
【机器人路径规划】基于6种最新算法(小龙虾优化算法COA、MSA、RTH、NOA、BFO、SWO)求解机器人路径规划研究附Matlab代码
机器人路径规划是机器人领域的核心研究方向之一,旨在为机器人在复杂环境中寻找一条从起点到目标点的无碰撞最优路径。
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
机器人路径规划是机器人领域的核心研究方向之一,旨在为机器人在复杂环境中寻找一条从起点到目标点的无碰撞最优路径。基于小龙虾优化算法 COA、MSA、RTH、NOA、BFO、SWO 这 6 种算法求解机器人路径规划的研究背景如下:
机器人应用场景复杂化
随着机器人技术的发展,其应用场景从结构化工厂环境向非结构化动态场景拓展,如灾害救援、物流仓储、无人机巡检等。这些场景中存在大量动态障碍物、高维空间约束和复杂地形,对机器人路径规划的实时性、准确性和适应性提出了更高要求。
传统路径规划方法的局限性
传统路径规划算法,如 A * 算法、Dijkstra 算法等,在静态环境中表现良好,但在动态或高维场景中存在计算复杂度高、实时性差、易陷入局部最优等问题。而模拟退火、人工势场法等传统方法则存在收敛速度慢、路径冗余等缺陷。因此,需要新的算法来应对复杂环境下的路径规划任务。
仿生智能算法的兴起
近年来,仿生智能算法凭借模拟自然生物群体行为的特性,在非线性优化问题中展现出更强的全局搜索能力与环境适应性,成为机器人路径规划领域的研究热点。小龙虾优化算法 COA、MSA、RTH、NOA、BFO、SWO 等新兴智能优化算法相继被提出,它们通过群体智能和随机搜索机制,能够更高效地处理复杂约束,为机器人路径规划带来了新的思路和解决方案。
![]()
⛳️ 运行结果
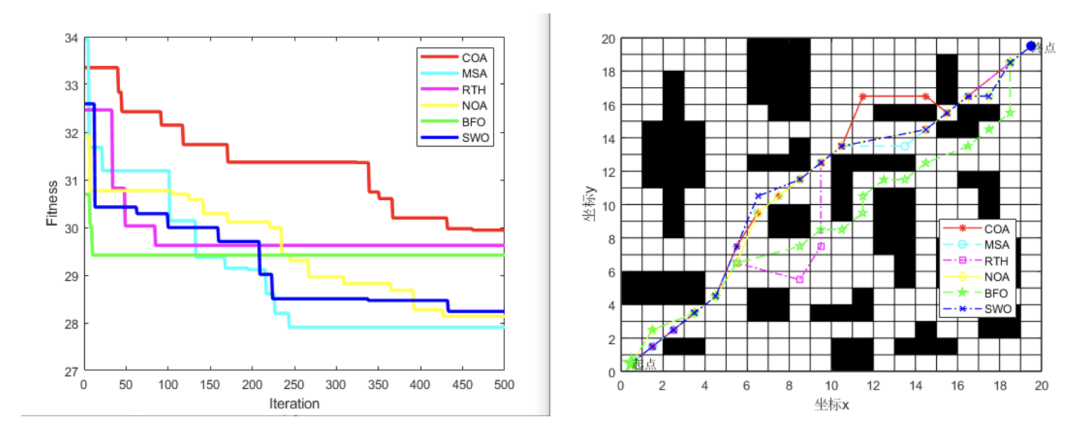
x
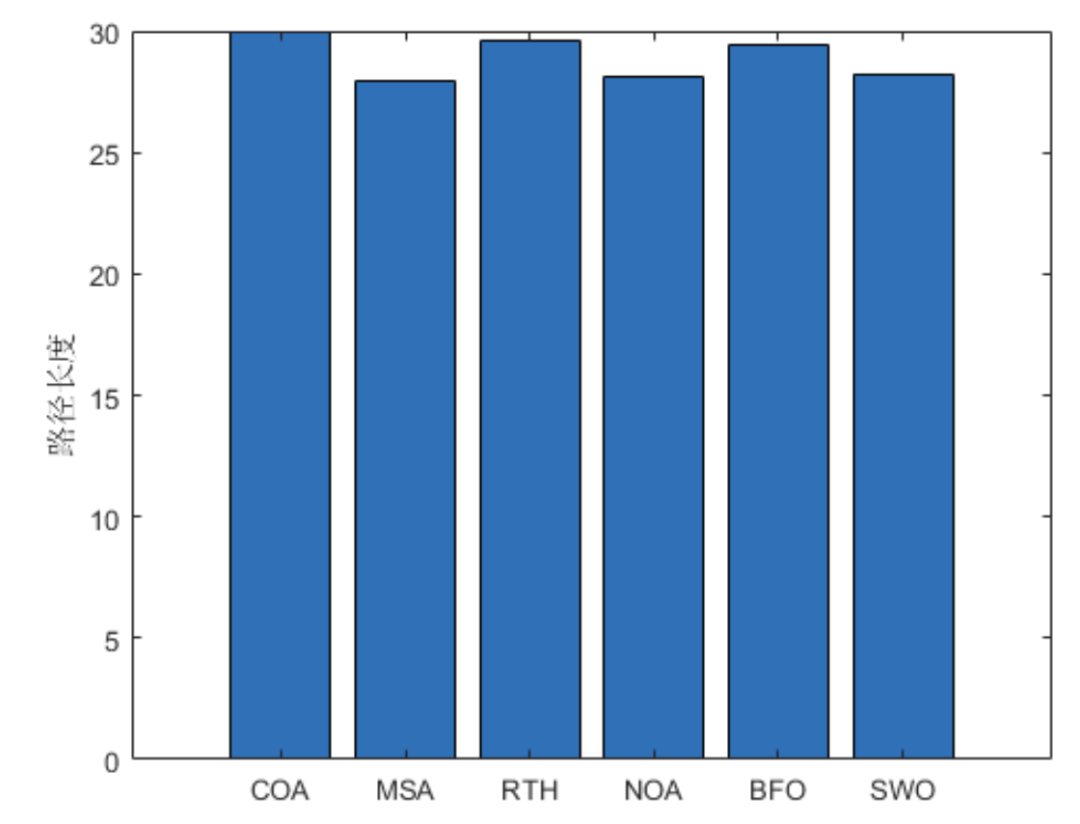
![]()
📣 部分代码
![]()
🔗 参考文献
[1] Rani R R , Ramyachitra D .Multiple sequence alignment using multi-objective based bacterial foraging optimization algorithm[J].Bio Systems, 2016, 150:177-189.DOI:10.1016/j.biosystems.2016.10.005.
![]()
🍅往期回顾扫扫下方二维码
![]()

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)