[记录]机器人学期末开卷考试
1.1)证明任何旋转矩阵的行列式的值恒为1方法1:旋转矩阵 R 把n维空间中的一组标准正交基转化成另一组标准正交基,这两组标准正交基分别用矩阵 E E’来表示即:RE=E′RE = E'RE=E′因为det(E)=1det(E) = 1det(E)=1所以det(RE)=1det(RE)=1det(RE)=1det(R)det(E)=1det(R)det(E)=1det(R)det(E)=1所以d
题目链接:
https://download.csdn.net/download/ASUNAchan/86511275
1. 1)证明任何旋转矩阵的行列式的值恒为1
方法1:旋转矩阵 R 把n维空间中的一组标准正交基转化成另一组标准正交基,这两组标准正交基分别用矩阵 E E’来表示
即:
R
E
=
E
′
RE = E'
RE=E′
因为
d
e
t
(
E
)
=
1
det(E) = 1
det(E)=1
所以
d
e
t
(
R
E
)
=
1
det(RE)=1
det(RE)=1
d e t ( R ) d e t ( E ) = 1 det(R)det(E)=1 det(R)det(E)=1
所以
d
e
t
(
R
)
=
1
det(R)=1
det(R)=1
方法2:
由旋转矩阵定义,可知,绕x轴旋转的旋转矩阵为:
同理可以得到Ry,Rz
对于Rx,Ry,Rz显然它的行列式为1
对于绕任意轴旋转的转转矩阵
M
=
R
z
∗
R
y
∗
R
x
M = Rz * Ry * Rx
M=Rz∗Ry∗Rx
又因为
d
e
t
(
A
B
)
=
d
e
t
(
A
)
d
e
t
(
B
)
det(AB)=det(A)det(B)
det(AB)=det(A)det(B)
所以
d
e
t
(
M
)
=
d
e
t
(
R
z
∗
R
y
∗
R
x
)
=
d
e
t
(
R
z
)
d
e
t
(
R
y
)
d
e
t
(
R
x
)
=
1
det(M) = det(Rz * Ry * Rx)=det(Rz)det(Ry)det(Rx) = 1
det(M)=det(Rz∗Ry∗Rx)=det(Rz)det(Ry)det(Rx)=1
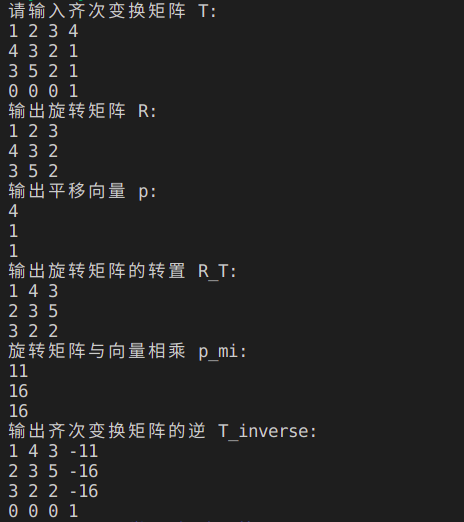
2. 3)编程求解齐次变换矩阵的逆矩阵
C++代码
#include <iostream>
#include <string.h>
using namespace std;
int main(int argc, char *argv[])
{
//输入齐次变换矩阵---------------------------------
double T[4][4];
int icount, jcount;
cout << "请输入齐次变换矩阵 T: " << endl;
for (icount = 0; icount < 4; icount++)
{
for (jcount = 0; jcount < 4; jcount++)
{
cin >> T[icount][jcount];
}
}
//得到旋转矩阵-------------------------------------
double R[3][3];
cout << "输出旋转矩阵 R: " << endl;
for (icount = 0; icount < 3; icount++)
{
for (jcount = 0; jcount < 3; jcount++)
{
R[icount][jcount] = T[icount][jcount];
cout << R[icount][jcount] << " ";
}
cout << endl;
}
//得到平移向量-------------------------------------
double p[3];
cout << "输出平移向量 p: " << endl;
for (icount = 0; icount < 3; icount++)
{
p[icount] = T[icount][3];
cout << p[icount] << " " << endl;
}
//求旋转矩阵的转置----------------------------------
//求R的转置 行变列 列变行
double R_T[icount][jcount];
cout << "输出旋转矩阵的转置 R_T: " << endl;
for (icount = 0; icount < 3; icount++)
{
for (jcount = 0; jcount < 3; jcount++)
{
R_T[icount][jcount] = R[jcount][icount];
cout << R_T[icount][jcount] << " ";
}
cout << endl;
}
//旋转矩阵与平移向量相乘-----------------------------
double p_mj[jcount];
double p_mi[icount];
cout << "旋转矩阵与向量相乘 p_mi: " << endl;
for (icount = 0; icount < 3; icount++)
{
int t = 0;
for (jcount = 0; jcount < 3; jcount++)
{
p_mj[jcount] = R_T[icount][jcount] * p[jcount];
t = t + p_mj[jcount];
}
p_mi[icount] = t;
cout << p_mi[icount] << " " << endl;
}
//变换矩阵T的逆 T_inverse---------------------------
double T_inverse[4][4];
for (icount = 0; icount < 4; icount++)
{
if (icount < 3)
{
for (jcount = 0; jcount < 4; jcount++)
{
if (jcount < 3)
{
T_inverse[icount][jcount] = R_T[icount][jcount];
}
else
{
T_inverse[icount][jcount] = -p_mi[icount];
}
}
}
else
{
for (jcount = 0; jcount < 4; jcount++)
{
if (jcount < 3)
{
T_inverse[icount][jcount] = 0;
}
else
{
T_inverse[icount][jcount] = 1;
}
}
}
}
cout << "输出齐次变换矩阵的逆 T_inverse: " << endl;
for (icount = 0; icount < 4; icount++)
{
for (jcount = 0; jcount < 4; jcount++)
{
cout << T_inverse[icount][jcount] << " ";
}
cout << endl;
}
return 0;
}
测试结果:
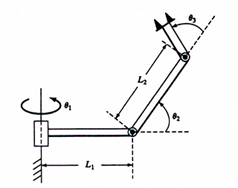
3.1)如图1所示三自由度机械臂,建立运动学正反解模型,并进行仿真验证。
使用matlab所内置的机器人工具箱进行正逆运动学仿真实验。
步骤:
(1)根据已知结构写出此机械臂的D-H参数
| i | alpha(i-1) | a(i-1) | d(i) | theta(i) |
|---|---|---|---|---|
| 1 | pi/2 | l1 | 0 | theta1 |
| 2 | 0 | l2 | 0 | theta2 |
| 3 | 0 | l3 | 0 | theta3 |
(2)将机械臂的各个参数以及D-H参数写入程序
设l1 = 80,l2 = 60,l3 = 30
(3)调用正逆运动学函数进行仿真并绘制图像
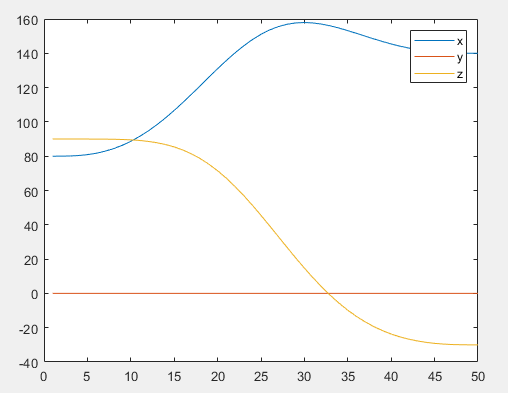
逆运动学实现:
给定末端位置求关节角度
clear ; clc; close all;
% 机器人各连杆DH参数
d1 = 0;
d2 = 0;
d3 = 0;
a1 = 80;
a2 = 60;
a3 = 30;
alpha1 = 0.5 * pi;
alpha2 = 0 ;
alpha3 = 0;
% 定义各个连杆,默认为转动关节
% theta d a alpha
L1=Link([ 0 d1 a1 alpha1]); L(1).qlim=[-pi,pi];
L2=Link([ 0 d2 a2 alpha2]); L(2).qlim=[-pi,pi]; L2.offset=pi/3;
L3=Link([ 0 d3 a3 alpha3]); L(3).qlim=[-pi,pi]; L3.offset=-pi/3;
robot=SerialLink([L1 L2 L3],'name','robot');
T1=transl(80,0,90);%根据给定起始点,得到起始点位姿
T2=transl(140,0,-30 );%根据给定终止点,得到终止点位姿
q1=robot.ikine(T1,'mask', [1 1 1 0 0 0]);%根据起始点位姿,得到起始点关节角
q2=robot.ikine(T2,'mask', [1 1 1 0 0 0]);%根据终止点位姿,得到终止点关节角
[q ,qd, qdd]=jtraj(q1,q2,50); %五次多项式轨迹,得到关节角度,角速度,角加速度,50为采样点个数
T=robot.fkine(q);%根据插值,得到末端执行器位姿
T_t = transl(T);
figure
plot(T_t);
legend('x','y','z');
figure
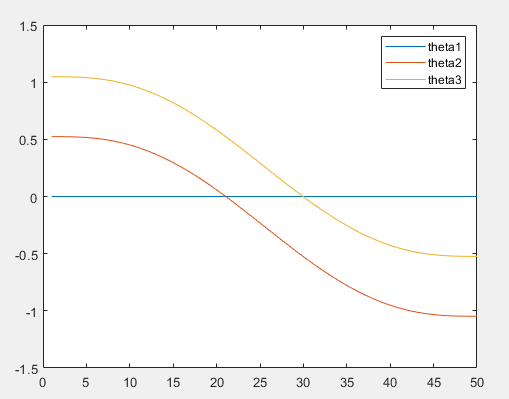
plot(q);
legend('theta1','theta2','theta3');
nT=T.T;
figure
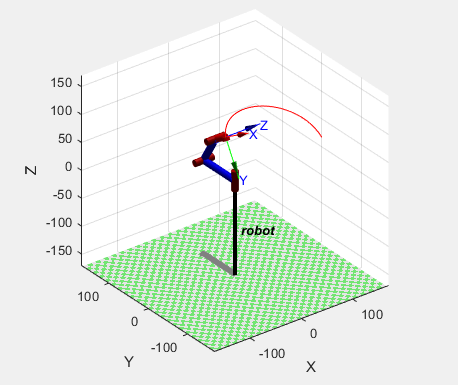
plot3(squeeze(nT(1,4,:)),squeeze(nT(2,4,:)),squeeze(nT(3,4,:)));%输出末端轨迹
hold on
robot.plot(q);%动画演示
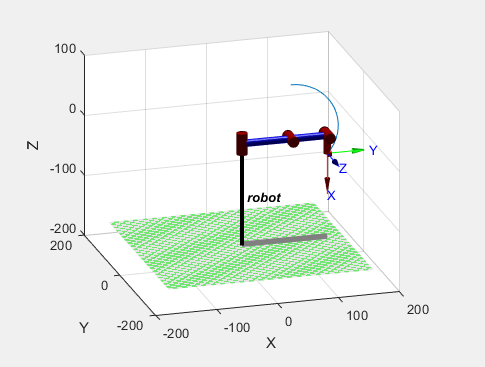
运行结果:
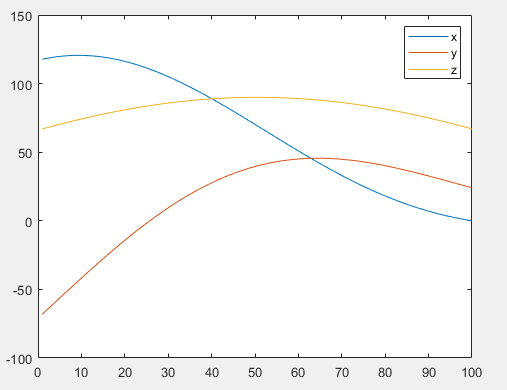
正运动学实现:
给定三个关节角度
clear ; clc; close all;
% 机器人各连杆DH参数
d1 = 0;
d2 = 0;
d3 = 0;
a1 = 80;
a2 = 60;
a3 = 30;
alpha1 = 0.5 * pi;
alpha2 = 0 ;
alpha3 = 0;
% 定义各个连杆,默认为转动关节
% theta d a alpha
L1=Link([ 0 d1 a1 alpha1]); L(1).qlim=[-pi,pi];
L2=Link([ 0 d2 a2 alpha2]); L(2).qlim=[-pi,pi]; L2.offset=pi/3;
L3=Link([ 0 d3 a3 alpha3]); L(3).qlim=[-pi,pi]; L3.offset=-pi/3;
robot=SerialLink([L1 L2 L3],'name','robot');
%%正运动学仿真
%给定角度信息
joint(: , 1) = linspace(-pi/6,pi/2,100);
joint(: , 2) = linspace(0,pi/3,100);
joint(: , 3) = linspace(pi/6,pi/2,100);
robot.plot(joint ,'jointdiam',1,'fps',100,'trail','r-')
T = robot.fkine(joint);
T_t = transl(T);
figure
plot(T_t);
legend('x','y','z');
figure
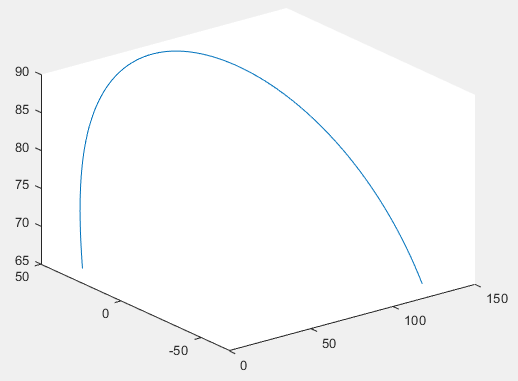
nT=T.T;
plot3(squeeze(nT(1,4,:)),squeeze(nT(2,4,:)),squeeze(nT(3,4,:)));%输出末端轨迹
运行结果:
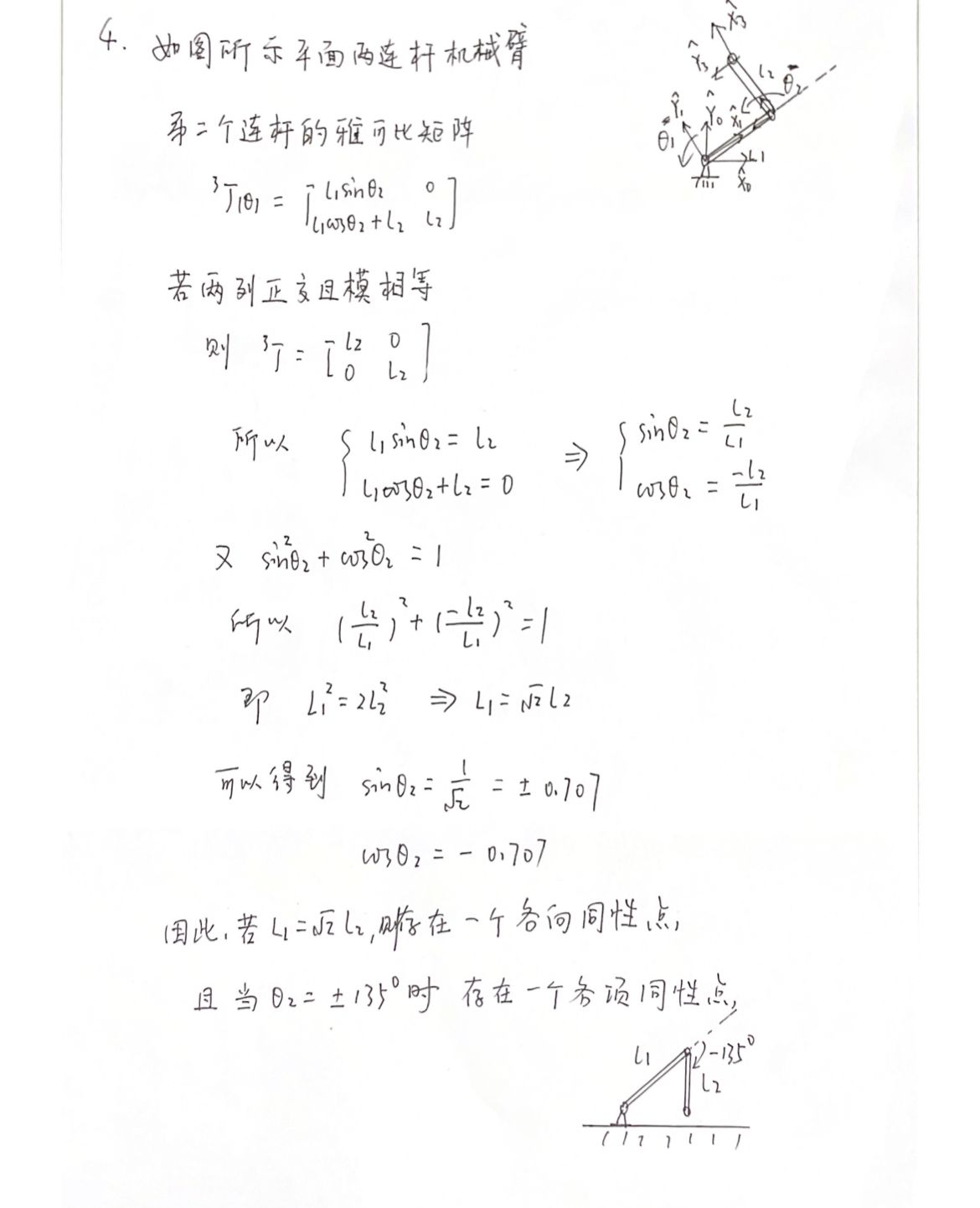
4.平面两连杆机械臂求出存在的各向同性点
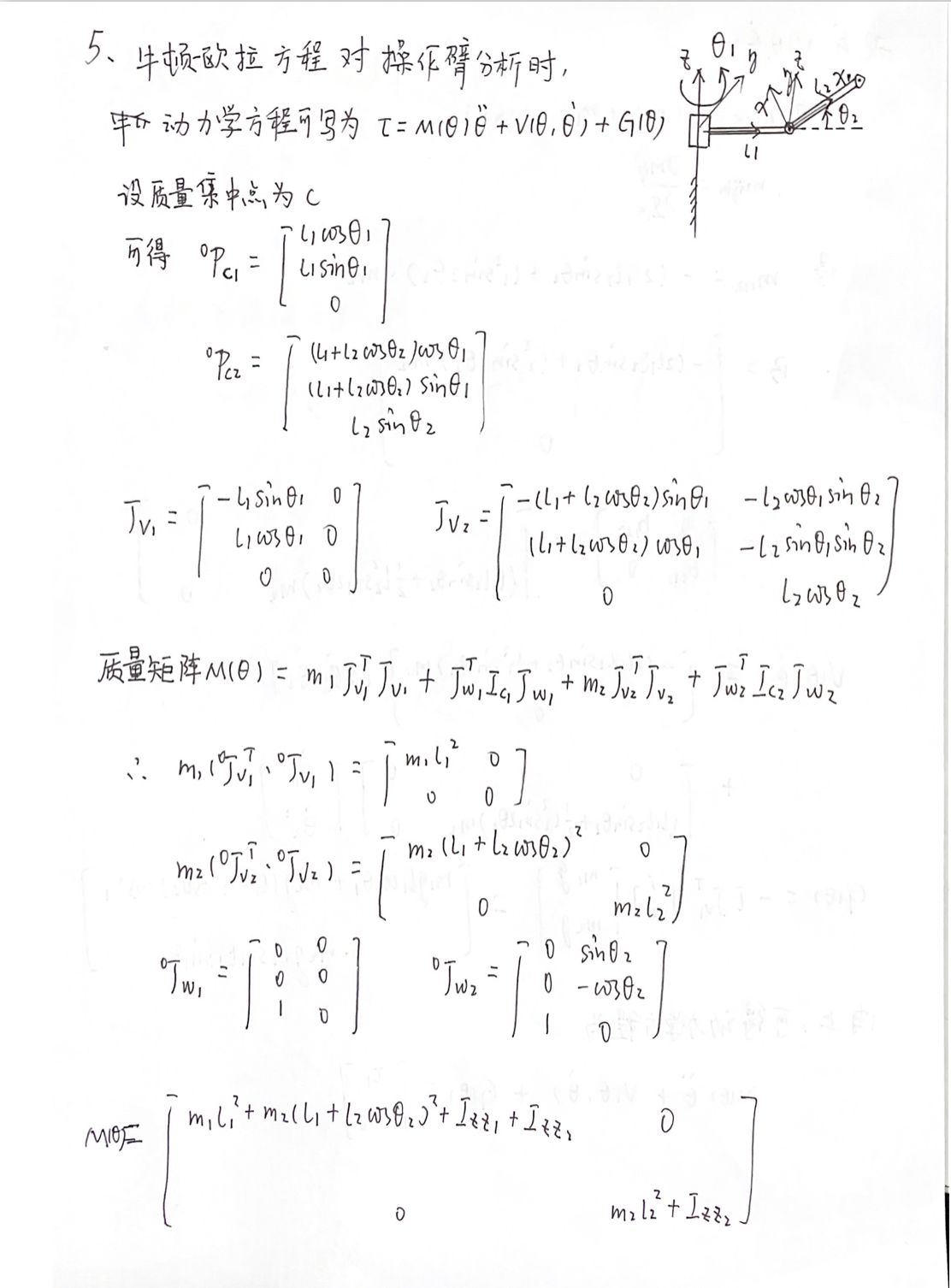
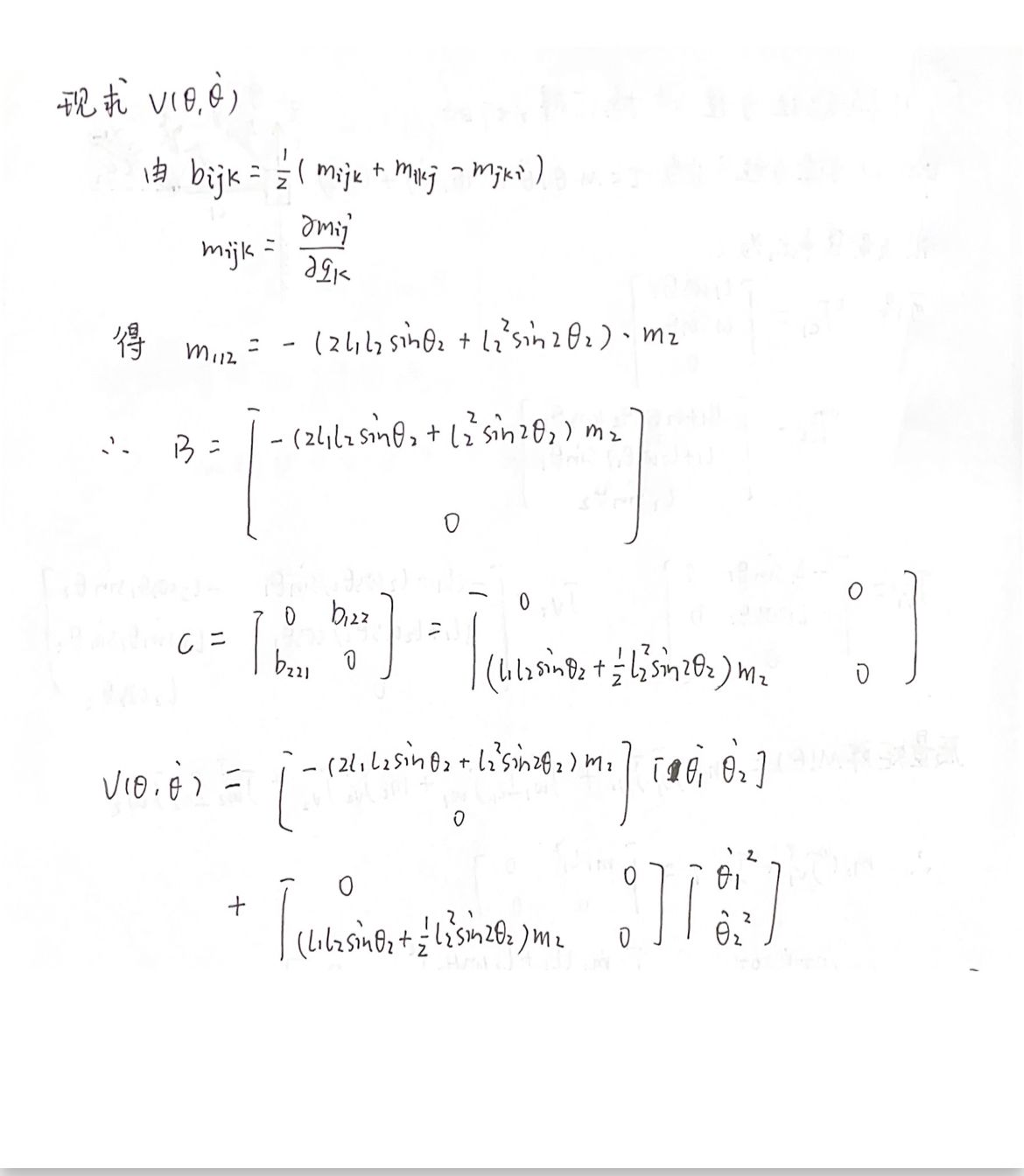
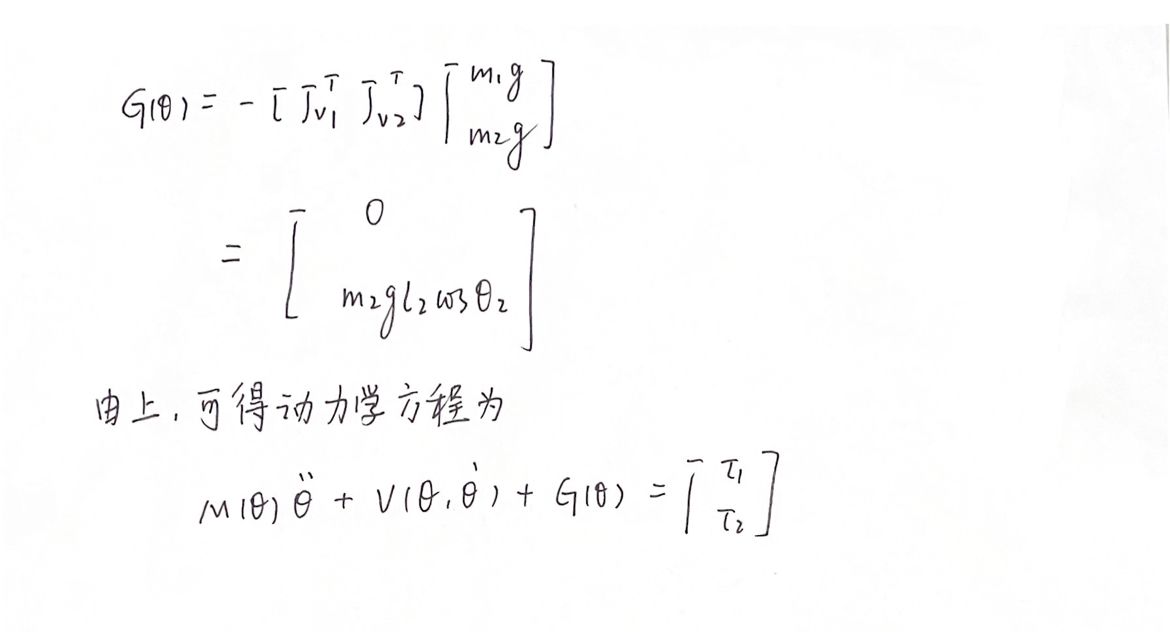
5.用牛顿-欧拉法或拉格朗日法建立其动力学方程
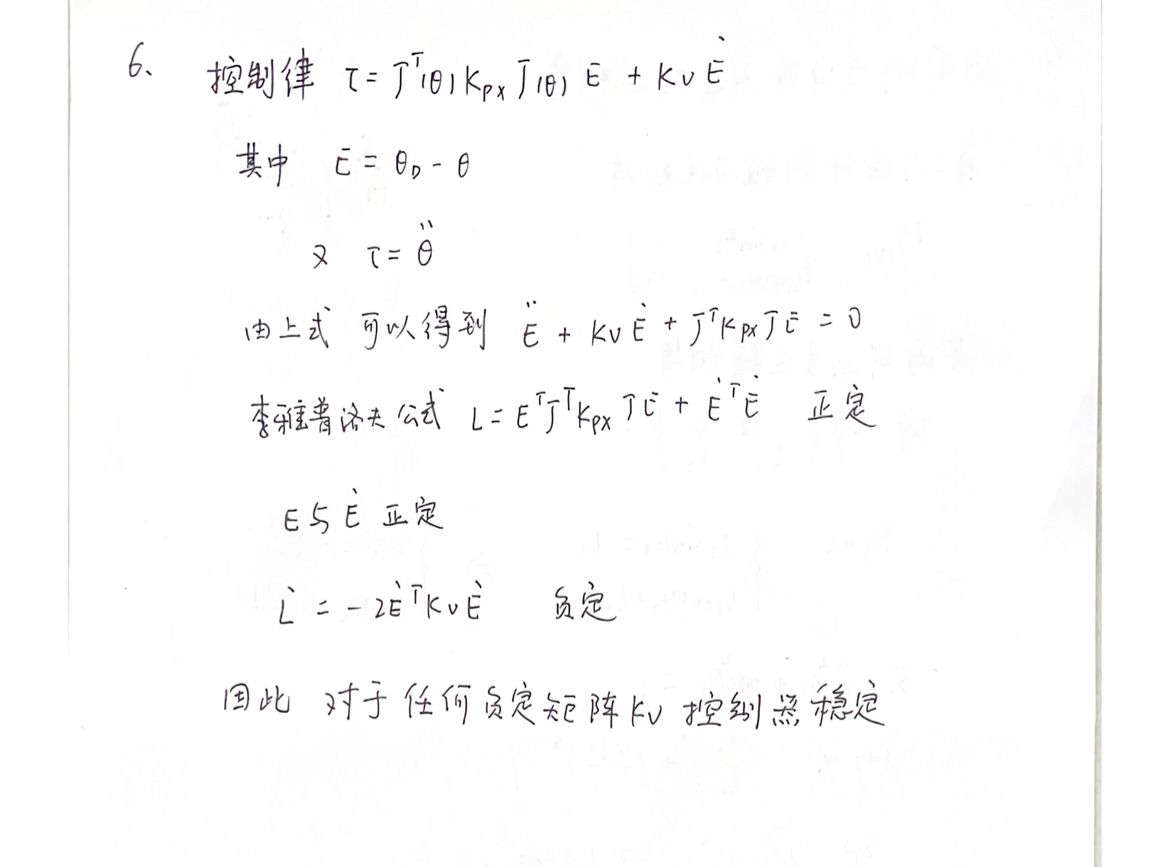
6.证明对于任何负定矩阵kv,这个控制器是稳定的
2022.5.28更新:成绩出来了,得了个良好

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)