接:https://mp.weixin.qq.com/s/eEtzOKd0mmdMcNjDFyAkXQ
不管在学术界还是工业界,具身智能都是十分火爆的方向!比如光是CVPR上,其就在热门研究领域前列;而在今年的AI领域融资中,具身智能类公司更是占据了半壁江山!不管你是想发论文,还是为就业做准备,都非常推荐多关注。
主要在于:具身智能让AI真正长出了“身体”,能动手又能跑,是连接网络空间和物理世界的关键技术,对实现人工通用智能(AGI)至关重要!
同时,多模态大模型的发展,也为领域注入了新的力量。目前还处于上升期,创新机会很多。
为让大家能够紧跟领域前沿,找到更多idea启发,我给大家准备了181篇必读论文,原文和源码都有。主要涵盖具身机器人、模拟器、具身交互、具身感知、具身智能体等热门方向。
Embodied Simulators
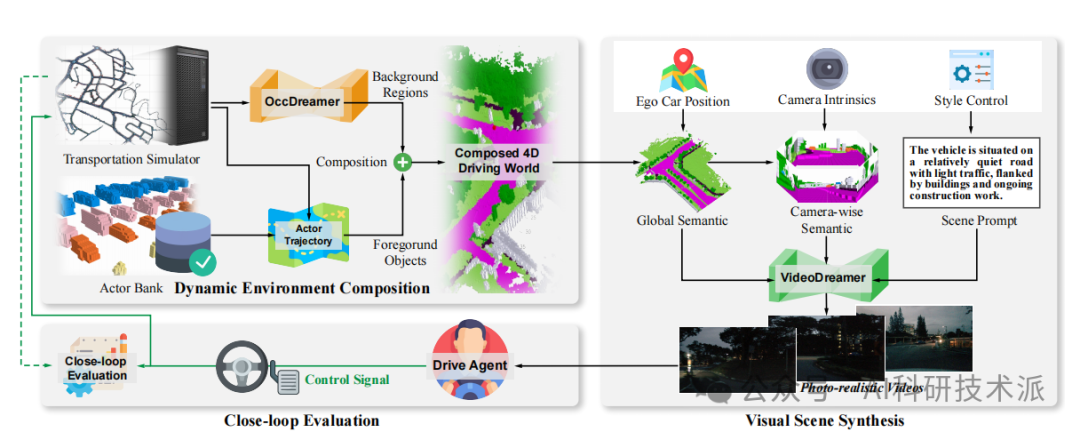
论文:DrivingSphere: Building a High-fidelity 4D World for Closed-loop Simulation
内容
该论文介绍了DrivingSphere,这是一个用于自动驾驶闭环仿真测试的高保真4D世界构建框架。它通过动态环境组合模块生成包含静态背景和动态对象的4D驾驶世界,并利用视觉场景合成模块将其转化为高保真、多视角的视频输出,确保时空一致性。
具身感知
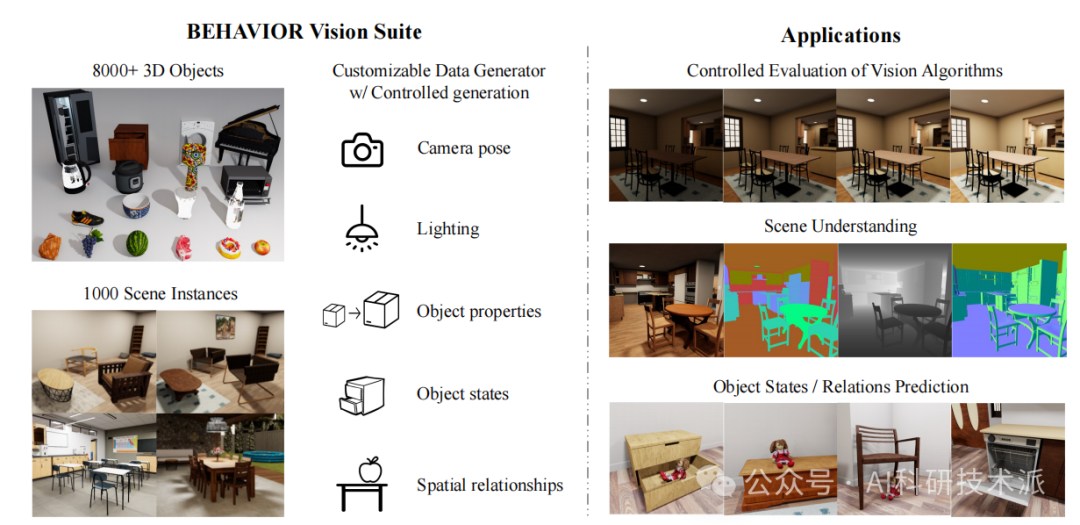
论文:BEHAVIORVision Suite: Customizable Dataset Generation via Simulation
内容
该论文介绍了BVS,这是一个用于计算机视觉模型系统评估和理解的工具集,能够生成完全定制的合成数据。BVS基于BEHAVIOR-1K基准测试扩展而来,支持在场景级、物体级和相机级等层面进行大量可调参数的定制化数据生成,以进行受控实验。
具身交互
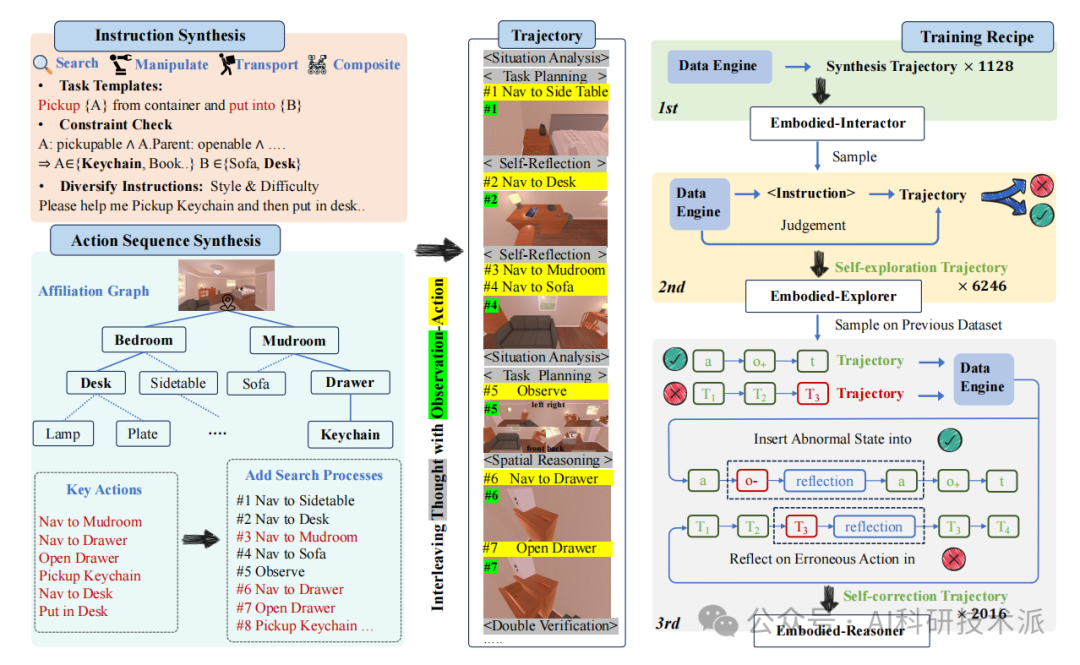
论文:Embodied-Reasoner: Synergizing Visual Search, Reasoning, and Action for Embodied Interactive Tasks
内容
该论文介绍了一个名为Embodied Reasoner的模型,它将视觉搜索、推理和行动相结合,用于交互式任务。该模型通过模仿学习、自我探索和自我修正的三阶段训练流程,利用合成的轨迹进行训练,这些轨迹包含64k交互图像和90k多样的思维过程。
具身智能体
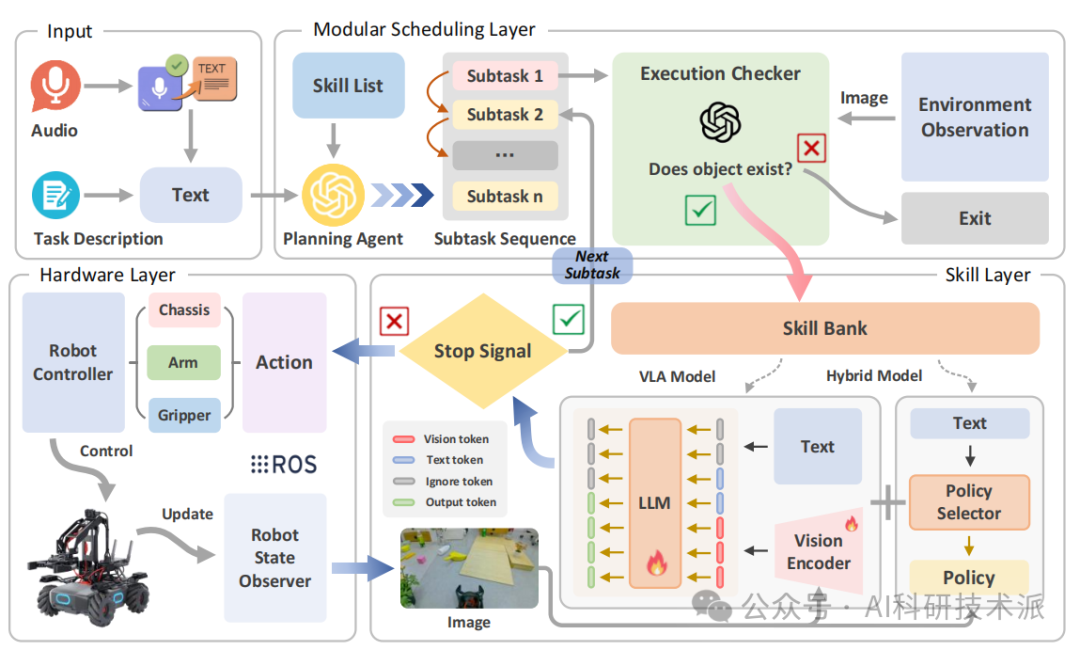
论文:RoboMatrix: A Skill-centric Hierarchical Framework for Scalable Robot Task Planning and Execution in Open-World
内容
该论文这篇论文介绍了一个名为RoboMatrix的技能中心化的层次化框架,用于在开放世界环境中可扩展的机器人任务规划和执行,通过从多样化复杂任务中提取通用的元技能,并通过技能组合来完成未见过的任务。
Sim-to-Real Adaptation
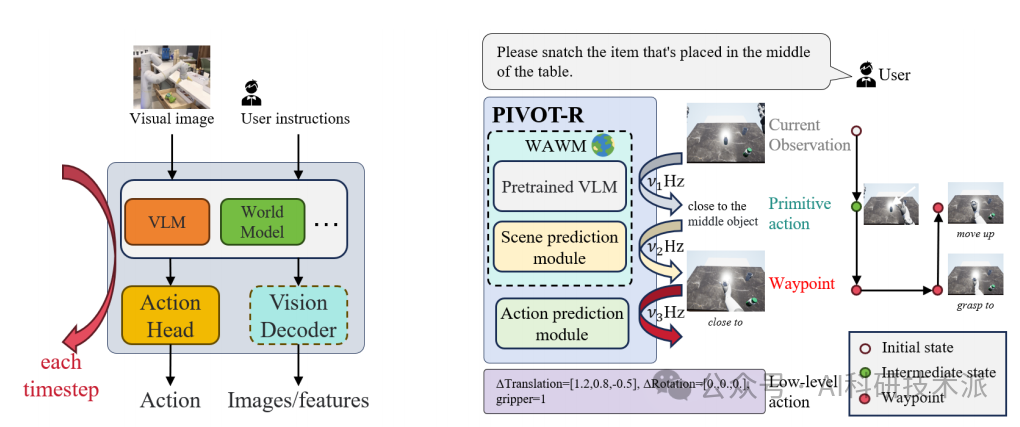
论文:PIVOT-R: Primitive-Driven Waypoint-Aware World Model for Robotic Manipulation
内容
该论文介绍了一个名为PIVOT-R的模型,用于语言引导的机器人操作任务。它通过预测任务相关的关键点来改善机器人对动态环境的建模能力,从而提高操作性能,通过异步分层执行器(AHE)以不同的执行频率运行这些模块,从而减少计算冗余并提高执行效率。
THE END !
文章结束,感谢阅读。您的点赞,收藏,评论是我继续更新的动力。大家有推荐的公众号可以评论区留言,共同学习,一起进步。
更多推荐

 9
9 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)