
利用MATLAB创建栅格地图(代码可复制)
分享两段MATLAB创建栅格地图的代码~
先做一个声明:文章是由我的个人公众号中的推送直接复制粘贴而来,因此对智能优化算法感兴趣的朋友,可关注我的个人公众号:启发式算法讨论。我会不定期在公众号里分享不同的智能优化算法,经典的,或者是近几年提出的新型智能优化算法,并附MATLAB代码。
“有不少的同学利用智能优化算法搞路径规划,往往需要创建栅格地图,这里分享两段MATLAB创建栅格地图的代码~”
路径规划需要环境建模,环境建模的目的是模拟现实场景,将物理空间复刻到抽象空间,建立一个可以并且便于计算机处理的环境模型。环境建模其实质就是将算法需要处理的约束条件与物理环境中的障碍物等进行一一映射,并且使路径搜索的情况可以直观的展示在虚拟场景中。机器人路径规划的重要环节之一就是建立一个环境模型了,方便直观地展现出路径规划的场景和规划结果。
建立环境模型的基本要求就是计算机便于存储、处理和使用。在路径规划方面最常用的图形学环境建模方法有几何法和栅格法。这里介绍一下栅格法。
栅格法根据比例和分割要求,将模拟环境进行分割,划分成若干相同的栅格,然后针对每个栅格设置环境参数,根据实际或假设环境,设置其中各个栅格障碍物的情况。栅格法处理的环境模型所得栅格数据结构实际就是一张二维表,因此栅格地图在计算机中是比较容易创建和维护的。由于栅格地图是按照一定的规则划分的,所以很容易将其转移到坐标系下,这样障碍物的位置和可行区域就能更加直观的展示出来,通过行列来显著标识各位置信息。
栅格法建模的优点:在栅格地图中,每个位置都可由坐标点来确定,该位置状态也可由具体数据来表示。栅格地图很容易于在计算机中进行存储、更新与分析,且该方法已在许多机器人系统中得到了成功应用。
01
随机生成
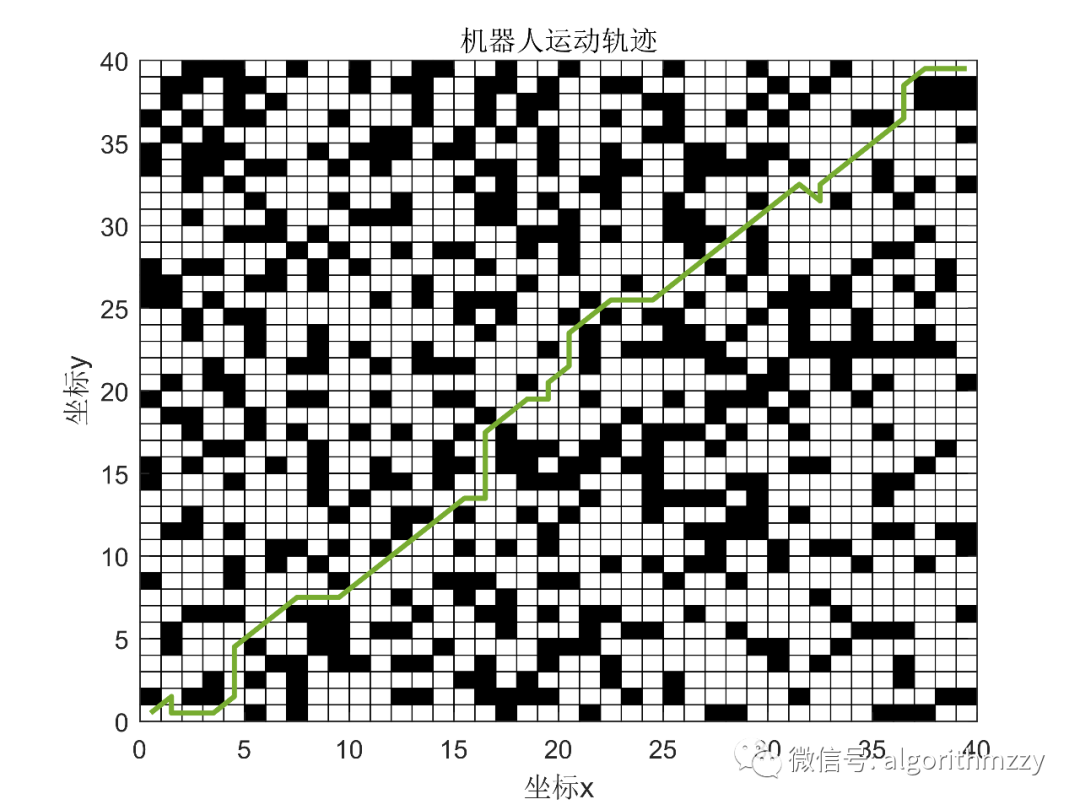
原理其实很简单,随机生成一个01矩阵,1就表示障碍物,指定起点和终点后,画出来就行了。障碍物以概率来生成,这个概率可以自己定义。比如,以0.3的概率随机生成障碍物的40×40的实例,那么在40×40=1600个格子中,有0.3×1600=480个格子是障碍物,画成黑色。
MATLAB代码如下(可直接复制粘贴):
%% 栅格地图创建 %%
%% By 后会无期 %%
%% 2023.10.24 %%
%% 关注微信公众号:启发式算法讨论 %%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear
clc
%% 以"Probability"的概率生成m×n的栅格图障碍物环境
Probability=0.2; % 设置障碍区概率(可自行更改)
m=30;n=30; % 设置地图的大小(可自行更改)
R=rand(m,n); % 初始化一个m×n的[0,1]之间随机矩阵,用来生成矩阵G
G=zeros(m,n); % 初始化一个m×n的零矩阵,后续用来存储地图
for i=1:m
for j=1:n
if R(i,j)<=0.2
G(i,j)=1; % 1表示障碍物
else
G(i,j)=0; % 0表示无障碍
end
end
end
% 规定起点和终点(可自行更改)
G(1,1)=0;
G(m,n)=0;
%% 画栅格地图
figure;
axis([0,m,0,n]);
for i=1:m
for j=1:n
% 计算小方框的四个顶点的横、纵坐标
x1=j-1;y1=n-i;
x2=j;y2=n-i;
x3=j;y3=n-i+1;
x4=j-1;y4=n-i+1;
% 绘制栅格图
if G(i,j)==1
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[0,0,0]);
hold on
else
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[1,1,1]);
hold on
end
end
end
% 画起点图标(可自行更改)
fill([0,1,1,0],[n-1,n-1,n,n],[1,0,0]);
% 画终点图标(可自行更改)
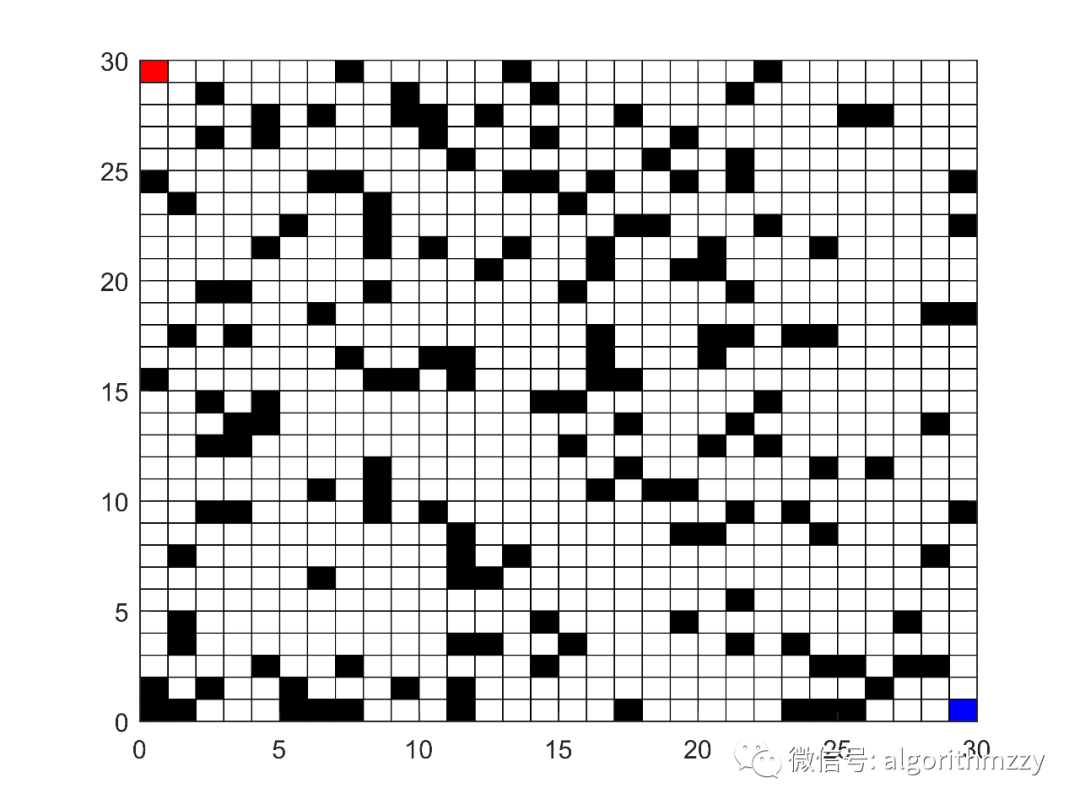
fill([m-1,m,m,m-1],[0,0,1,1],[0,0,1]);比如以0.2概率随机生成障碍物的30×30栅格地图,运行代码结果如下:
但是,也有一个弊端。因为是随机生成障碍物,所以障碍物有可能把起点或者终点包围,就没办法求解了。比如,我们把障碍物的概率提升到0.4,还是以30×30的地图为例,就有可能出现下面这种情况:
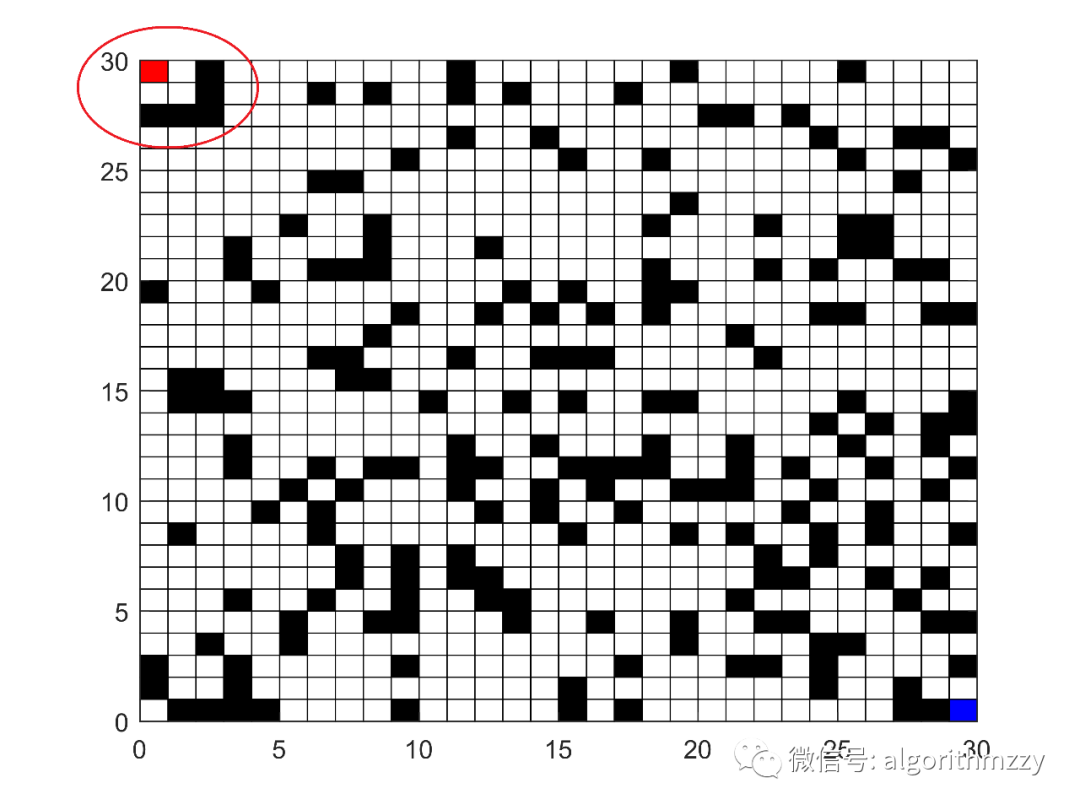
如果是这种情况就只能再重新随机生成栅格地图了。
02
手动创建
手动创建就是自己手动设置障碍物的位置,这样就可以避免上面那种方法的弊端,不会让障碍物包围起点或者终点。
MATLAB代码如下(可直接复制粘贴):
%% 栅格地图创建 %%
%% By 后会无期 %%
%% 2023.10.24 %%
%% 关注微信公众号:启发式算法讨论 %%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear
clc
%% 生成m×n的栅格图障碍物环境
m=30; n=30;
% 规定每个坐标中的对象
matrix=(ones(m,n)); % 地图矩阵
imshow(matrix,'InitialMagnification','fit')
[Row,Column] = size(matrix); % 获取图像的大小
% 产生网格
x = 0.5:1:Column+1;
y = 0.5:1:Row+1;
M = meshgrid(x,y);
N = meshgrid(y,x);
hold on
plot(x,N,'b'); % 画出水平横线
plot(M,y,'b'); % 画出垂直竖线
pause(1);
% 构建一个对话框
zuo=msgbox('利用鼠标左键定义障碍物位置,定义完成后右键定义最后一个障碍物结束定义');
uiwait(zuo,10);
if ishandle(zuo) == 1
delete(zuo);
end
% 设置横坐标题目, 再次提醒
xlabel('利用鼠标左键定义障碍物位置,定义完成后右键定义最后一个障碍物结束定义','Color','red');
ob = 1;
while ob == 1
[xval,yval,ob] = ginput(1);
xval=floor(xval + 0.5);
yval=floor(yval + 0.5);
matrix(yval,xval)=0; % 设置障碍物
imshow(matrix,'InitialMagnification','fit')
plot(x,N,'b'); % 画出水平横线
plot(M,y,'b'); % 画出垂直竖线
end
hold off
figure
imshow(matrix,'InitialMagnification','fit') % 画出最终栅格图
save('MAP.mat','MAP'); % 存储栅格地图的矩阵还是以30×30的地图为例,运行结果如下:
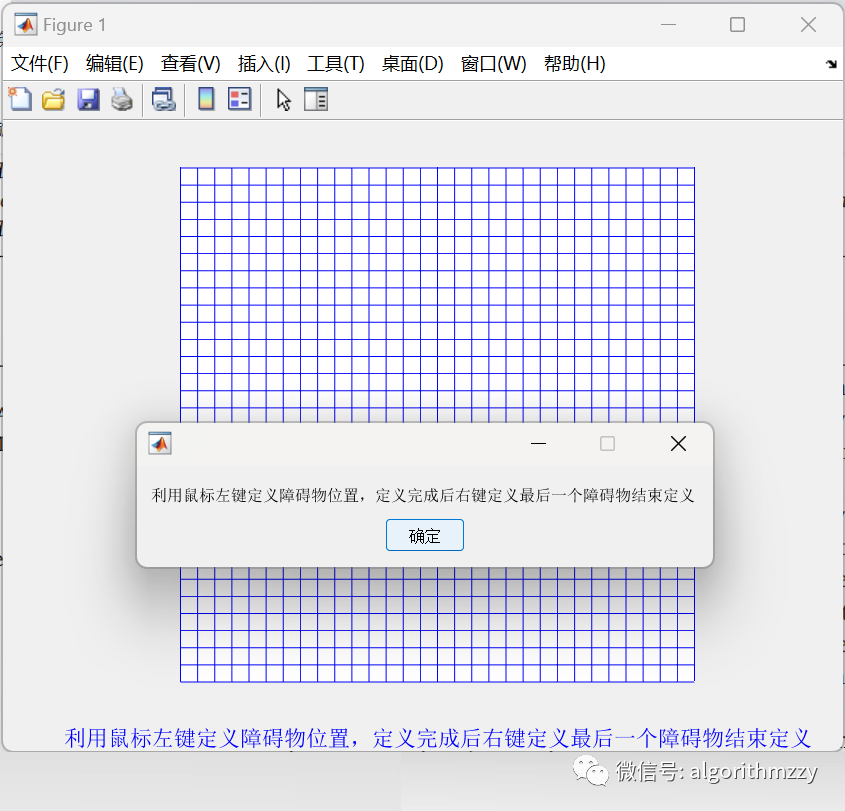
然后就自己手动创建障碍物。用鼠标来点点点。我这里懒得点。
手动创建的弊端就是繁琐。比如以0.3的概率随机生成障碍物的30×30的实例,那么在30×30=900个格子中,有0.3×900=270个格子是障碍物,你需要点270次才能完成创建。而在这个过程中,你需要自己计数。
最后,应大家要求,建立了一个算法交流群:912369858
欢迎大家进群交流,谢谢!

可通过下方链接下载代码清单,在里面寻找需要的算法代码,然后去对应的链接获取。清单会同步更新,一旦有新的代码,就可以在清单里找到。清单里面有部分代码是开源获取的。可随时免费下载。
链接:https://pan.baidu.com/s/1SFDMplrL7tiqGZlrpOSGYg
提取码:8023

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)