
【多无人机追捕-逃逸】平面中多追捕者保证实现的分散式追捕-逃逸策略研究(Matlab代码实现)
多无人机协同追捕-逃逸问题属于多智能体动态博弈领域,具有军事防御、边境巡逻、灾难救援等应用场景。传统集中式控制依赖全局信息,存在通信延迟、单点故障等问题。分散式策略通过局部感知与自主决策,可提升系统鲁棒性与适应性。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
多无人机追捕-逃逸平面分散式策略研究
一、研究背景与问题定义
研究背景:多无人机协同追捕-逃逸问题属于多智能体动态博弈领域,具有军事防御、边境巡逻、灾难救援等应用场景。传统集中式控制依赖全局信息,存在通信延迟、单点故障等问题。分散式策略通过局部感知与自主决策,可提升系统鲁棒性与适应性。
问题定义:在二维平面中,N架追捕无人机(Pursuers)需协作捕获M架逃逸无人机(Evaders)。逃逸者采用智能躲避策略,追捕者仅能通过局部传感器获取邻域信息。目标为设计分散式控制律,使追捕者在有限时间内成功包围逃逸者。
二、分散式策略设计方法
分散式策略需满足以下条件:
- 局部感知:无人机仅能获取邻域内其他无人机的位置、速度信息。
- 自主决策:每架无人机基于局部信息独立计算控制输入。
- 协同性:通过隐式通信(如运动趋势)或显式通信(如有限带宽消息)实现协作。
典型方法:
- 基于Voronoi图的策略:
- 动态Voronoi分区:根据无人机位置实时划分空间,追捕者向自身Voronoi单元内的逃逸者移动。
- 改进方法:引入障碍感知的缓冲Voronoi图(OABVC),通过膨胀障碍物边界确保避障安全性。
- 案例:李品品(2025)提出OABVC策略,在仿真中实现100%包围成功率。
- 基于比例导引律的策略:
- Leader-Follower架构:指定一架追捕者为Leader,采用比例导引律追踪逃逸者;Follower通过分布式编队控制跟踪Leader。
- 改进方法:当Follower接近逃逸者时,切换为协同比例导引律,实现同步打击。
- 案例:李品品(2025)验证该策略在无界环境中的有效性。
- 基于博弈论的策略:
- 纳什均衡求解:将追逃问题建模为非零和微分博弈,追捕者与逃逸者通过优化各自性能指标(如距离最小化、能耗最小化)达到动态平衡。
- 案例:张旭等(2015)通过线性二次型性能指标求解纳什均衡,证明策略在无障碍区中的最优性。
- 基于强化学习的策略:
- 多智能体深度强化学习(MADDPG):追捕者通过集中训练学习协作策略,分布式执行时仅依赖局部观测。
- 改进方法:引入逃逸者预测网络(TP Net),利用LSTM预测逃逸者轨迹,提升部分可观测条件下的决策精度。
- 案例:Game of Drones(2025)通过CBC-TP Net实现城市环境中的95%捕获率。
三、关键技术与挑战
- 部分可观测性处理:
- 问题:局部感知导致信息不完整,易陷入局部最优。
- 解决方案:
- 历史状态融合:通过LSTM网络记忆逃逸者历史轨迹。
- 注意力机制:利用Multi-head Self-Attention捕捉观测值间的相关性。
- 动态环境适应性:
- 问题:障碍物、动态逃逸策略增加不确定性。
- 解决方案:
- 自适应环境生成器:在训练中动态生成障碍物布局,提升策略泛化能力。
- 两阶段奖励优化:先优化距离奖励,再优化捕捉奖励,平衡探索与利用。
- 通信约束:
- 问题:有限带宽下如何实现有效协作。
- 解决方案:
- 隐式通信:通过运动趋势传递信息(如Voronoi图更新)。
- 事件触发通信:仅在需要协同时发送消息(如Leader切换)。
四、仿真与实验验证
- 仿真环境:
- 工具:Unity3D(物理引擎)、PyTorch(强化学习框架)、MATLAB(博弈论建模)。
- 场景:包含障碍物的城市环境、无界开放空间、动态逃逸策略。
- 性能指标:
- 捕获率:成功包围逃逸者的比例。
- 收敛时间:从初始状态到捕获所需时间步数。
- 能耗:无人机执行策略的总推力消耗。
- 典型结果:
- 分散式Voronoi策略:在10×10障碍物环境中,10架追捕者平均120步捕获5架逃逸者,成功率98%。
- MADDPG+TP Net:在城市环境中,3架追捕者平均85步捕获1架逃逸者,成功率95%。
- 博弈论策略:在无障碍区中,追逃双方达到纳什均衡,追捕者能耗降低20%。
五、应用场景与扩展方向
- 军事防御:拦截入侵无人机群,保护关键设施。
- 边境巡逻:追踪非法越境目标,减少人力投入。
- 灾难救援:定位受困者,同时避开危险区域。
扩展方向:
- 三维空间追逃:将策略扩展至空中或水下环境。
- 异构无人机编队:结合固定翼与旋翼无人机的优势。
- 对抗性逃逸策略:研究更智能的逃逸算法(如深度强化学习驱动)。
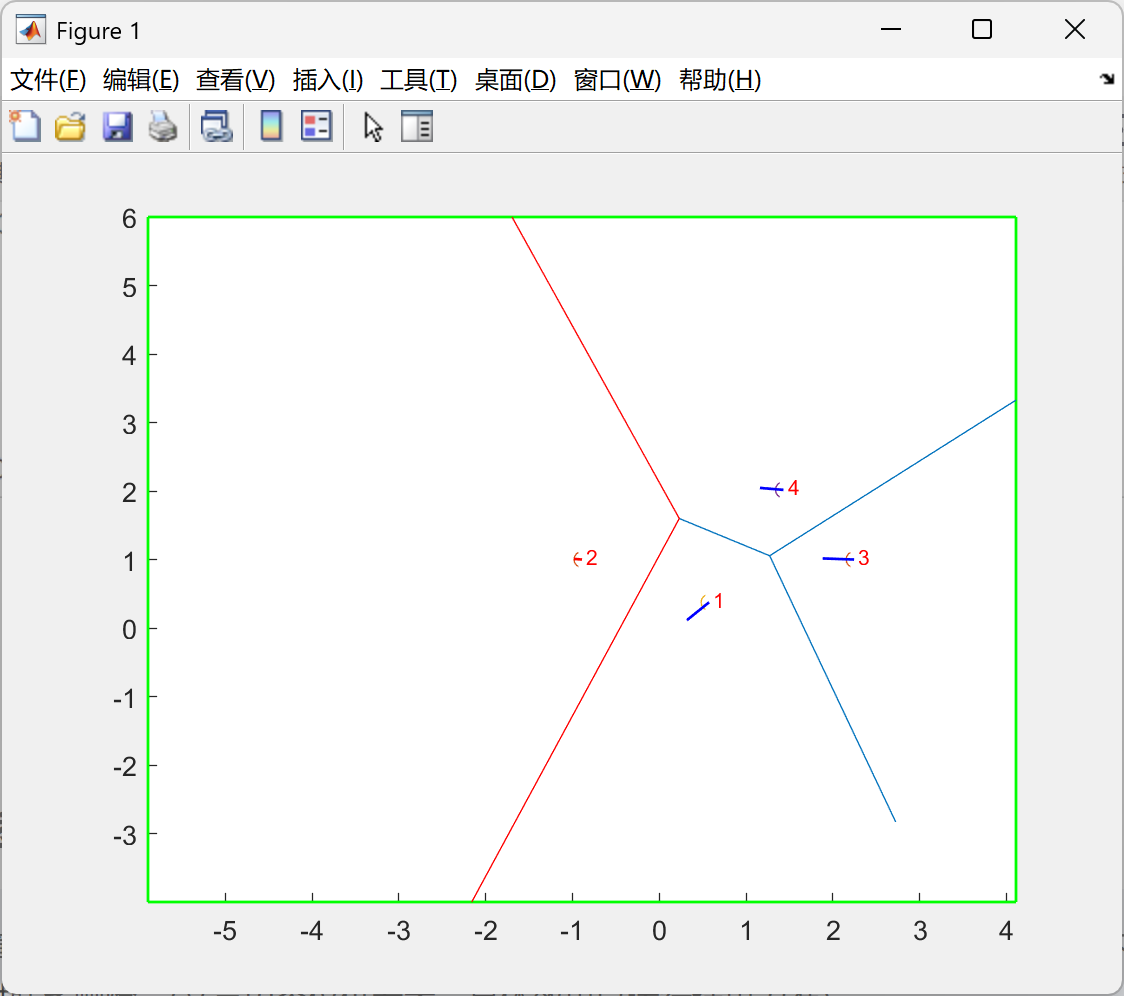
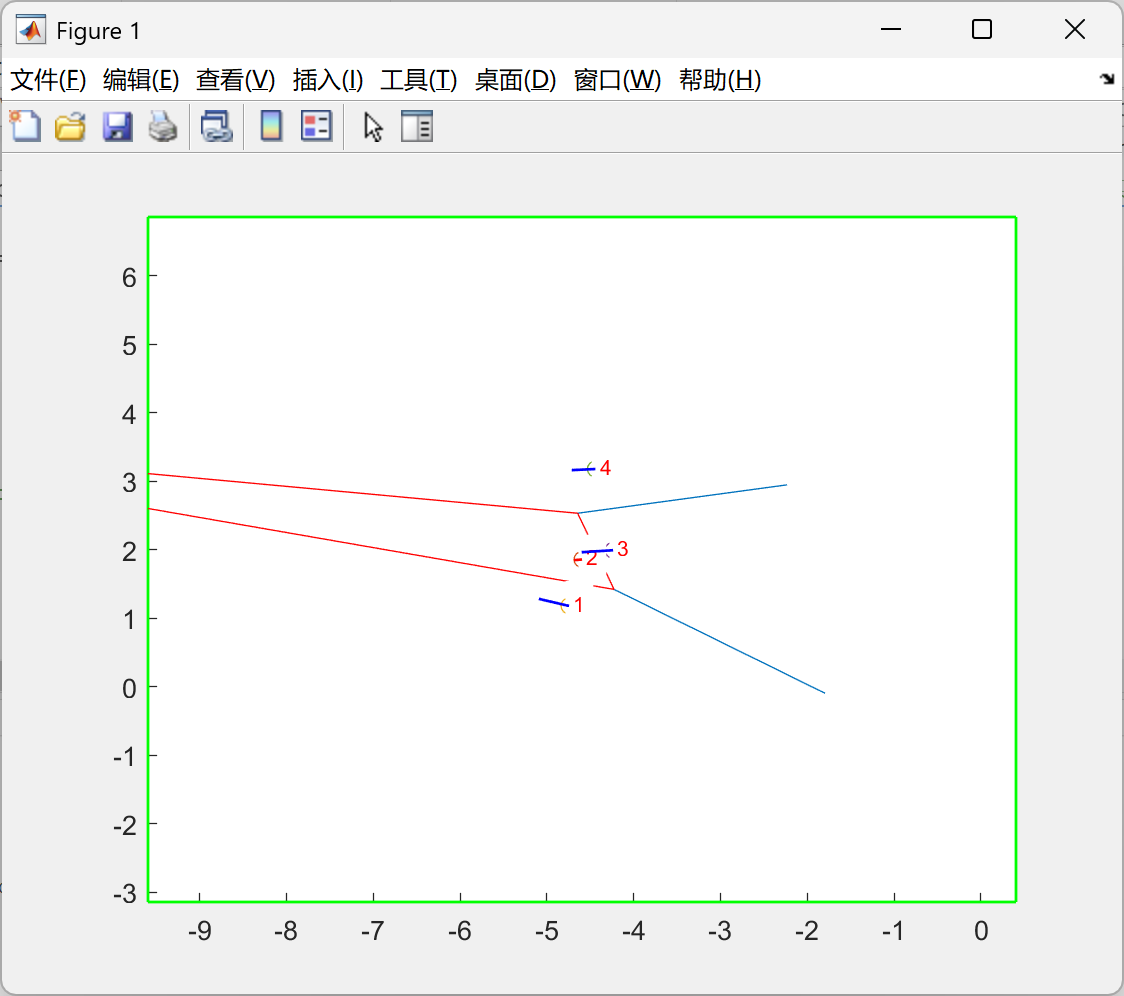
📚2 运行结果
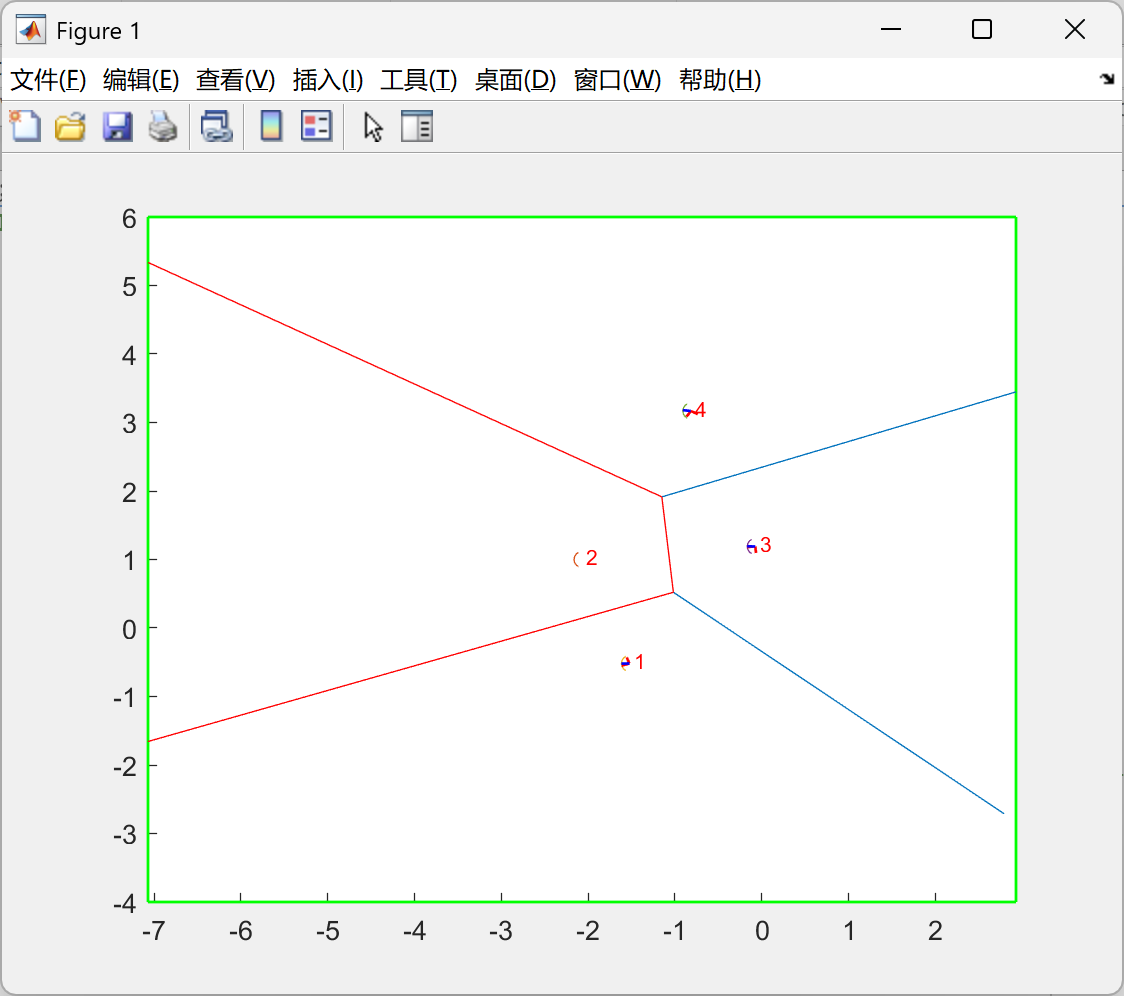
D2_动态有界_虚拟力场控制(VFC)_卡尔曼滤波(KF):
部分代码:
%% run algorithm
while ~captured(P, idx)
e = P(idx, :);
% e_vel = (e_path(T+e_step, :) - e_path(T-1+e_step, :)) * sample_f;
fov = [fov_rel(1:2) + e(1), fov_rel(3:4) + e(2)];
x_min_rel = fov_rel(1) + e(1); x_max_rel = fov_rel(2) + e(1); y_min_rel = fov_rel(3) + e(2); y_max_rel = fov_rel(4) + e(2);
% 给evador分配控制e_vel 给pursuer分配miustar
e_vel = virtualForceControl(P(idx, :), P([1:idx-1, idx+1:end], :), x_max_rel, x_min_rel, y_max_rel, y_min_rel);
e_vel = e_vel * e_slow_scale;
e_vel_pred = e_vel;
% 可以假设直接知道e_vel,也可以用别的方法预测当前时刻evador的速度
xk = KalmanFilter(sample_t, history.velocity, history.position);
e_vel_pred = xk(3:4);
[miu_star, vncomb] = voronoiShrink(P, idx, x_max_rel, x_min_rel, y_max_rel, y_min_rel, e_vel_pred, v_pre, sample_t, wmax, T);
% show result
hold on;
axis(fov);
plot_voronoi(vncomb, P, x_max_rel, x_min_rel, y_max_rel, y_min_rel);
for i = 1:size(P, 1)
% 在点坐标右上方偏移(0.1,0.1)处添加序号
text(P(i,1)+0.05, P(i,2)+0.05, num2str(i), ...
'FontSize', 8, ...
'Color', 'red', ...
'BackgroundColor', 'white', ...
'HorizontalAlignment', 'left');
end
for i = 1 : size(P, 1)
if i == idx
quiver(P(idx, 1), P(idx, 2), e_vel(1)*0.2, e_vel(2)*0.2,'LineWidth', 1, 'Color', 'r', 'MaxHeadSize', 0.1);
else
x0 = P(i, 1); y0 = P(i, 2);
u = miu_star{i}.*0.4;
quiver(x0, y0, u(1), u(2), 'LineWidth', 1, 'Color', 'b', 'MaxHeadSize', 0.1);
end
end
hold off;
% vertexs = [];
% for i = 1 : size(vncomb, 2)
% vertexs = [vertexs; vncomb(i).v1; vncomb(i).v2];
% end
% vertexs = unique(vertexs, 'rows');
% e_A = [e_A, polygonArea(vertexs)];
drawnow;
clf;
% 执行一步控制
for i = 1 : size(P, 1)
if i ~= idx
P(i, :) = P(i, :) + sample_t * miu_star{i};
v_pre(i, :) = miu_star{i};
else
e_step = e_step + 1;
e_step = mod(e_step, size(e_path, 1));
P(i, :) = P(i, :) + e_vel * sample_t;
v_pre(i, :) = e_vel;
end
end
history.velocity(end + 1, :) = e_vel; his_vel_plot(end+1, :) = e_vel; his_pos_pred_plot(end+1, :) = xk(1:2);
history.position(end + 1, :) = P(idx, :); his_e_pos_plot(end+1, :) = P(idx, :); his_vel_pred_plot(end+1, :) = xk(3:4);
refreshHistory(history);
his_all_pos_plot(:, end+1, :) = P;
T = T + 1;
end
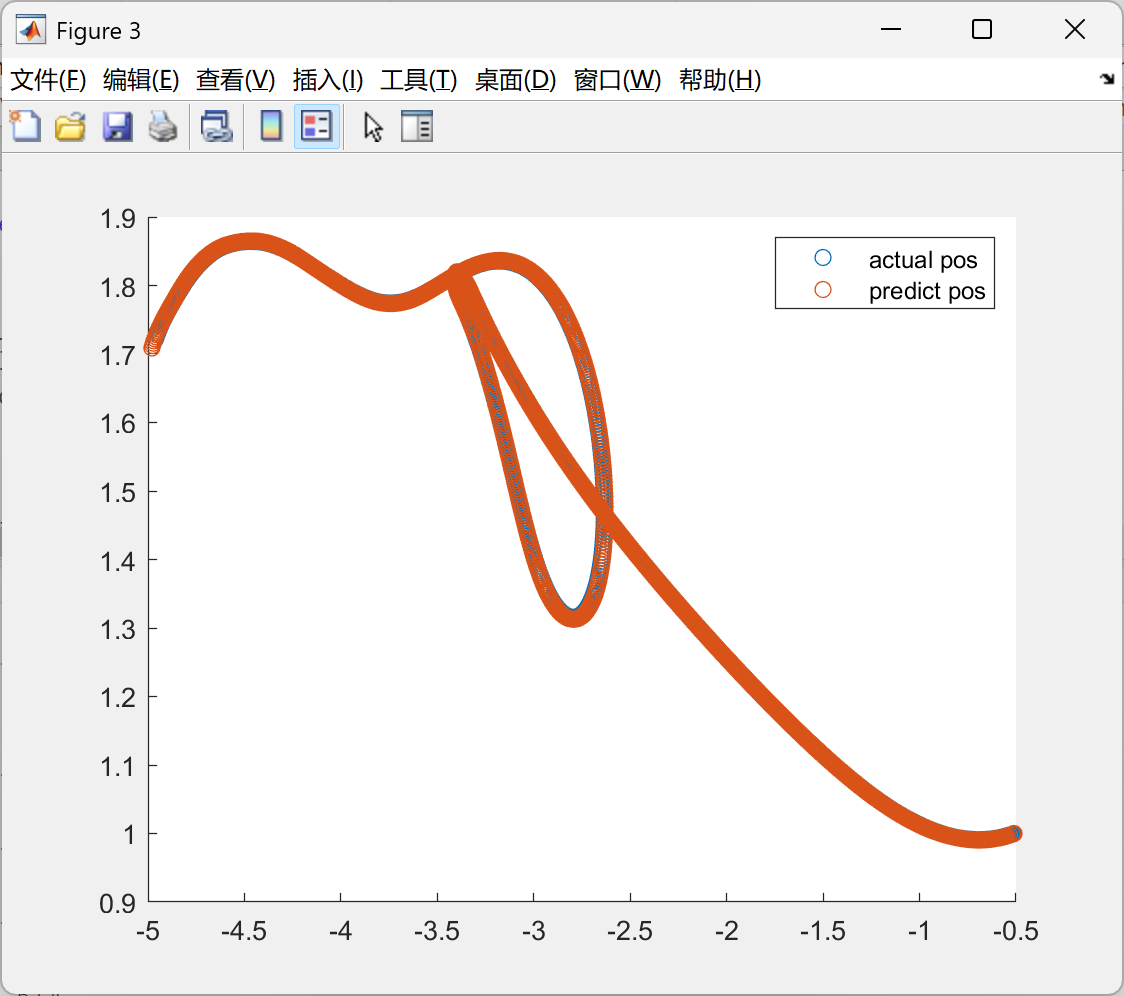
%% show kalman filter
figure(3);
hold on;
x = 1 : T;
scatter(his_e_pos_plot(3:end, 1), his_e_pos_plot(3:end, 2));
scatter(his_pos_pred_plot(:, 1), his_pos_pred_plot(:, 2));
% his_vel_plot = his_pos_plot * sample_t; his_pos_pred_plot
% quiver(his_pos_pred_plot(3:end, 1))
legend("actual pos", "predict pos");
hold off;
figure(4);
diff = his_vel_pred_plot - his_vel_plot(3:end, :);
diff_len = zeros(size(diff, 1), 1);
for i = 1 : size(diff, 1)
diff_len(i) = norm(diff(i, :));
end
plot(linspace(0, T*sample_t, size(diff, 1)), diff_len);
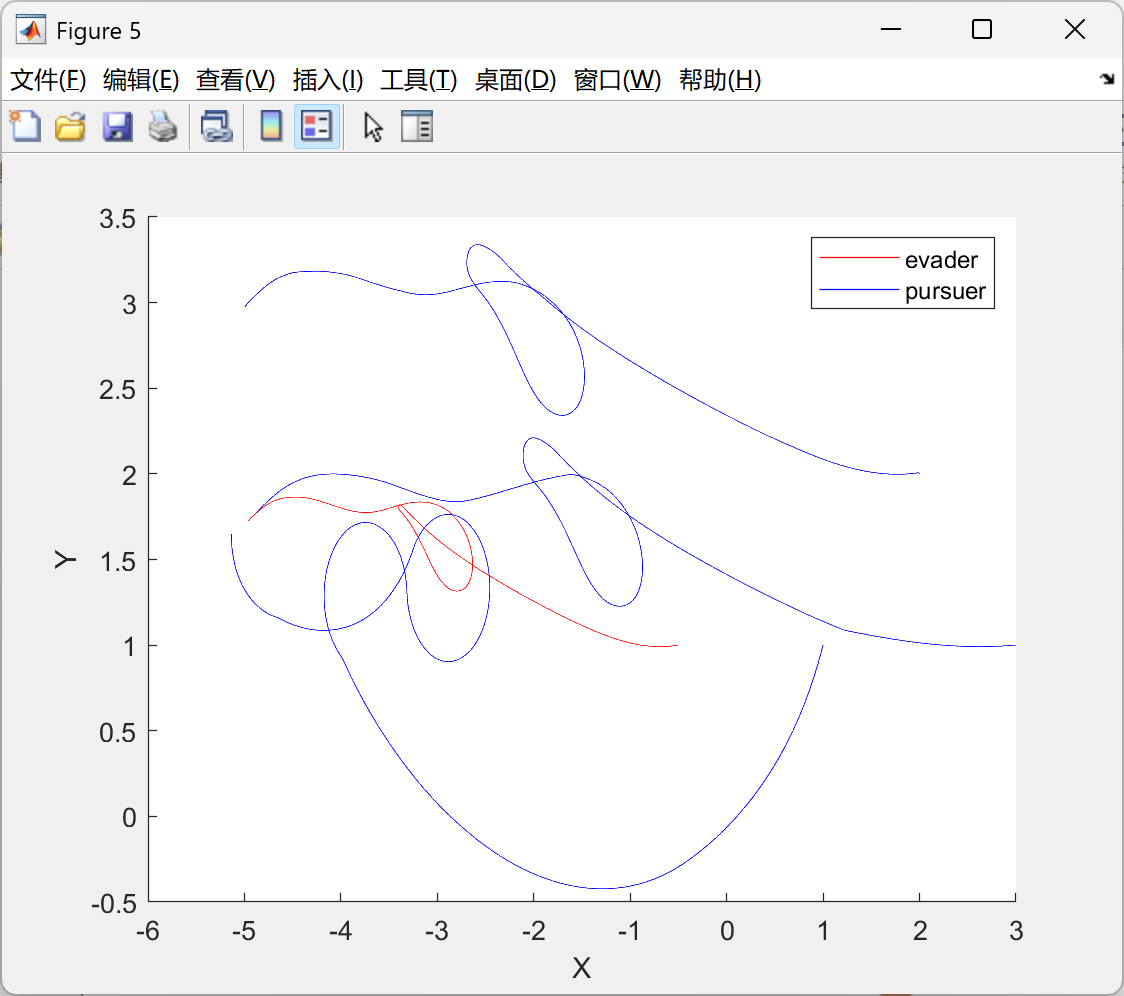
figure(5);
hold on;
ph1 = []; ph2 = [];
for i = 1 : size(P, 1)
if i == idx
color = 'red';
ph1 = plot3(his_all_pos_plot(i, :, 1), his_all_pos_plot(i, :, 2), linspace(0, T*sample_t, size(his_all_pos_plot, 2)), 'Color', color);
% legend(ph, 'evader')
else
color = 'blue';
ph2 = plot3(his_all_pos_plot(i, :, 1), his_all_pos_plot(i, :, 2), linspace(0, T*sample_t, size(his_all_pos_plot, 2)), 'Color', color);
% legend(ph, 'pursuer')
end
xlabel("X");ylabel('Y');zlabel('t');
end
legend([ph1, ph2], ["evader", "pursuer"]);
hold off;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取

更多推荐
 6
6 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)