
GPU计算效率提升:混合精度训练、并行优化、量化与VLLM实践
基于上述策略,丰语8B模型通过混合精度训练将显存占用从224GB降至80GB以内(A800单卡可承载),同时通过损失缩放和精度分层,保证预训练精度与FP32训练基本一致。并行优化通过“拆分模型或数据”,将大模型训练/推理任务分配到多GPU上执行,突破单卡显存与计算能力限制,核心分为四类并行方式。,在保证模型收敛精度的前提下,降低显存占用、提升计算吞吐量,解决大模型训练的硬件资源限制。将模型按层(或
目录
1. 混合精度训练
混合精度训练的核心是通过分层使用低精度(BF16/FP16)与高精度(FP32) ,在保证模型收敛精度的前提下,降低显存占用、提升计算吞吐量,解决大模型训练的硬件资源限制。
1.1 混合精度训练的背景:大模型显存需求
以丰语8B-base模型预训练为例,FP32精度下的显存占用远超单卡容量,成为训练瓶颈:
| 显存占用项 | 计算逻辑 | 显存大小(FP32) | 说明 |
|---|---|---|---|
| 模型参数 | 8B参数 × 4字节/参数 | 32GB | 模型核心权重存储 |
| 梯度 | 与模型参数同规模 | 32GB | 反向传播生成的梯度值 |
| 优化器状态(Adam) | 2×模型参数规模(动量+二阶矩) | 64GB | Adam优化器需存储额外状态 |
| 激活值 | 通常为参数规模的2-3倍 | 64-96GB | 与batchsize、序列长度正相关 |
| 总需求 | —— | 224GB | 单卡(如A800-80G)无法满足 |
| 需求 | 硬件限制 |
|---|---|
| 丰语-8B-base:224GB | 单卡显存(A800):80GB |
1.2 混合精度训练的硬件基础
NVIDIA A800的Tensor Core是混合精度计算的核心硬件支撑,专为低精度计算优化:
- 计算吞吐量:FP16/BF16 吞吐量达 192 TFLOPS,是 FP32(24 TFLOPS)的 8倍;
- 混合计算支持:通过 HMMA(混合矩阵乘法累加)指令,原生支持 FP16/BF16 与 FP32 的混合运算,兼顾精度与速度。
1.3 混合精度训练的难点:数值不稳定性
降低精度会导致数值范围缩小,引发三类核心问题:
- 梯度下溢:BF16/FP16的最小正值有限(如BF16最小正值为
1.17e-38),小梯度值会被截断为0,导致模型无法收敛; - 权重更新异常:精度损失累积会导致权重更新偏离最优方向,最终影响模型精度;
- 激活值溢出:Softmax、LayerNorm等操作中可能出现数值爆炸(如激活值超出低精度表示范围)。
1.4 混合精度训练的核心策略
1.4.1 精度分层策略
根据训练环节的精度需求,分层选择数据类型,平衡精度与效率:
| 训练环节 | 采用精度 | 选择原因 |
|---|---|---|
| 模型权重 | BF16 | 权重是模型核心参数,BF16精度足以保留关键信息 |
| 梯度 | BF16 | 梯度值通常比权重大1-2个数量级,配合损失缩放可避免下溢 |
| 优化器状态 | FP32 | 优化器(如Adam)需累积微小更新,FP32保证更新精度 |
| 前向激活值 | BF16 | 激活值为中间结果,低精度不影响最终收敛 |
1.4.2 损失缩放:解决梯度下溢
针对BF16/FP16梯度下溢问题,通过“放大损失-还原梯度”两步操作:
- 损失放大:将损失值乘以缩放因子(如1024),成比例放大梯度,确保梯度值落在低精度的有效表示范围内;
- 梯度还原:反向传播计算完成后,将梯度除以缩放因子,还原为真实梯度值,避免影响权重更新。
1.5 丰语大模型混合精度训练实践
基于上述策略,丰语8B模型通过混合精度训练将显存占用从224GB降至80GB以内(A800单卡可承载),同时通过损失缩放和精度分层,保证预训练精度与FP32训练基本一致。
2. 并行优化(DP/TP/PP/EP)
并行优化通过“拆分模型或数据”,将大模型训练/推理任务分配到多GPU上执行,突破单卡显存与计算能力限制,核心分为四类并行方式。
2.1 数据并行(Data Parallel, DP)
核心原理:“复制模型,拆分数据”
- 模型复制:将完整模型复制到每张GPU上,每张GPU持有一份模型副本;
- 数据拆分:输入数据按
batch维度平均分配到各GPU(如batch=128,4张GPU各处理32个样本); - 梯度同步:反向传播后,通过Ring AllReduce算法聚合所有GPU的梯度,统一更新所有模型副本,确保各副本参数一致。
优缺点与适用场景
- 优点:实现简单,无需修改模型结构;
- 缺点:存储冗余(每张GPU存完整模型),显存占用高;
- 适用场景:多机多卡训练、模型规模较小(单卡可容纳完整模型)的场景。
2.2 张量并行(Tensor Parallel, TP)
核心原理:“矩阵分块,并行计算”
张量并行的本质是将Transformer层中的矩阵运算(如QKV注意力、线性层)分块到多GPU,通过局部计算+通信聚合实现并行,突破单卡显存限制:
- 权重分块:
- Q/K/V权重矩阵(如
W ∈ R^(h×h))按列维度切分(如2张GPU,各持有W1 ∈ R^(h×h/2)、W2 ∈ R^(h×h/2)); - 线性层B权重矩阵按行维度切分,与前一步输出的分块矩阵匹配;
- Q/K/V权重矩阵(如
- 局部计算:各GPU用本地分块权重与输入数据做矩阵乘法,得到局部结果(如
Y1、Y2); - 结果聚合:通过Ring-AllReduce将各GPU的局部结果相加,得到完整矩阵运算结果(如
Z = Z1 + Z2)。
关键参数与适用场景
- Transformer层参数:
b(batchsize)、S(sequence_length)、h(hidden_size)、h'=4h(FFN层中间维度)、N(GPU数量); - 适用场景:大模型训练/推理(如7B、13B模型),单卡无法容纳完整Transformer层的场景。
2.3 流水线并行(Pipeline Parallel, PP)
核心原理:“按层切分,流水执行”
将模型按层(或多层组)切分到不同GPU,数据以流水线方式在GPU间流动,通过“微批次重叠”减少GPU空闲时间:
- 模型切分:将Transformer模型拆分为多个层组(如Layer1-4、Layer5-8),每个层组部署在一张GPU;
- 微批次拆分:将每个数据batch拆分为多个
Micro-batches(如batch=128拆分为8个Micro-batch=16); - 流水执行:前一个Micro-batch完成当前GPU层组计算后,立即传递到下一张GPU,同时当前GPU开始处理下一个Micro-batch,实现“计算-通信重叠”。
进阶优化:交错式流水线并行(PipeDream)
在微批次流水线基础上,让不同GPU交替处理forward与backward:
- 当GPU4完成Micro-batch1的forward后,立即执行其backward;
- 同时允许GPU1-3继续处理后续Micro-batch的forward,进一步减少“流水线气泡”(GPU空闲时间)。
适用场景:超大规模模型(如100B+),需跨多GPU切分模型层的场景。
2.4 专家并行(Expert Parallel, EP)
核心原理:“MoE架构+专家拆分”
基于混合专家模型(MoE),将模型中的FFN层替换为多个“专家网络”,通过门控分配样本到专家,实现并行:
- 门控计算:对输入样本
x,通过门控网络(权重矩阵W)计算样本分配到各专家的权重,经Softmax后取前k个(通常k=1或2)最大权重的专家; - 专家并行:
- 门控网络复制到每张GPU;
- 专家网络独立部署在不同GPU(如16个专家分布在4张GPU,每张GPU4个专家);
- 结果聚合:选中的
k个专家输出加权和,作为MoE层的最终结果。
优缺点与适用场景
- 优点:支持更多专家网络(数量与GPU数量正相关),提升模型容量;
- 缺点:需额外通信(样本分配与结果聚合);
- 适用场景:MoE架构模型(如GPT-4 MoE、Qwen-MoE),需通过多专家提升模型能力的场景。
3. 量化技术
量化通过将模型权重/激活值从FP32/BF16转换为低精度(如INT4、INT8),减少显存占用、提升推理速度,核心分为三类方法。
3.1 预训练后量化(Post-Training Quantization, PTQ)
核心流程:训练后校准量化
无需重新训练,通过“校准数据集统计分布”确定量化参数,实现低精度转换:
- 数据校准:用少量校准数据集(如100-1000个样本)前向传播,统计模型权重和激活值的分布(如最小值、最大值、均值);
- 量化参数计算:根据分布确定量化参数——
scale(缩放因子)和zero_point(零点),将浮点数映射到整数范围; - 低精度转换:用量化参数将权重/激活值转换为低精度(如INT4/INT8)。
量化粒度
根据分组粒度不同,平衡精度与效率:
- Per-tensor:整个张量共享一个
scale和zero_point,速度快但精度损失大; - Per-channel:按张量的通道维度分组(如QKV权重的每个头为一个通道),精度高但计算稍复杂;
- Per-group:按自定义分组(如128个元素一组),兼顾精度与速度;
- Per-token:按输入token维度分组,精度最高但计算开销大。
3.2 激活感知量化(Activation-Aware Quantization, AWQ)
核心思想:“保留关键权重,降低精度损失”
通过分析激活值对权重的影响,仅对“非关键权重”量化,核心权重保留高精度:
- 激活值统计:前向传播计算所有层的激活值,记录每个权重对应的激活值分布(均值、最大值、绝对值之和);
- 关键权重筛选:计算权重分数(
权重值 × 激活值绝对值之和),按分数排序,选取前0.1% 的权重作为“关键权重”; - 混合精度量化:
- 非关键权重:采用INT4量化(Per-group粒度);
- 关键权重:保留FP16精度,避免影响模型输出。
精度表现
- Qwen2.5-7B模型:INT4 AWQ在MMLU任务上准确率74.8%,仅比FP16低1%;
- Qwen2.5-72B模型:INT4 AWQ精度损失<2%,兼顾显存与精度。
3.3 梯度优化量化(GPTQ)
核心思想:“梯度下降调整量化参数”
通过梯度计算权重对模型输出的影响,针对性优化量化参数,控制精度损失:
- 误差评估:计算每个权重对模型输出的贡献(梯度),确定权重的“重要性”;
- 差异化误差控制:
- 重要权重(如Q头权重):量化误差控制在0.02以内;
- 非重要权重(如FFN层权重):量化误差放宽到0.05;
- 分组量化:
group_size与模型头维度一致(如Qwen3的head_dim=128),每个分组共享一个scale,平衡精度与速度。
4. VLLM实践
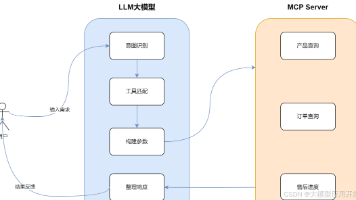
VLLM(Very Large Language Model Serving)是大模型推理优化框架,通过KV缓存、张量并行等技术提升推理效率,以下为具体应用与参数调优实践。
4.1 VLLM在AI寄件场景的应用案例
4.1.1 推理请求参数优化:降低网络与显存开销
- 存储优化:将图片预先转存至火山云VEPFS(分布式文件系统),供多个算法共享,避免重复传输;
- 读图优化:修改VLLM源码,支持直接从VEPFS读取图片,替代base64编码传图,减少网络带宽占用(base64传图会增加30%+带宽开销)。
4.2 VLLM参数调优思路(以AI寄件为例)
4.2.1 生成token数限制:避免无效资源占用
根据业务场景限制模型生成token数,防止输出循环或冗余:
- 意图识别模型:SFT后仅输出1个字母(如“A”“B”),
max_token=1; - 实体抽取模型:根据实际抽取需求,
max_token=64(足够覆盖地址、手机号等实体)。
4.2.2 采样参数优化:平衡稳定性与多样性
根据模型特性与业务需求调整采样参数:
- Qwen系列模型(SFT后):意图分类、实体抽取需稳定输出,设置
temperature=0、top_k=1; - DeepSeek R1模型:原生模型易输出循环,设置
temperature=0.7,提升多样性。
4.2.3 图像预处理参数优化:减少输入token
针对多模态模型(如Qwen2.5-VL),优化图像输入以降低token数:
- 图像像素限制:AI寄件场景输入为手机照片,限制最大像素数为2000万(与多数手机默认像素匹配),减少图像编码后的token数;
- 切分数量控制:InternVL系列模型针对分类任务,设置图片切分数量=1(仅输入缩略图),避免多切分增加token。
4.2.4 KV缓存与并行优化:提升并发能力
- KV缓存预分配:根据输入输出token数设置
max-model-len(AI寄件场景max-model-len=10240),降低单请求KV缓存占用,支持128并发请求; - 并行方式选择:7B模型单卡推理性能满足需求,优先“扩实例”而非TP/PP,提升并发能力;
- 长输入优化:开启
enable-chunked-prefill,将长输入(AI寄件平均5000+ token)的prefill阶段打散,缓解decode阶段阻塞。
4.3 VLLM在长文本场景的参数调优
针对长文本输入/输出场景(如多轮对话、长文档理解),关键参数设置:
--gpu-memory-utilization 0.85:预分配GPU显存上限为85%,预留缓冲区避免显存溢出;--quantization awq:使用AWQ量化,减少显存占用(INT4比FP16显存占用降低75%);--kv-cache-dtype fp8:KV缓存用FP8精度,平衡显存与精度;--enable-prefix-caching:复用多轮对话中相同前缀的KV缓存,减少重复计算。
更多推荐
 8
8 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)