
对射式红外传感器模块、测速传感器模块、计数器模块、电机测试模块、槽型光耦模块
该产品采用FTR9606高灵敏度槽型光耦器件,槽宽5mm。它由一个红外发光二极管和NPN光电三极管组成,M3固定安装孔,有输出状态指示灯,输出高电平灯灭,输出低电平灯亮。有遮挡,输出高电平。无遮挡,输出低电平。使用3.3-5VDC 宽电压LM393比较器输出,信号干净,波形好,驱动能力强,超过15mA。输出形式:数字开关量输出(0和1)。广泛用于电机转速检测,脉冲计数,位置限位等。1、使用进口IT
一、产品简介

该产品采用FTR9606高灵敏度槽型光耦器件,槽宽5mm。它由一个红外发光二极管和NPN光电三极管组成,M3固定安装孔,有输出状态指示灯,输出高电平灯灭,输出低电平灯亮。有遮挡,输出高电平。无遮挡,输出低电平。使用3.3-5VDC 宽电压LM393比较器输出,信号干净,波形好,驱动能力强,超过15mA。输出形式:数字开关量输出(0和1)。广泛用于电机转速检测,脉冲计数,位置限位等。
即:
- 1、使用进口ITR9606高灵敏度槽型光耦传感器,槽宽度5mm。
- 2、有输出状态指示灯,输出高电平灯灭,输出低电平灯亮。
- 3、有遮挡,输出高电平;无遮挡,输出低电平。
- 4、比较器输出,信号干净,波形好,驱动能力强,超过15mA。
- 5、工作电压3.3V-5V
- 6、输出形式:数字开关量输出(0和1)
- 7、设有M3固定螺栓孔,方便安装
- 8、小板PCB尺寸:3.2cm x 1.4cm
- 9、使用宽电压LM393比较器
- 10、广泛用于电机转速检测,脉冲计数,位置限位等。
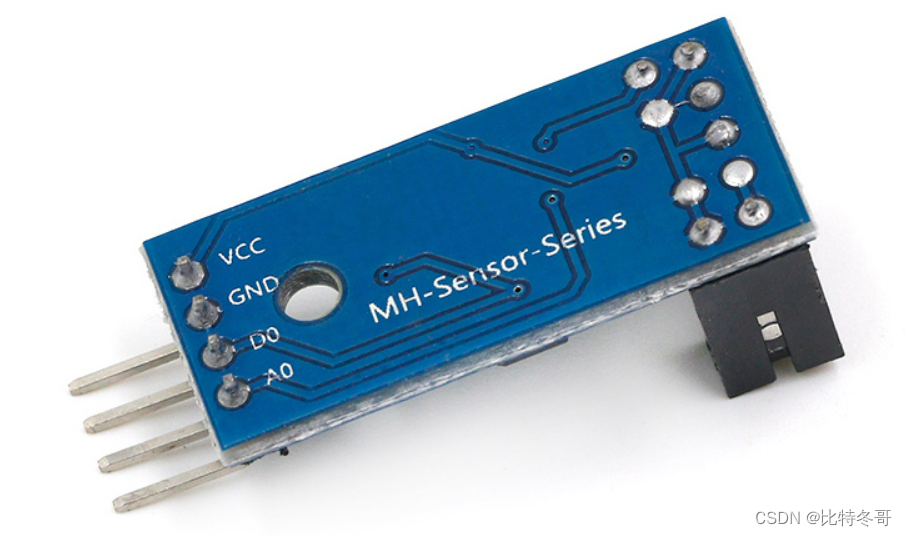
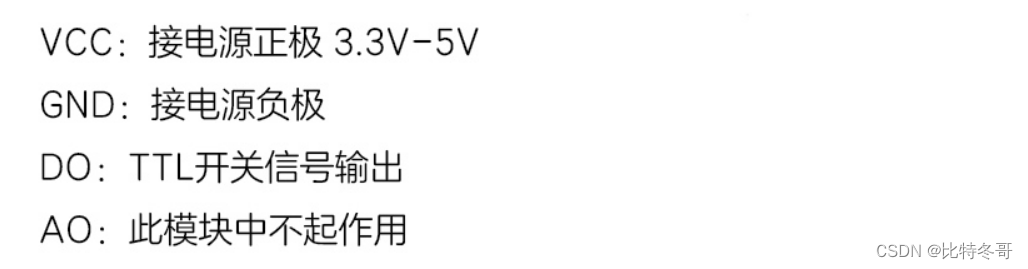
引脚:
操作说明:
- 1、接好VCC和GND,模块电源指示灯会亮
- 2、模块槽中无遮挡时,接收管导通,模块DO输出低电平,开关指示灯亮;遮挡时,DO输出高电平,开关指示灯灭。
- 3、模块DO可与继电器相连,组成限位开关等功能,也可以与有源蜂鸣器模块相连,组成报警器。
- 4、DO输出接口可以与单片机10口直接相连,一般接外部中断,检测传感器是否有遮档,如用电机码盘则可检测电机的转速。
二、原理分析
-
测距离: 测速传感器输出为脉冲信号,一个脉冲中断一次;红外射线导通的时候是低电平,所以我们设置中断为低电平触法模式。一般码盘上有整数格子,无论是多少格其实原理一样,例如10格码盘,也就是有10个空格子,电机转一圈后便是射线导通10次,外部低电平触法10次;安装上面的思路,我们的测速传感器就可以发挥出效果了,我们知道一圈就有10个中断,于是我们计算中断次数,得到的总次数除于10也就是电机转动次数了,然后按照轮子的周长,计算轮子一圈是多长,就可以推算出小车已经跑多远了。
-
测速度: 按照测距离的思路,我们用一个MCU定时器计算,1秒内接收多少个外部中断,例如一秒内接收了20个外部中断,我们就可以判断小车速度为1秒小车轮子转两圈,然后再计算出小车轮子的周长,就可得知小车1秒行驶的速度。
tips:
- 1、正确接线!切勿将正负接反,使板子电子器件烧毁。
- 2、玩家应该设置MCU的1/0口为输入模式/接收模式,否则无法使用。其他 MCU,或者更为高级的控制板如ARM这些,若需设置Ⅰ/0口为输入输出模式,都必须设置为输入模式/接收模式,否则无法使用。
- 51系列单片机可直接使用,无需设置输入输出模式。
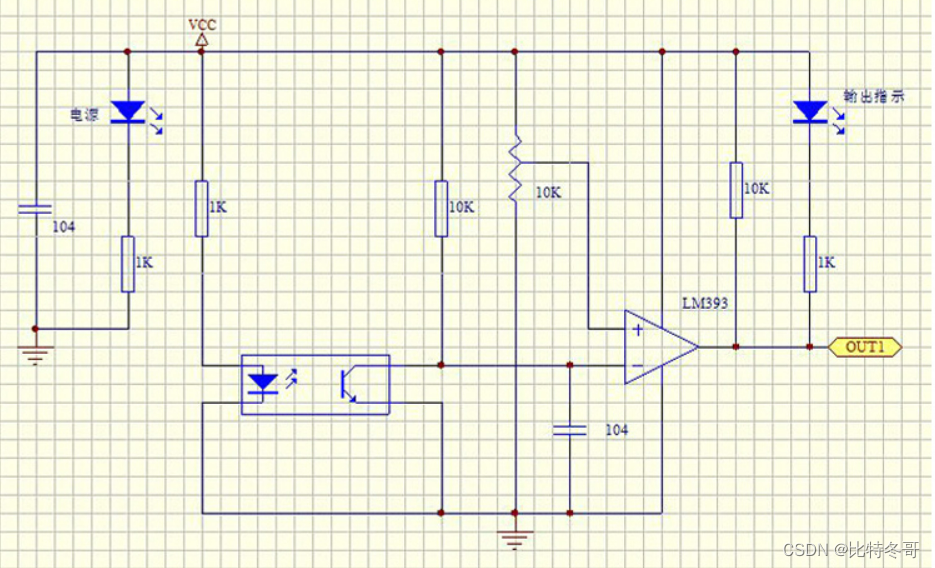
电路原理图:
接线图:
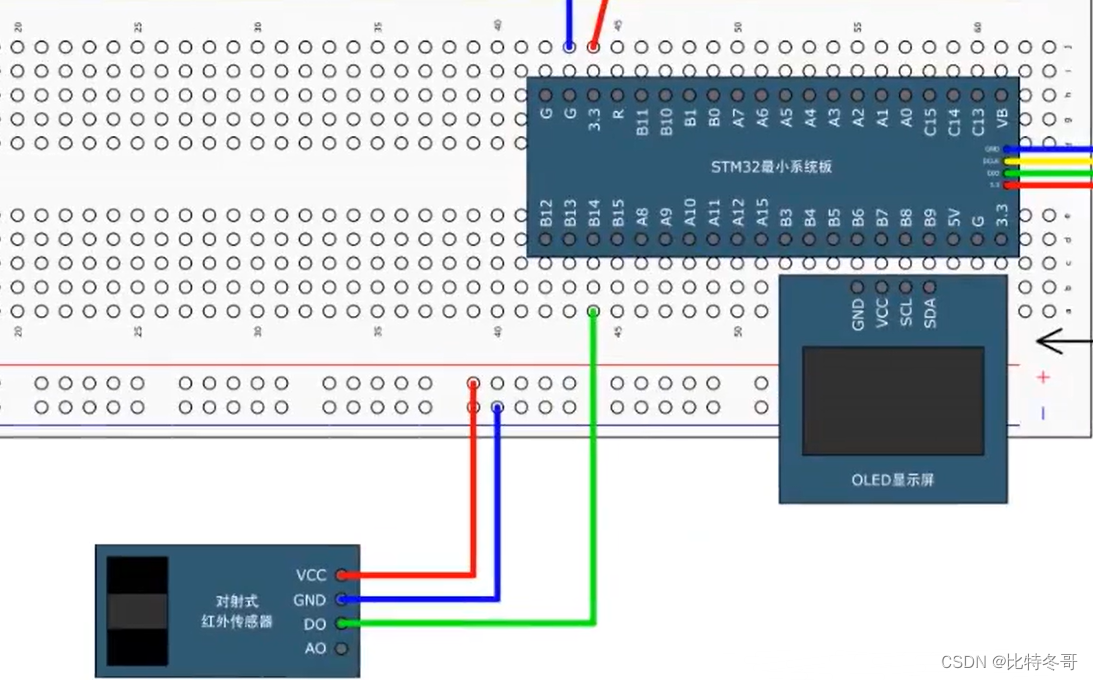
由上知:其中VCC和GND不用我多说,AO用不上,所以这里只需将DO接入某个引脚,根据脉冲数进行测量。
三、程序设计
测速模块的OUT口链接MCU的外部中断口,每当有红外射线导通就是一个外部缓冲。
所以我这里程序设计为 每发生一个脉冲就进入中断函数,计数器+1,并通过oled显示在屏幕上。
1. 引脚初始化
先对DO接入的引脚进行初始化,这里我以PB14为例展开设计
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
2. 外部中断配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14); //外部中断源
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line14; //中断标志位
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
3. 中断函数
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
void EXTI15_10_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line14) == SET)
{
/*如果出现数据乱跳的现象,可解除以下注释,再次判断引脚电平,以避免抖动*/
// if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0)
// {
CountSensor_Count ++;
// }
EXTI_ClearITPendingBit(EXTI_Line14);
}
}
4. main函数
int main(void)
{
OLED_Init();
CountSensor_Init();
OLED_ShowString(1, 1, "Count:");
while (1)
{
OLED_ShowNum(1, 7, CountSensor_Get(), 5);
}
}
四、程序源码
有需要者 可留言评论区或私信

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 41
41 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)