
调试速腾聚创激光雷达RS-LIDAR-M1(在Windows系统下)
RS-LIDAR-M1是速腾聚创研发的一款车规级别三维固态激光雷达,本文主要记录该型号激光雷达在Windows以及Linux系统下的基础调试及相关算法调试使用步骤。
1.概述
RS-LIDAR-M1是速腾聚创研发的一款车规级别三维固态激光雷达,本文主要记录该型号激光雷达在Windows以及Linux系统下的基础调试及相关算法调试使用步骤。
本文的学习目标如下:
- 掌握RS-LIDAR-M1在两种不同电脑系统上的调试使用步骤。
- 通过该激光雷达掌握一些关于ROS的一些基础内容使用。
2.RS-LIDAR-M1在Windows系统上的调试及使用
2.1下载安装测试驱动
本次测试激光雷达用的驱动程序为RSview以及Wireshark,下载链接如下:
RSview:资源中心 - RoboSense(速腾聚创) - 自动驾驶激光雷达
Wireshark:Wireshark · Go Deep.
其中RSview下载后解压即可,启动文件RSview.exe在解压后的bin文件夹内,Wireshark按照默认状态安装。
2.2接线
本次是通过interface box(电源转接盒)的方式将激光雷达与电脑端进行连接,需要用到的设备包括激光雷达、电源转接盒、电源、千兆网线。这里要注意的是,由于传输的点云数据量庞大,百兆规格的网卡和网线不足以传输这样大的数据量,所以必须要用千兆网线,并且电脑网卡是千兆网卡,否则无法正常连接。查看网卡链接速度方式:设置--网络和Internet--以太网--链接速度(接收/传输),显示为1000/1000 (Mbps)则表示电脑网卡为千兆级别,能够正常连接。将所需设备接线连接好,网线连接电脑及电源转接盒,本次激光雷达单独插电源供电,不通过电脑。如下图:
 图1 接线
图1 接线
2.3设置IP
打开电脑设置--网络和Internet--以太网,对IPv4进行IP设置,将IPv4设置为192.168.1.102,掩码为0.0.0.0。RSLiDAR-M1 网络参数可配置,出厂默认采用固定 IP 和固定目的端口号模式。按照如下表格:
| IP地址 | MSOP包端口号 | DIFOP包端口号 | |
| RS-LIDAR-M1 | 192.168.1.200 | / | / |
| 电脑 | 192.168.1.102 | 6699 | 7799 |
表1 参数配置
2.4可视化调试
设置好IP地址以后,找到RSview文件下,用bin文件下的RSview.exe启动。
- File--Open--Sensor Stream,在弹出的 Sensor Configuration 窗口中,Sensor Calibration 默认包含一个命名为MEMSCorrectionFile_3V 的雷达参数,选择此参数后点击 OK。RS-LiDAR-M1原始点云输出的已经是校准过的点云,所以此参数文件里的值为空。
- Tools--Sensor Network Configuration,选择use udp, 并且输入正确的 MSOP 端口号和 DIFOP 端口号,其他的不用填写。

图 2 RSview参数设置
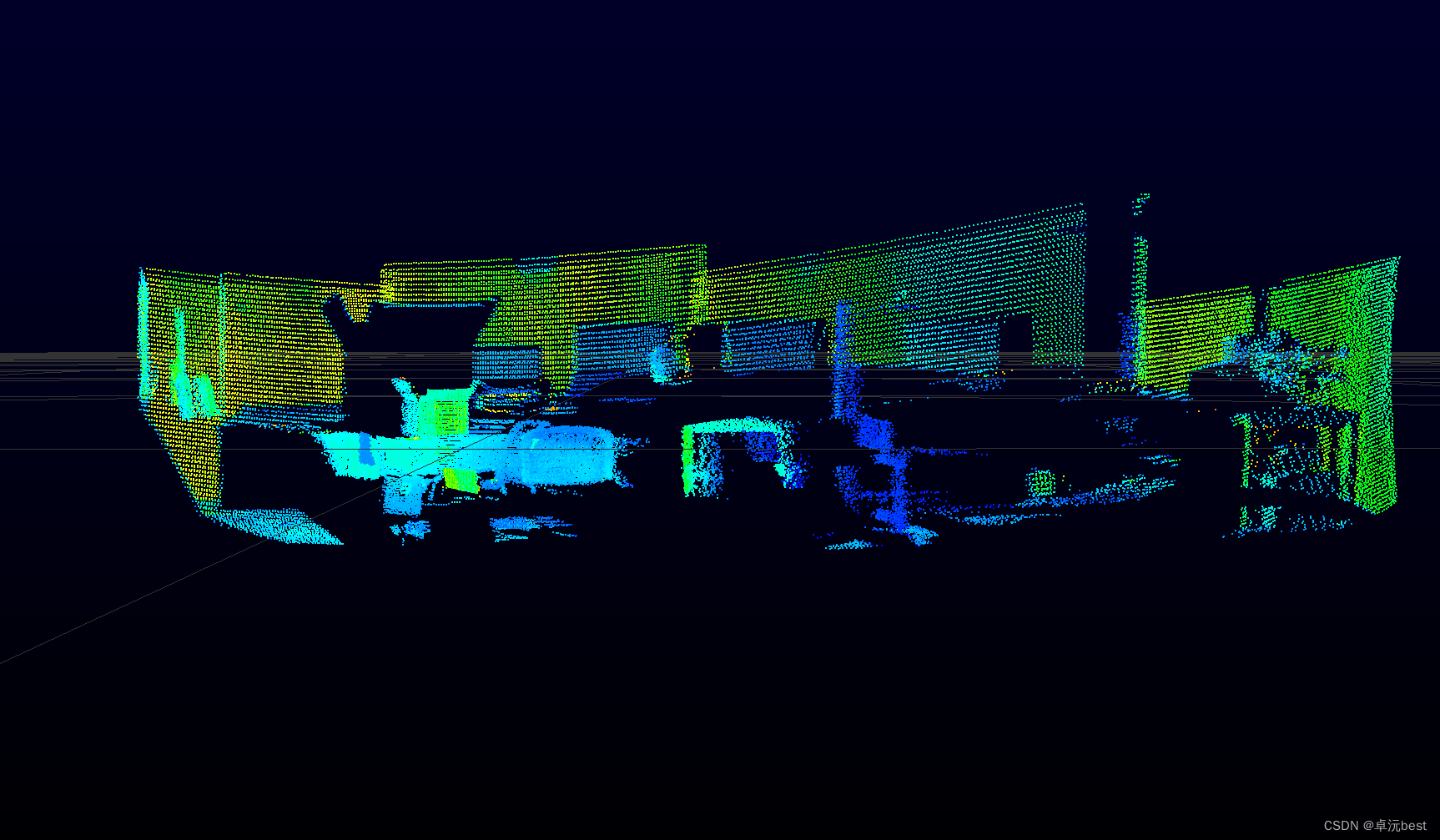
现在RSView 开始显示实时采集到数据。可以通过点击 Play 按钮暂停,再点击一次可以继续显示。如下图:

图 3 实时点云画面
未完待续。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)