自动驾驶中的传感器技术29——Lidar(4)
激光雷达光学系统核心部件及应用分析 摘要:本文系统介绍了激光雷达光学系统中的关键部件及其特性。分轴和同轴光路设计各有优劣,分轴存在近场盲区但成本低,同轴无盲区但结构复杂。重点分析了准直镜(FAC/SAC)、分束器、扩散片、滤光片等核心光学元件的工作原理和技术指标。其中,FAC/SAC可有效改善激光器光束质量;窄带干涉滤光片需满足超窄带宽(<1.5nm)和高透过率(>90%)要求;扩散片
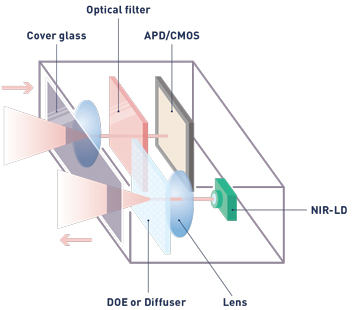
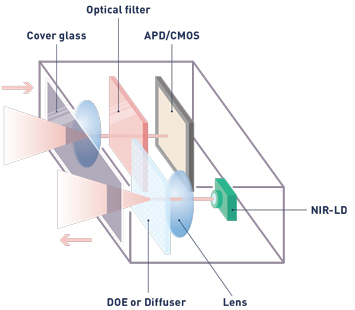
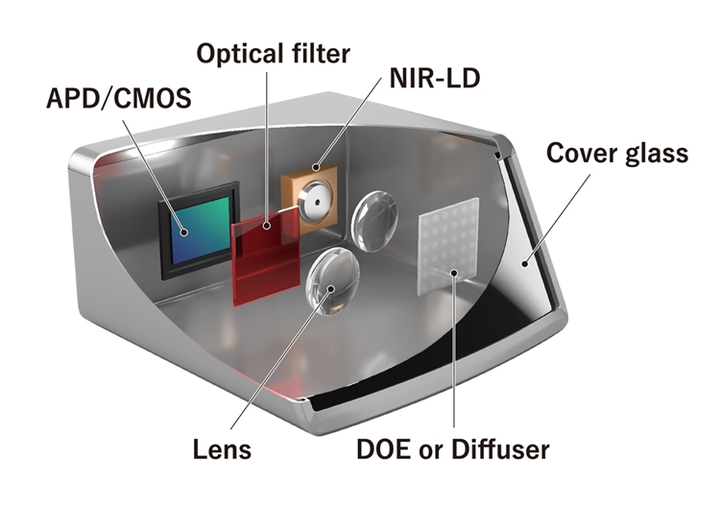
1、Lidar中的光学路径
分轴光路,发射光路和接收光路使用各自的透镜,它的缺点是探测范围无法完全覆盖近场,FOV 内存在一定的近场盲区。
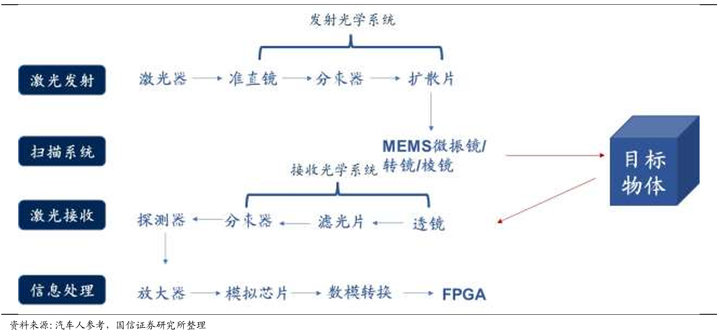
同轴光路则是收发公用一组透镜,使得发射光出去是平行,接收光汇聚到探测器,也易于对光路进行校准,无近场盲区。缺点是成本稍高,内部结构稍复杂一点,而且成像清晰程度也比单独的分轴成像要差。
光学器件的各种排布组成了上述的光路,本章节主要介绍光路上的光学器件。
2、准直镜 Collimators (FAC) for LiDAR
2.1 Fast Axis Collimators (FAC) for LiDAR
准直激光器快轴方向的光斑
非柱面透镜或非球面柱面透镜表面
可定制高端玻璃材质,性能逼近衍射极限
抗反射、低吸收率膜系适用于高功率应用,大数值孔径可保证准直后的光束质量
优秀的光透过率和准直效率
光纤激光器采用掺杂的玻璃光纤作为增益介质,利用光纤耦合半导体激光器作为泵浦源,通过谐振腔激发出激光。
光纤激光器泵浦源的核心元器件包括: • 预制金锡氮化铝衬底材料,以其热导率高,热膨胀系数与芯片匹配,可靠性高等优势被广泛应用于激光二极管芯片的封装; • 快轴准直镜(FAC)等,为泵浦源光束准直提供基础、高效的解决方案; • 聚焦透镜,可将准直、合束后的光斑精准耦合至泵浦源输出光纤。
2.2 Slow Axis Collimators (SAC) for LiDAR
准直激光器慢轴方向的光斑
常规慢轴准直镜、一体化柱面透镜阵列、全新蓝光弯月型慢轴准直镜可供选择
低曲率差
基于晶圆技术的高光学一致性
可自由选择高品质玻璃材料
高透射,准直,高转换效率
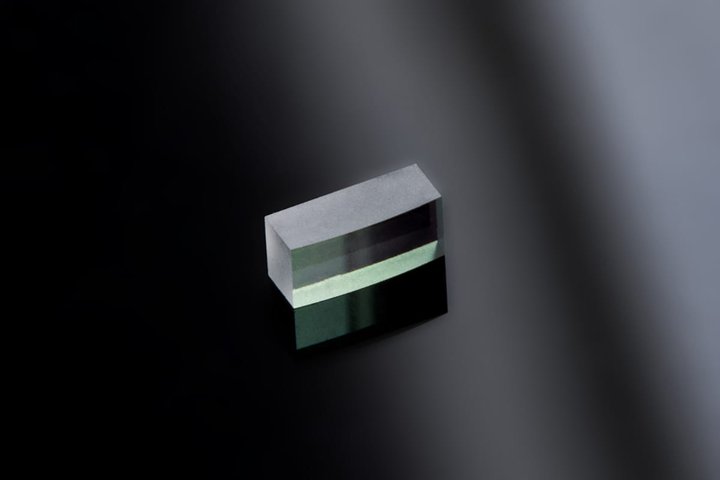
2.3 一体化准直器
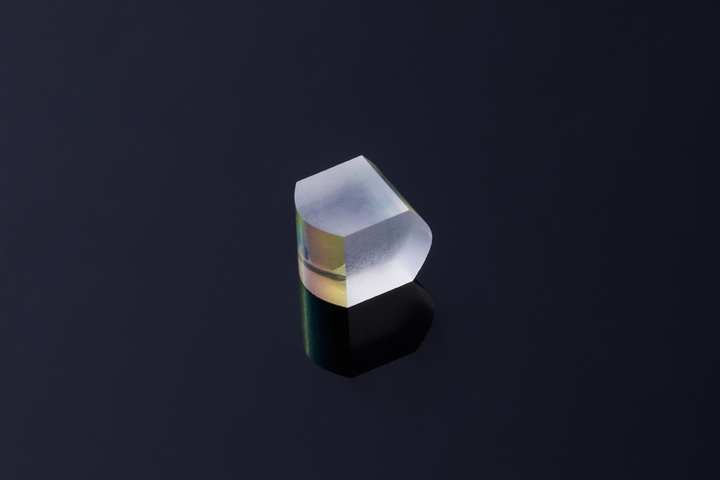
一体化准直器由正反两面具有不同焦距,相互交叉的圆柱形一体化玻璃块组成
可同时准直光束的快轴和慢轴
通过准直单个发射器发射出的光快慢轴,生成对称光束,且呈现近乎圆形的远场剖面。
此光学元件适用于对蓝色光谱范围内的单个发射器进行光束准直。
2.4 应用小结
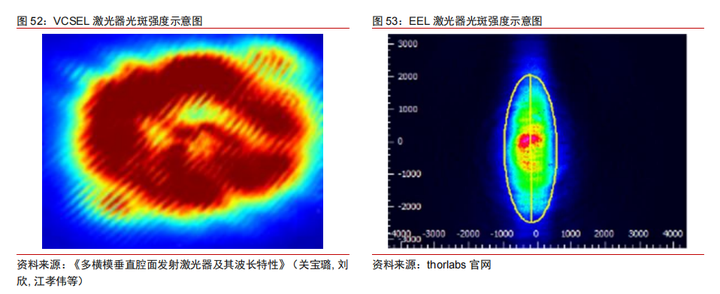
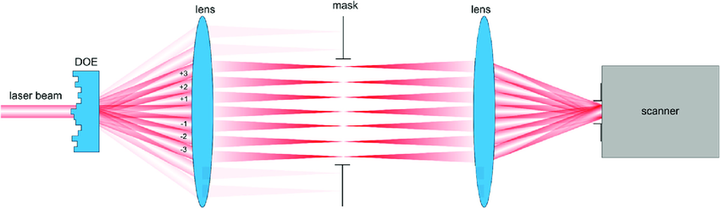
半导体激光器由于谐振腔的筛选能力不够强,还存在光束质量问题,也就是光 斑的强弱分布不均(存在多横模),且在主要光斑周围还有少量剩余能量(拖尾效应),所以有时也需要进行调整。针对拖尾问题,经常采用光阑将主光斑之外的少量光束舍弃。
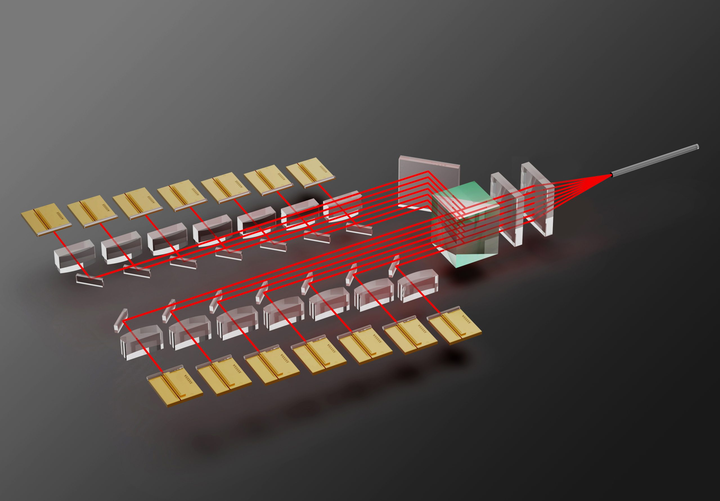
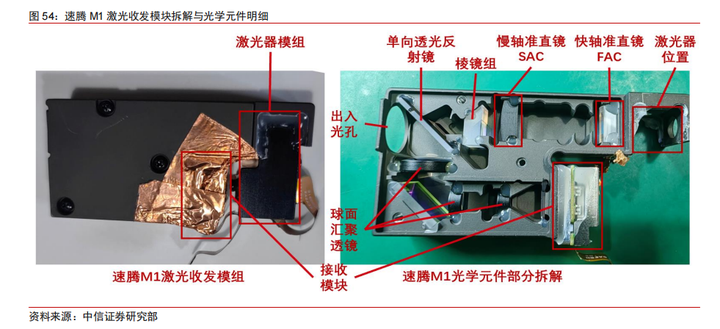
针对EEL激光器,通常需要在发光界面后立刻使用柱面透镜进行快轴准直,如此可以用最小的透镜面积节约成本,例如速腾M1是在每个激光器后紧跟一个快轴准直。在进行快轴准直后,通常会再进行一次慢轴准直。经过两次准直后激光将具有较好的直线性。
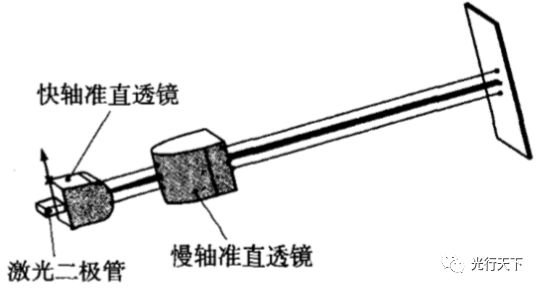
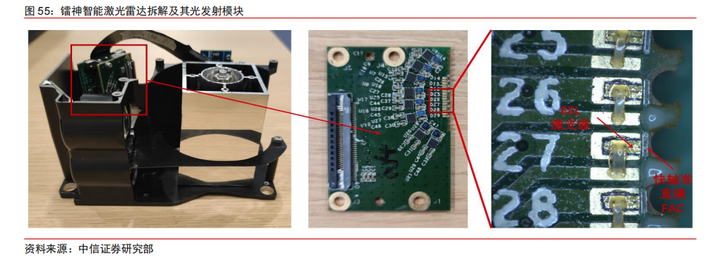
镭神智能的一款激光雷达发射模组中采用8个EEL激光器,在每个激光器的出光口直接安装1个快轴准直镜,体积更小,仅有亚毫米尺度,肉眼基本无法直接分辨。
而针对光学校准,1550nm路线再次展现了其优势。由于1550激光雷达使用光纤激光器,而光纤(通常使用单模光纤)本身就具有极强的光学校准能力,因此1550nm激光器的光束质量较高,输出的几乎是完美的圆形高斯光斑。同时其发散角也较小,根据武汉理工大学张睛等人的研究,圆光纤的发散角只有6度多,通常只需要在光纤后加一个普通的球面凸透镜即可。
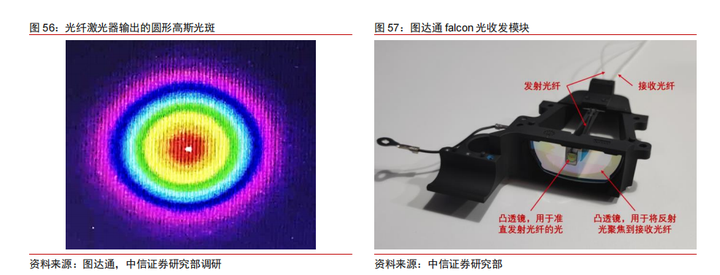
此外,对于绝大多数激光雷达,在接收光路上通常都需要用凸透镜进行光线汇聚,将从目标处反射回来的平行光汇聚在接收器所在的较小面积上。对于部分短距离flash激光雷达,准直需求将变为光场强度均匀化以及光束视场角扩大的需求,因此会对光场匀化器、光束扩散器等光学元件产生需求。
3、分束器 Beam Splitter
衍射激光分束器简称分束器(Beam Splitter)又叫做激光分束镜,激光分光镜,分光片,光束分束器。
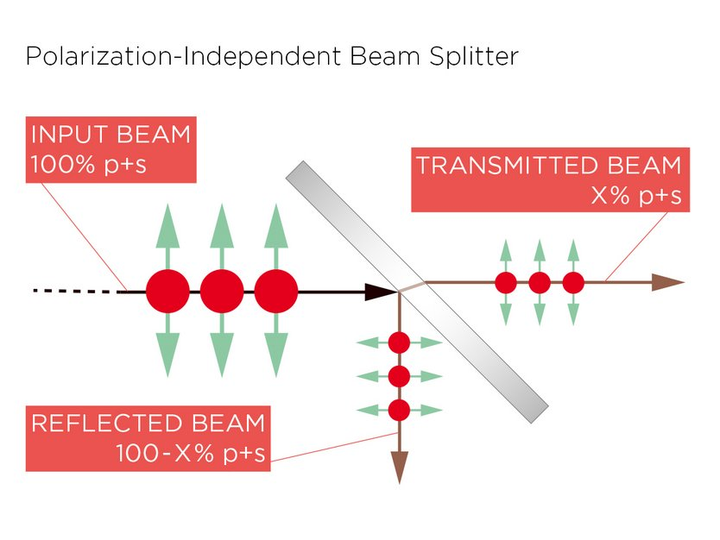
基本原理
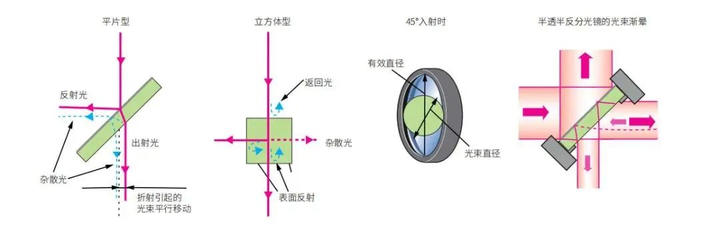
• 分光镜是基于光的折射和反射原理工作的光学元件。它通常由玻璃或其他光学材料制成,表面镀有特殊的光学薄膜。
• 当一束光入射到分光镜上时,根据光的波动理论,光在两种不同介质(分光镜材料和周围介质)的界面上会发生反射和折射现象。
• 对于未镀膜的分光镜,其反射和折射光的比例由两种介质的折射率决定。例如,当光从空气(折射率约为1)进入玻璃(折射率一般在1.5左右)时,会有一部分光反射,一部分光折射进入玻璃。
镀膜原理
• 为了实现特定的分光比(反射光和折射光的比例),分光镜表面会镀上多层光学薄膜。这些薄膜的厚度通常是光波长的四分之一的奇数倍。
• 通过控制薄膜的材料(如氟化镁、二氧化钛等)和厚度,可以改变光在薄膜层间的干涉效果。当光在薄膜层间反射和折射时,特定波长的光会由于干涉相长或相消而被增强或减弱,从而实现对不同波长光的分光功能。
• 例如,在一个50%反射、50%透射的分光镜中,镀膜的设计使得在特定波长下,反射光的强度和折射光的强度大致相等。
分光镜的功能
1. 分光功能
• 分光镜最主要的功能是将一束光分成两束或多束具有特定比例的光。这包括将一束光分成反射光和透射光两部分,或者在更复杂的设计中,将光分成多个不同方向和强度的光束。
• 例如,在光谱分析中,分光镜可以将复合光(如太阳光)分解成不同波长的单色光,便于对光的成分进行分析。
2. 波长选择功能
• 可以根据需要选择特定波长的光。通过设计合适的镀膜,分光镜可以反射或透射特定波长范围的光,而对其他波长的光则有不同的处理方式。
• 这在激光技术中应用广泛,例如在激光谐振腔中,分光镜可以作为输出耦合镜,只允许特定波长和强度的激光输出,同时将其他波长的光反射回腔内继续振荡。
3. 光束转向功能
• 分光镜可以改变光束的传播方向。在一些光学仪器中,通过合理布置分光镜,可以将光束引导到不同的光路中,实现光信号的多路传输或处理。
4、扩散片 Diffuser
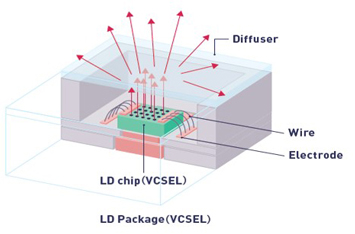
扩散片又称作扩散器、匀光片、匀化镜、光场匀化器 、Beam Homogenizer、Optical Diffuser、Beam Transformation System。其作用是将入射激光转化成任意形状尺寸的强度均匀的光斑。将激光束扩散成一个圆锥形,可以使激光雷达接收到更多的反射光,从而提高激光雷达的探测范围。
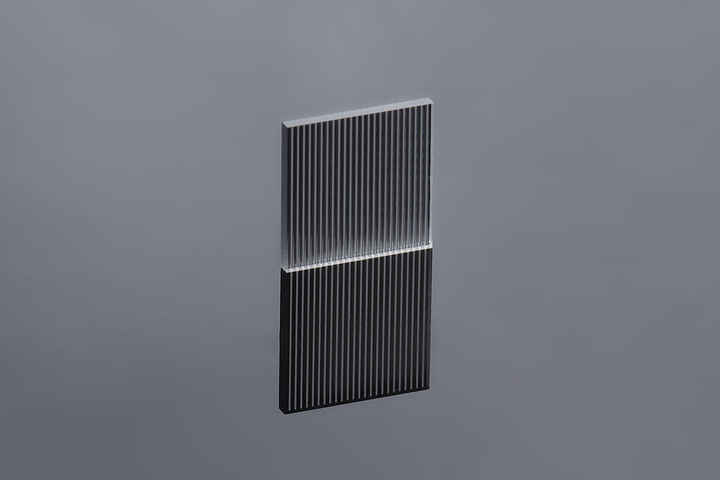
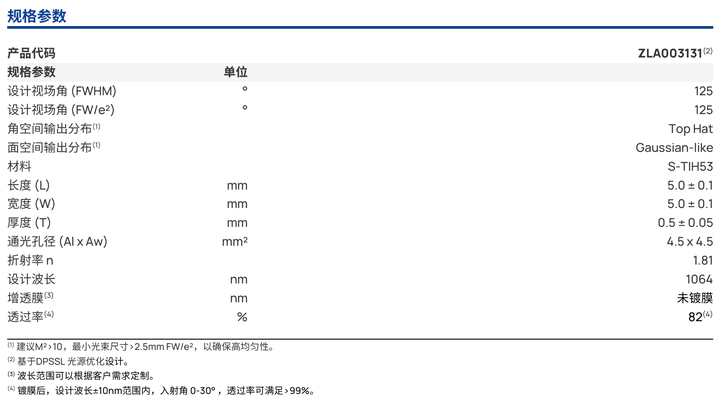
广角光束扩散器使用高折射率玻璃材质,可将激光光束在单个方向上扩散,视场角可达160°
使用折射光学元件(ROE)技术,无零级衍射,无热点
光透过率 > 95%(镀膜产品),光斑均匀度高达 90%
仅需4个LiDAR系统即可360°覆盖周边景观,保证驾驶安全。
Wide Angle Diffusers (WAD) for LiDAR
5、滤光片 Filter
LiDAR激光雷达主要借助发射红外波段的LED或半导体激光器,反射回来的光信号通过LiDAR激光雷达滤光片(905nm滤光片/940nm滤光片/1550nm滤光片)消除或过滤掉杂散光,确保传感器(芯片)收到的光信号精准无误,以免出现失真以及信号乱码等问题实现应用场景里的。
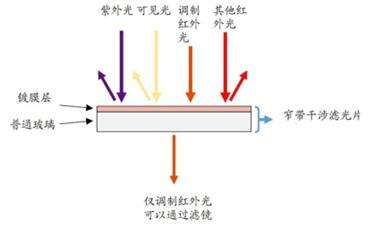
尽管可以使用各种不同的滤波技术来隔离返回信号,但大多数激光雷达系统都采用薄膜干涉滤光片,因为它们具有固有的耐用性,不需要维护或校准。这是一个重要的考虑因素,因为许多激光雷达传感器安装在卫星、飞机、无人机、自动驾驶汽车和其他平台上,这些平台要求传感器在恶劣的环境条件下运行,几乎不需要维护。
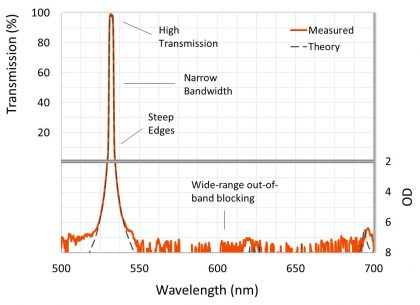
由于激光雷达返回信号的精确性,大多数激光雷达滤光片都是超窄带薄膜干涉滤光片。这些滤波器必须能够在超窄带宽上实现高传输,以隔离返回信号,并在大波长范围内实现带外阻断,以衰减阳光和其他外来光(下图)。然而,有许多不同类型的激光雷达系统,每种系统都需要特定应用的滤波器要求,以最大限度地提高信噪比。例如,激光高度计通常要求超窄带干涉滤光片在全宽半值(FHWM)下小于1.5 nm,同时在激光波长下实现90%以上的透射率,在~300-1300 nm范围内实现大于OD6(-60dB或0.0001%的透射率)的带外阻断。另一方面,拉曼激光雷达滤光片必须具有极其陡峭的边缘,以便将拉曼信号传输到探测器,同时将激光波长下较强的弹性反向散射信号阻挡到OD8的水平(-80dB或0.000001%的透射率)。
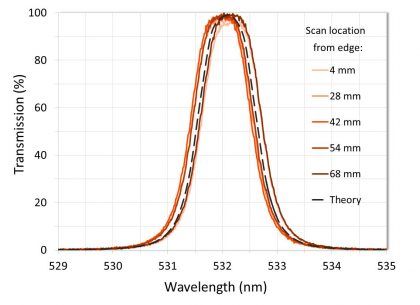
激光雷达系统还要求滤光片的薄膜涂层必须尽可能均匀。当均匀性不受控制时,薄膜层厚度在滤光片表面上变化,导致滤光片光谱在透明孔径上的位置相关波长偏移。如果将均匀性不受控制的滤波器集成到激光雷达系统中,大量激光雷达返回信号最终将被滤波器阻挡,无法到达探测器。均匀性控制的薄膜涂层将确保目标信号不会被滤波器阻挡。
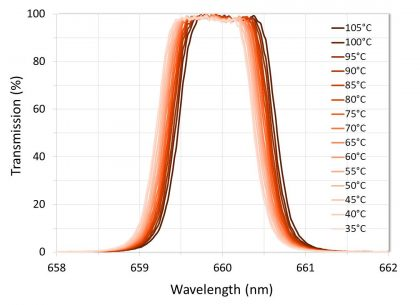
此外,激光雷达滤波器的设计还必须考虑到传感器平台和环境条件。空中和地面激光雷达系统在-40°C至+105°C的温度范围内工作,而卫星激光雷达的工作范围取决于卫星的轨道和热控制系统。因此,任何集成到在极端温度下运行的系统中的干涉滤光片都应该设计为尽量减少温度相关的波长偏移。
Ref:Thin-Film Interference Filters for LIDAR - Alluxa
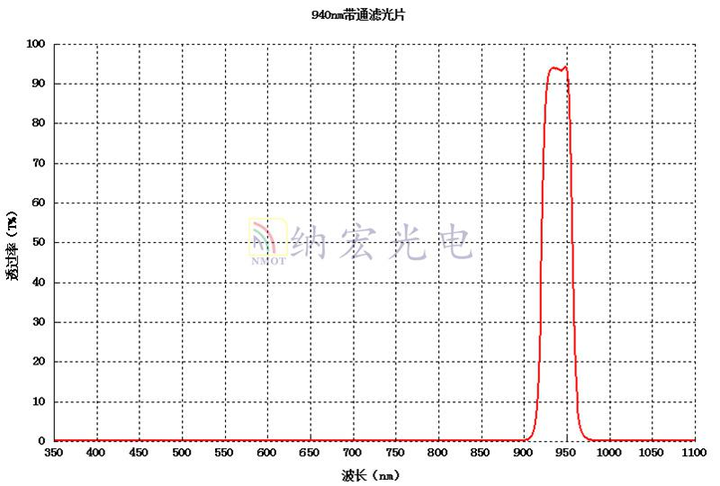
某940nm滤光片技术特点
1.进口超薄光学玻璃,透高度高、光洁度好、厚度公差小、平整度良好等光学特性。保证产品的稳定性和一致性品质保证
2.采用进口日本光驰镀膜设备离子溅射镀膜工艺,具有膜层劳固度高,截止深度均匀,中心波稳定性能强等特点
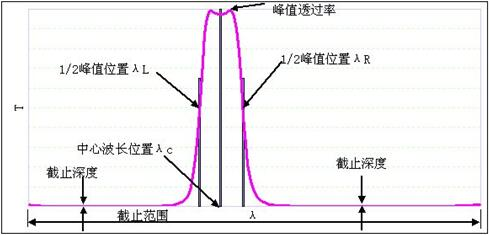
带通滤光片最大透射比的一半所对应的波长λ1和λ2之差(λ1-λ1)nm称为半宽度。短波截止波长是在峰值短波侧,透射比等于零的波长。长波截止玻长是在峰值长波侧,透射比等于零的波长,有些品种,在长波侧玻璃透射比达不到零,则以某一波长的透射比表示。
中心波长:940+/-5nm
入射角 :0°
半峰值带宽 :40nm
峰值透过率 :>90%( 按客户需求)
产品尺寸 :3mm-80mm( 可订制 )
截止波长 :200nm-1100nm( 按客户需求A )
截止深度 :>OD3-OD6 UV-NIR
产品材质 :光学级别类玻璃( K9,BK7,B270,D263T,JGS1,颜色玻璃,浮法玻璃等 )
表面光洁度 :国标三级,美军标60-40
技术原理如下
设计一款窄带滤光片需要考虑的参数有中心波长、带宽、峰值透过率、截止范围、截止率、入射角度、波纹指标、前后沿陡度及宽度比。确定这些参数后,则进行光学基片、镀膜材料、镀膜方式的选择。按照结构的不同可将其分为法布里-珀罗型(F-P)滤光片、多腔滤光片和诱增透滤光片。因为由它获得的透过光谱带都比较窄,所以又叫窄带干涉滤光片。
窄带滤光片的薄膜一般由低折射率和高折射率的两种膜组成,叠加后层数达几十层,每一层薄膜的参数漂移都可能影响最终性能。而且窄带滤光片透过率对薄膜的损耗非常敏感,所以制备峰值透过率很高、半带宽又很窄的滤光片非常困难。制备薄膜的方法有很多种,包括化学气相沉积、热氧化法、阳极氧化法、溶胶凝胶法、原子层沉积(ALD)、原子层外延(ALE)、磁控溅射等,而不同方法制备的薄膜性能差异很大。
6、反射镜 Mirror
6.1 反射镜(平面镜型)
镀铝反射镜,镀金反射镜,介质反射镜,金属加介质反射镜。金属膜反射镜在最宽的光谱范围内具有高反射率,而宽带电介质膜反射镜的工作波长范围更窄,平均反射率高于99%。
以下为某型号反射镜技术指标
| 型号 | 发射波长范围(nm) | 反射率 | 型号 | 反射波长范围(nm) | 反射率 |
| 850nm反射镜 | 800-900 | Rave≥99% | 940nm反射镜 | 900-980 | Rave≥99% |
| 905nm反射镜 | 890-920 | Rave≥99% | 1550nm | 1500-1600 | Rave≥99% |
| 注:入射角45度 | 注:入射角45度 |
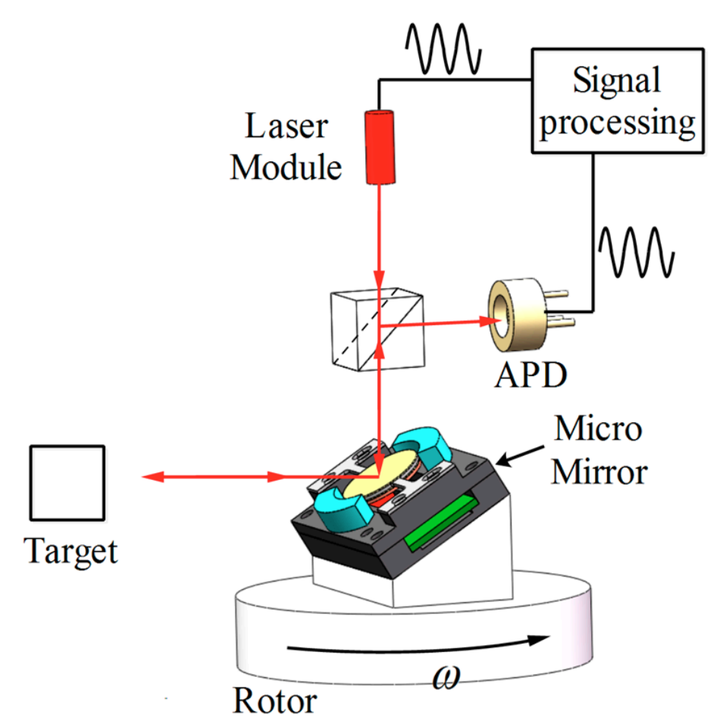
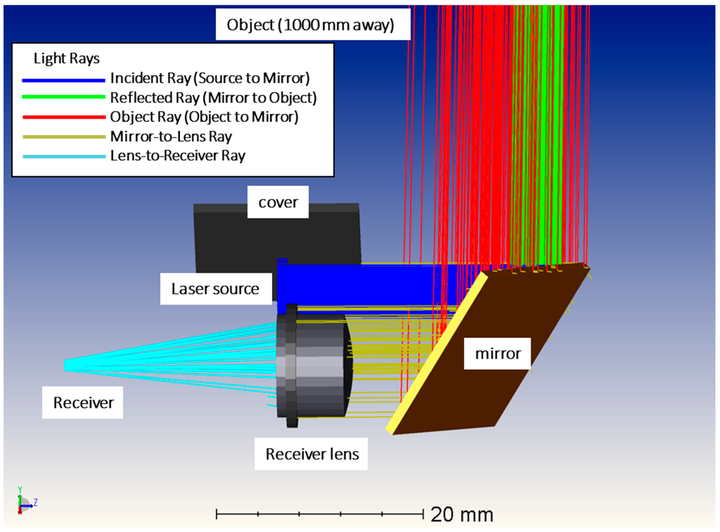
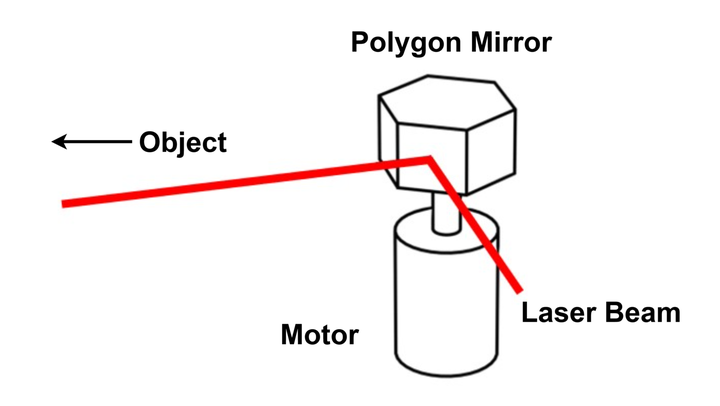
“平面镜型”激光雷达是一种激光雷达,它具有通过将激光束照射到单个平面镜上并旋转平面镜来向多个方向照射激光束的机制。它有时被称为“倾斜镜”类型。图片如下所示。
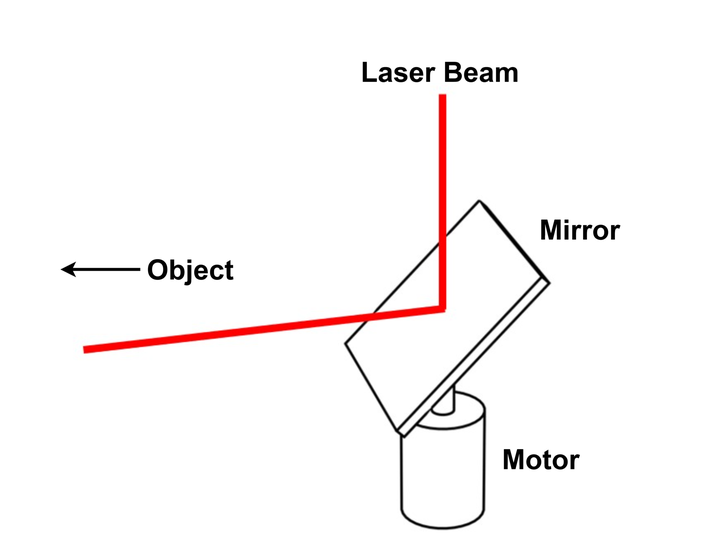
镜子与水平方向成一定角度固定在立柱上,立柱与电机的轴相连。镜子随着电机的旋转而旋转。激光束从镜子顶部照射,反射光照射到物体上。在本图所示的配置中,垂直角度是固定的,只有水平角度发生变化。结果是类似于上述二维激光雷达数据的距离信息。如果镜子旋转 360°,则水平角度范围为 0° 至 360°。如果将镜子放置在自主机器人的头顶上方,它将能够检测 360° 圆周内的障碍物。
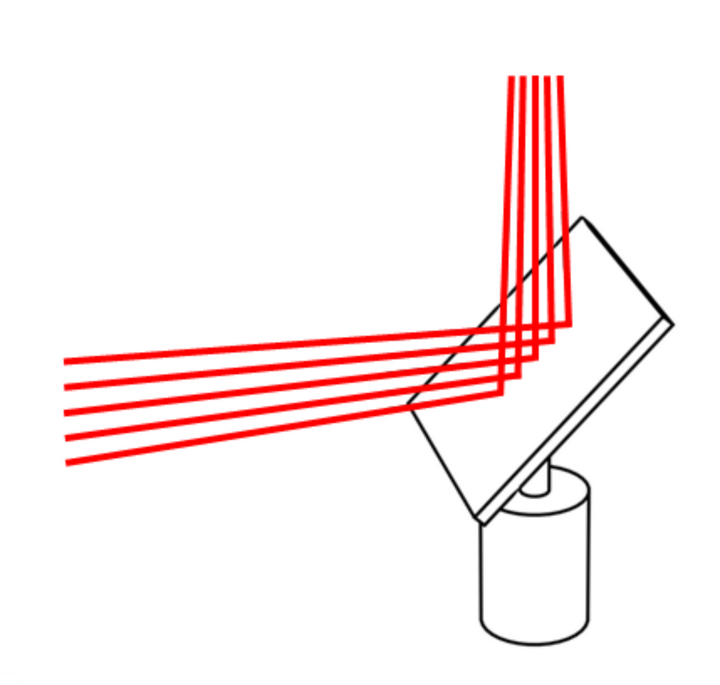
要通过改变垂直角度来制作 3D LiDAR,请将激光器的数量增加所需的角度数。如下图所示,用激光束在垂直方向上以略微不同的角度照射镜子并反射。通过在这种状态下旋转电机,可以获得上述3D LiDAR数据等距离信息。
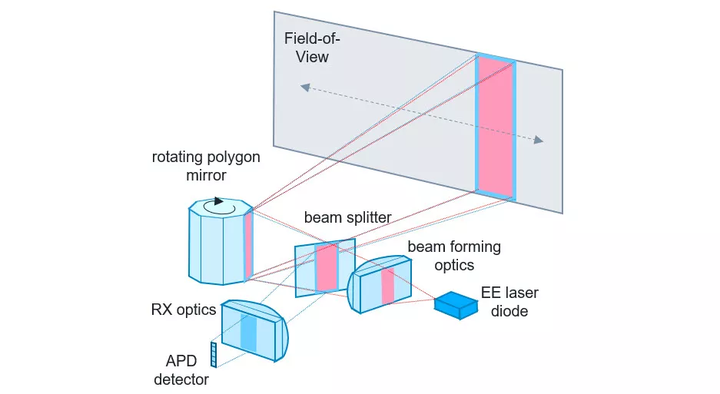
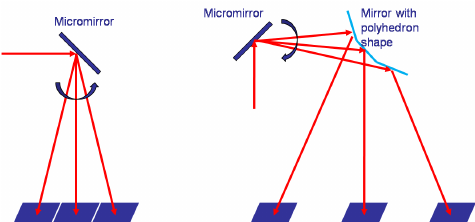
6.2 转镜反射镜(多边形镜像类型)
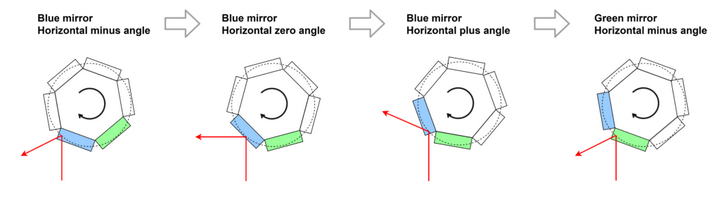
多边形类型的缺点是水平方向的测量范围有限,如上图所示。
6.3 MEMS 振镜
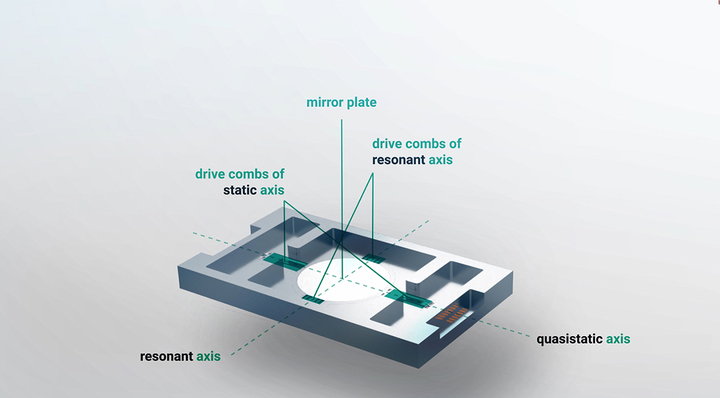
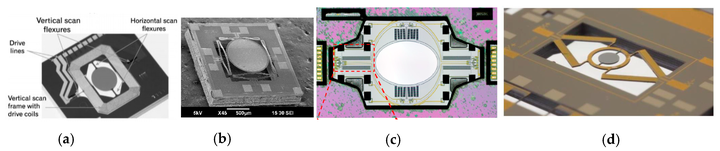
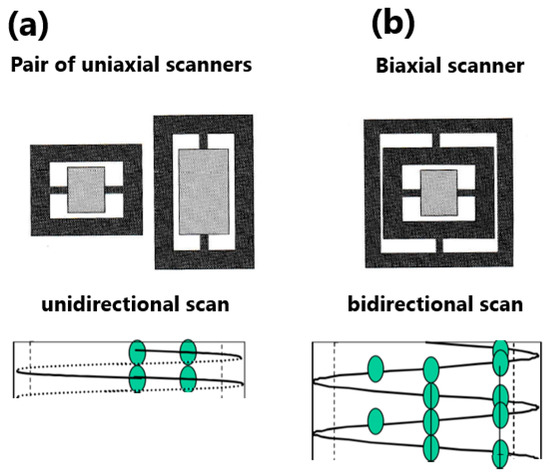
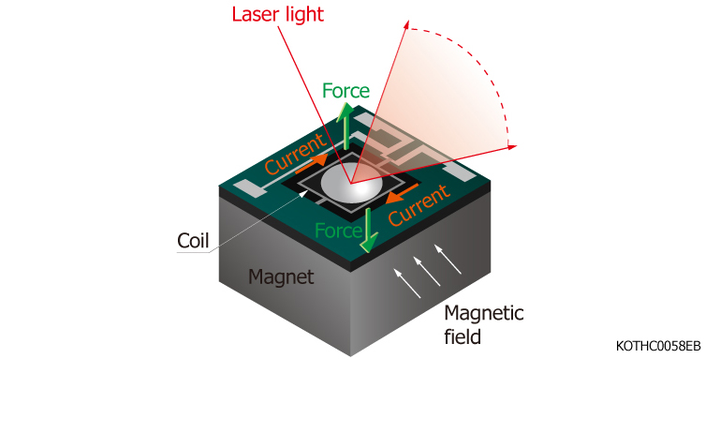
MEMS micro-mirror有电磁式Electro-Magnetic,静电场式 Electrostatic,电热式Electrothermal 几种实现方式。
电磁式Electro-Magnetic:在 MEMS 振镜中,金属线圈形成在单晶硅上,振镜通过 MEMS 处理形成在线圈内部,并且磁体布置在振镜下方。在由磁体产生的磁场内,围绕振镜的线圈中流动的电流基于弗莱明定律产生导致振镜倾斜的洛仑兹力。另外,振镜可以通过 MEMS 处理形成的两个弹簧的组合以二维方式驱动。入射到振镜上的激光路径以这种方式变化以扫描和投射。与静电或压电驱动振镜相比,电磁驱动 MEMS 振镜的驱动电压更低,更易于使用。
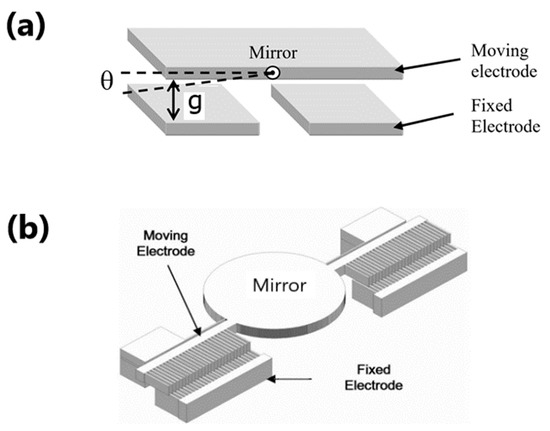
静电场式 Electrostatic
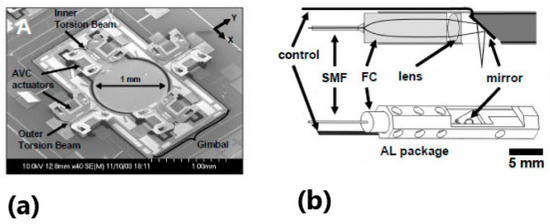
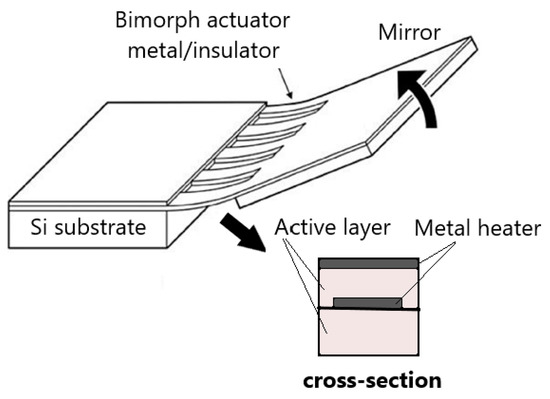
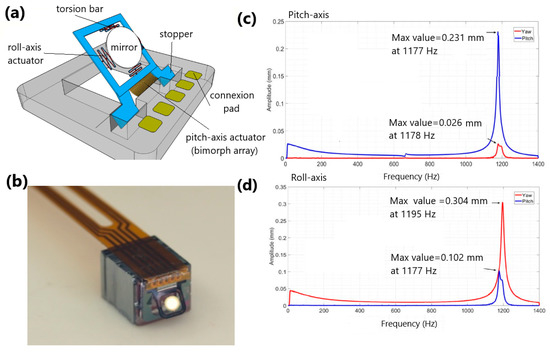
电热式 Electrothermal
三种类别的特性对比如下
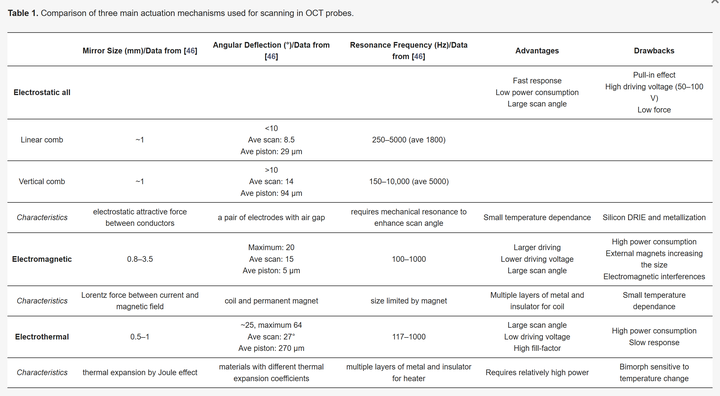
Ref:MEMS Scanning Mirrors for Optical Coherence Tomography
Ref:MEMS Mirrors for LiDAR: A Review
7、透镜 Lens
透镜在各种激光雷达技术中发挥着多方面的作用,每种技术都针对特定的应用和作要求量身定制。以下是它们在不同激光雷达系统中的功能细分:
-
飞行时间 (ToF) 激光雷达:在 ToF 激光雷达系统中,透镜对于将发射的激光脉冲引导和聚焦到目标区域至关重要。这些透镜有助于确保激光束在长距离内保持准直(保持其直径),最大限度地减少光束发散并最大化系统的范围。此外,透镜用于收集反射光并将其聚焦到接收器上,从而能够准确检测发射和接收脉冲之间的时间延迟,用于计算到目标的距离。
-
调频连续波 (FMCW) 激光雷达:FMCW 激光雷达系统依靠激光束的频率调制来确定距离。透镜用于精确塑造和聚焦激光束,确保其在所需范围内保持调频特性。通过精确控制光束轮廓和发散度,透镜有助于优化系统的范围分辨率和灵敏度,以检测目标运动引起的小频移。
-
闪光激光雷达:闪光激光雷达系统通过用单个激光脉冲照亮整个视场,即时捕捉整个场景。闪光激光雷达系统中的透镜用于将发射的光有效地分布在整个视野中,确保均匀的照明并最大限度地减少能量损失。此外,透镜有助于将入射光聚焦到探测器阵列上,从而实现场景的高分辨率成像。复杂的透镜设计还可以结合光束控制功能来调整发射光的方向,从而实现可定制的扫描模式和覆盖范围。
-
差分吸收激光雷达(DIAL):DIAL 系统通过测量特定波长的激光吸收来遥感大气气体。DIAL 激光雷达系统中的透镜用于准直和聚焦以不同波长发射的激光束,确保在目标区域精确对准和重叠。通过控制光束发散和空间重叠,透镜能够以高灵敏度和分辨率精确测量气体浓度和大气参数。
7.1 Flash Lidar中的透镜注意
Flash激光雷达镜头设计的具体挑战和解决方案:
-
均匀照明:在Flash激光雷达系统中,确保整个 FOV 的均匀照明具有挑战性。传统的镜头设计可能会导致光分布不均匀,从而导致强度和图像质量的变化。一种解决方案是采用带有专用光学元件的定制镜头设计,以优化光分布并最大限度地减少渐晕。
-
最大限度地减少失真:桶形畸变或枕形畸变等失真会影响Flash激光雷达成像中 3D 重建的准确性。设计具有低畸变特性的镜头,以及在后处理中采用先进的畸变校正算法,可以帮助减轻这些影响并提高系统的整体精度。
-
减少色差:色差会导致不同波长的光聚焦在不同的点,会降低Flash激光雷达系统的图像质量和色彩准确度。使用具有低色散特性的镜片材料并结合消色差双合镜或复消色差透镜等校正元件可以帮助最大限度地减少色差并保持色彩保真度。
-
优化景深:在Flash激光雷达应用中,实现合适的景深对于在不同距离内捕捉清晰且聚焦良好的图像至关重要。设计具有可调节光圈的镜头或结合自动对焦机制可以帮助优化景深并确保整个场景的图像质量一致。
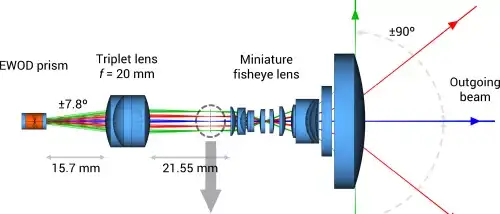
在下图中,我们可以看到Flash激光雷达的发射光学系统。EWOD(电润湿)棱镜用于扫描 15.6 度弧度的激光束。三联透镜在鱼眼上产生远心光束,鱼眼将视场角增加到近 180 度弧度
7.2 Scanning Lidar中的透镜注意
扫描激光雷达镜头设计的最新进展和趋势:
-
提高光学性能:镜片材料、涂层和制造技术的最新进展使镜片具有改进的光学性能,包括更高的分辨率、更好的对比度和更少的失真。这些进步提高了扫描激光雷达系统的准确性和可靠性。
-
紧凑轻巧的设计:开发用于扫描激光雷达系统的紧凑轻质镜头的趋势日益增长,特别是对于无人机、机器人和手持设备中的应用。小型化镜头可在不影响性能的情况下实现便携式多功能扫描激光雷达解决方案。
-
定制镜头设计:随着对专业扫描激光雷达应用的需求不断增加,人们正在转向根据特定要求量身定制的定制镜头设计。定制透镜可能包含非球面、衍射元件或针对特定扫描图案或环境条件进行优化的多元件配置。
-
与其他传感器集成:扫描激光雷达系统通常与相机、雷达和惯性测量单元 (IMU) 等其他传感器集成,以提供补充数据以增强感知和导航能力。集成传感器系统的镜头设计必须考虑传感器对准、同步和数据融合等因素。
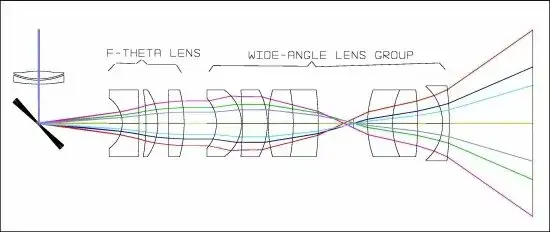
扫描激光雷达系统的示例如下图所示。在其中,我们有一个聚焦透镜,它将光聚焦在 MEMS 上,MEMS 将光反射到 f-theta 透镜中。f-theta 透镜在平面上创建图像,它由三个光学元件组成(有效焦距为 100 毫米)。下一阶段是广角组,将 FOV 增加到 120 度弧度。
激光雷达镜头设计见解:常见问题
设计激光雷达系统镜头的关键考虑因素是什么?
关键考虑因素包括镜头材料、光学分辨率、焦距以及与激光雷达光波长的兼容性。设计必须确保最小的光学像差和高精度,以实现精确的距离测量。
Flash激光雷达和扫描激光雷达在镜头要求方面有何不同?
Flash激光雷达通常需要能够处理宽视野的镜头,而扫描激光雷达镜头需要适应快速移动和精确对焦以进行扫描。
激光雷达镜头设计可以标准化还是需要针对每个应用进行定制?
虽然有标准的镜头设计,但特定应用通常需要定制设计,以满足范围、分辨率和视场等独特性能标准。
8、视窗 cover glass、radome,optical window
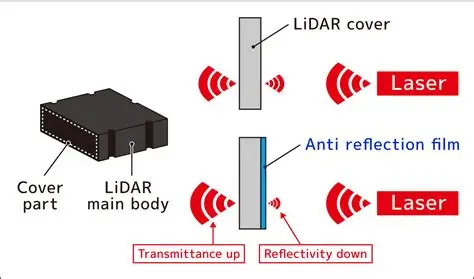
当反向散射激光返回传感器时,一定量的激光在到达探测器之前会被盖板玻璃(也称为天线罩)反射。因此,通过使用抗反射 (AR) 涂层来最大限度地减少反射光量以优化车辆的安全性和性能至关重要。
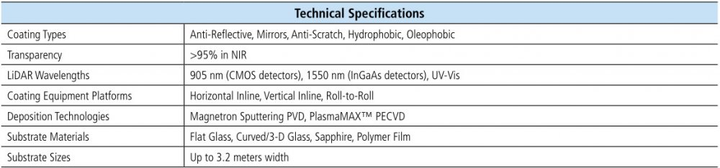
全面的薄膜镀膜设备和解决方案,包括抗反射 (AR) 涂层和保护涂层,可优化 LiDAR 系统在恶劣环境中的性能。AR 涂层可减少表面反射并增加到达传感器的光量,而保护涂层可以帮助保护传感器免受雨水、碎片和其他可能影响其性能的环境因素的影响。
激光雷达系统通常用于暴露在雨、风、沙子和灰尘中的恶劣户外环境中。因此,盖板玻璃上的涂层必须在较长时间内提供卓越的耐候性和耐用性。

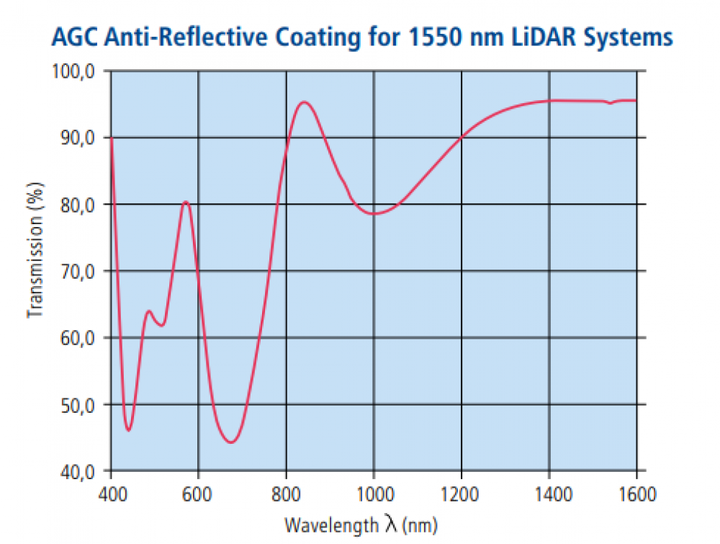
大多数自动驾驶激光雷达系统使用近红外 (NIR) 波长的激光器,波长通常为 905 nm、1064 nm、1310 nm 或 1550 nm。AGC Plasma Technology Solutions 开发了干涉涂层堆栈,以最大限度地减少这些波长的反射。
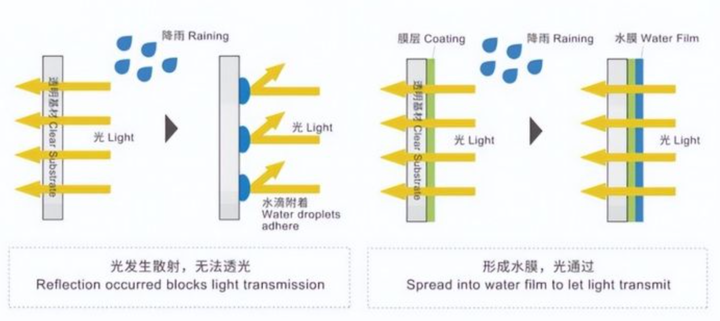
视窗/光罩 作为激光雷达最外部的光学元件,需具备一定的主动抗干扰能力,其次恶劣的环境需要这些滤波片能够经受很宽泛的温度范围(零下 40℃ 到零上 80 ℃),特别是车窗所面临的环境,还可能暴露在雨水、冰层、道路除冰盐以及其他所有路上驾驶时所能遇到的元素环境中。这就需要视窗同时镀有疏水膜、 增透膜、除雾膜等多种膜系以保障恶劣天气的性能稳定性。 此外,在车辆使用寿命内,这些滤波片需要在没有维护和校准的情况下,在上述环境状况中正常运行。
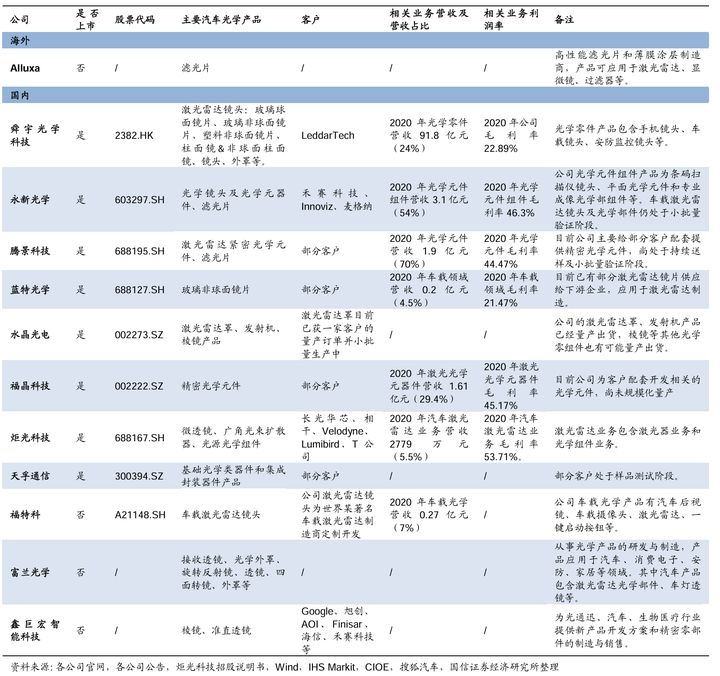
9、Lidar光学部件供应商

为武汉地区的开发者提供学习、交流和合作的平台。社区聚集了众多技术爱好者和专业人士,涵盖了多个领域,包括人工智能、大数据、云计算、区块链等。社区定期举办技术分享、培训和活动,为开发者提供更多的学习和交流机会。
更多推荐

 41
41 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)