(机器人学导论--运动学)(五)机械臂轨迹规划:三次多项式
文章目录轨迹Joint Space下的轨迹规划三次多项式规划以矩阵的方式运算如何选择速度和加速度Example: A trajectory with one via point一般情况Example: A RRR Manipulator笛卡尔坐标系下规划关节坐标系下规划轨迹轨迹即是机械臂末端点或者某操作点的位置速度加速度的历程理想轨迹Joint Space下的轨迹规划定义机械臂末端点相对于物体的初
·
文章目录
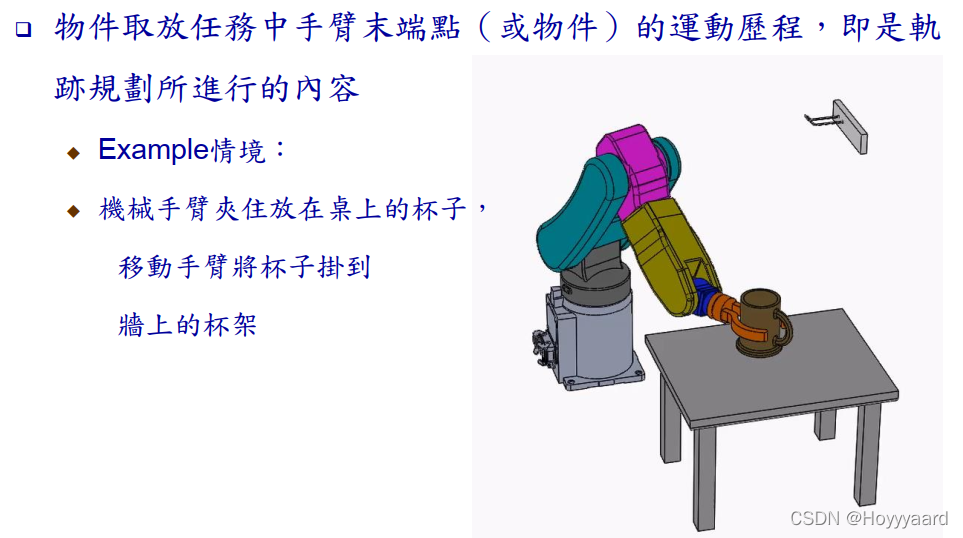
轨迹
- 轨迹即是机械臂末端点或者某操作点的位置速度加速度的历程
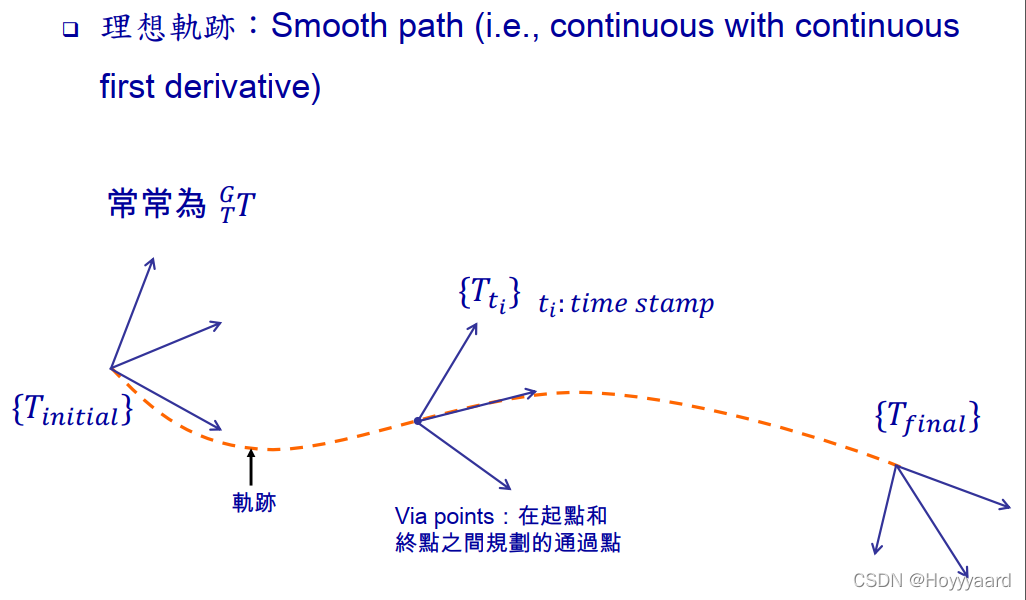
- 理想轨迹
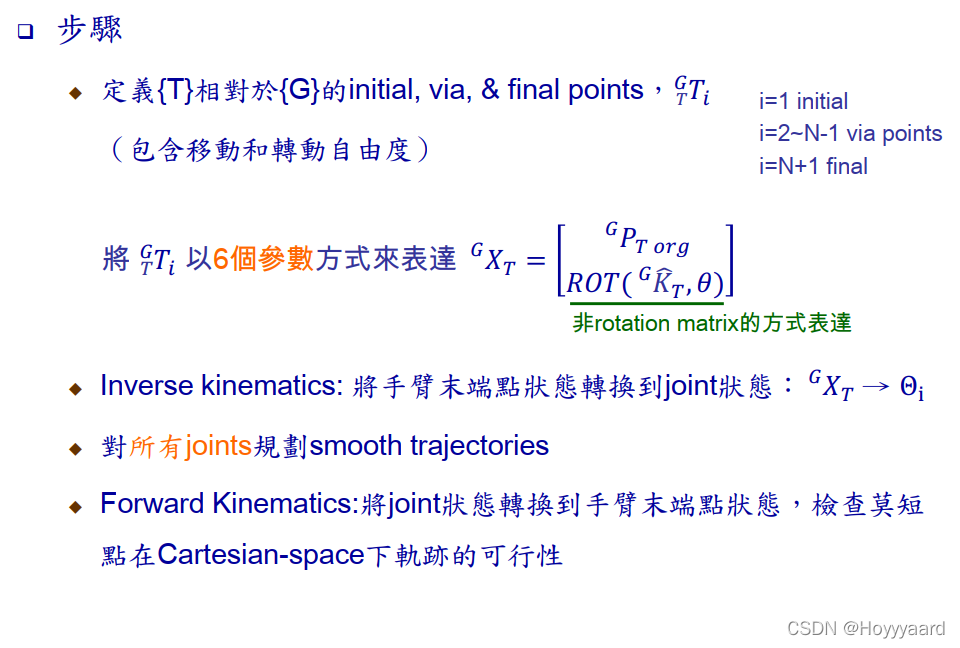
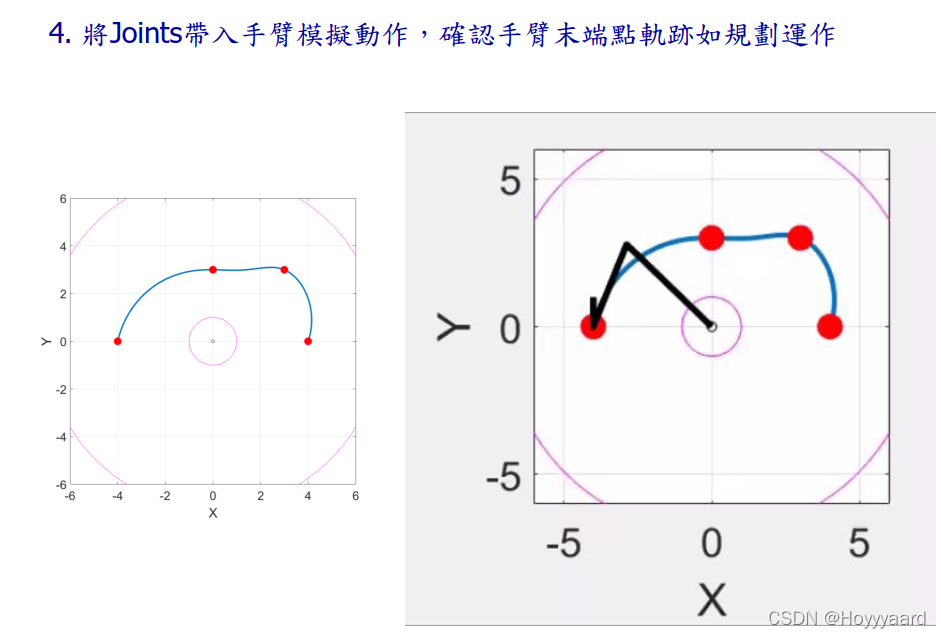
Joint Space下的轨迹规划
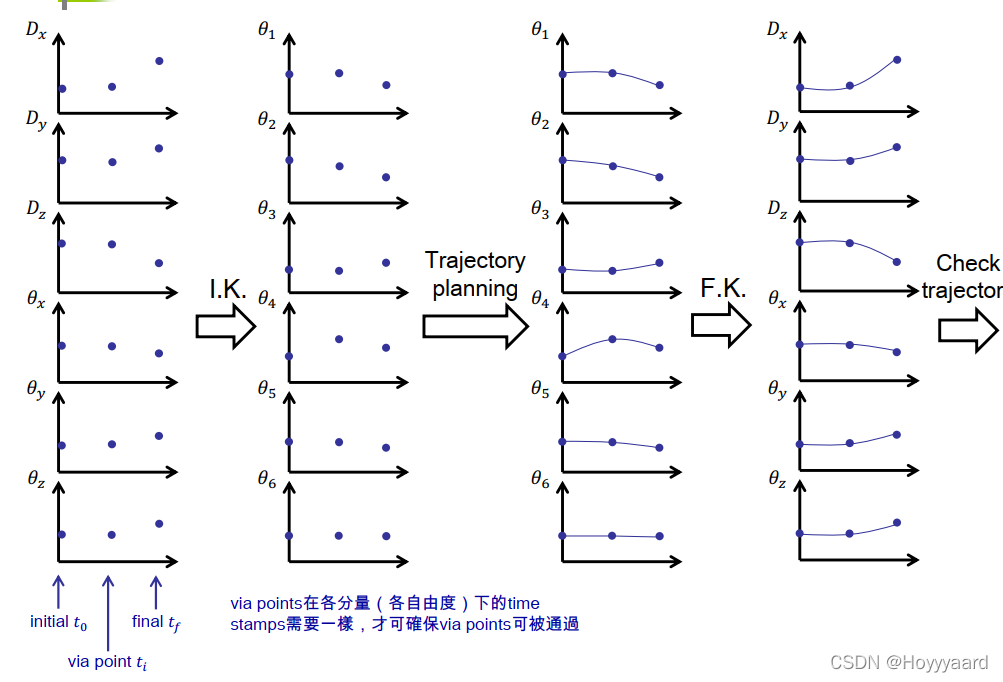
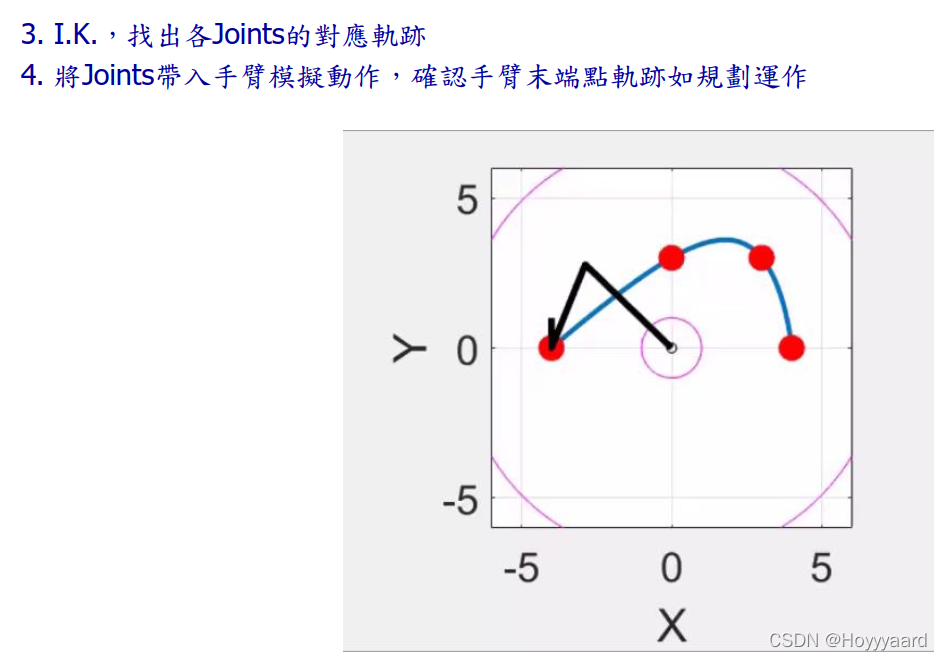
- 定义机械臂末端点相对于物体的初始位置、中间位置、最终位置的转移矩阵
- 由转移矩阵通过IK得到每个Joint的θ
- 将所有θ进行轨迹规划
- FK验证结果
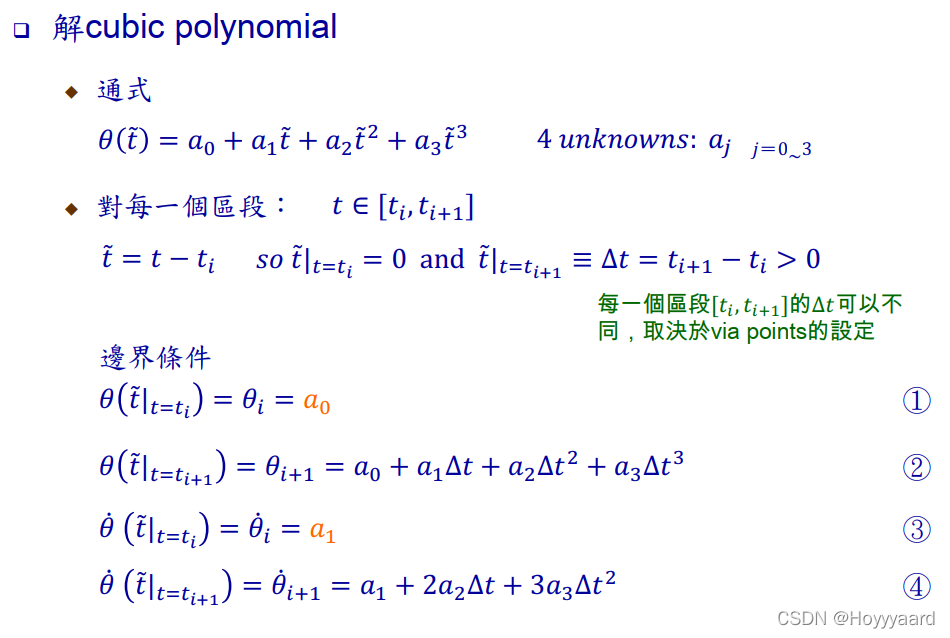
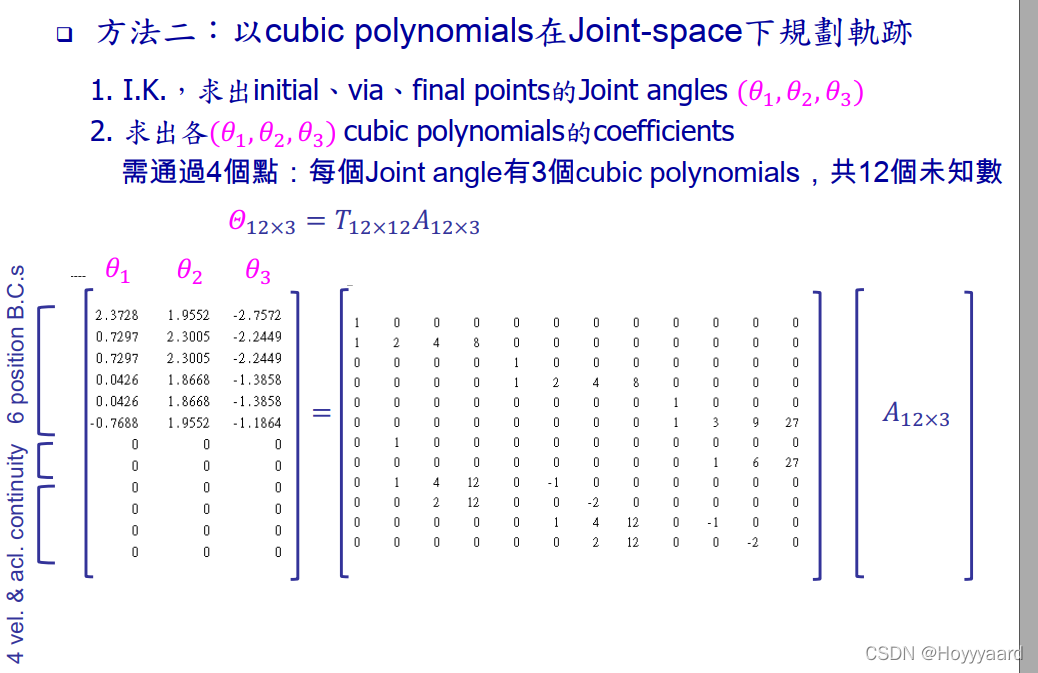
三次多项式规划
- 每两点之间用一个三次多项式表示
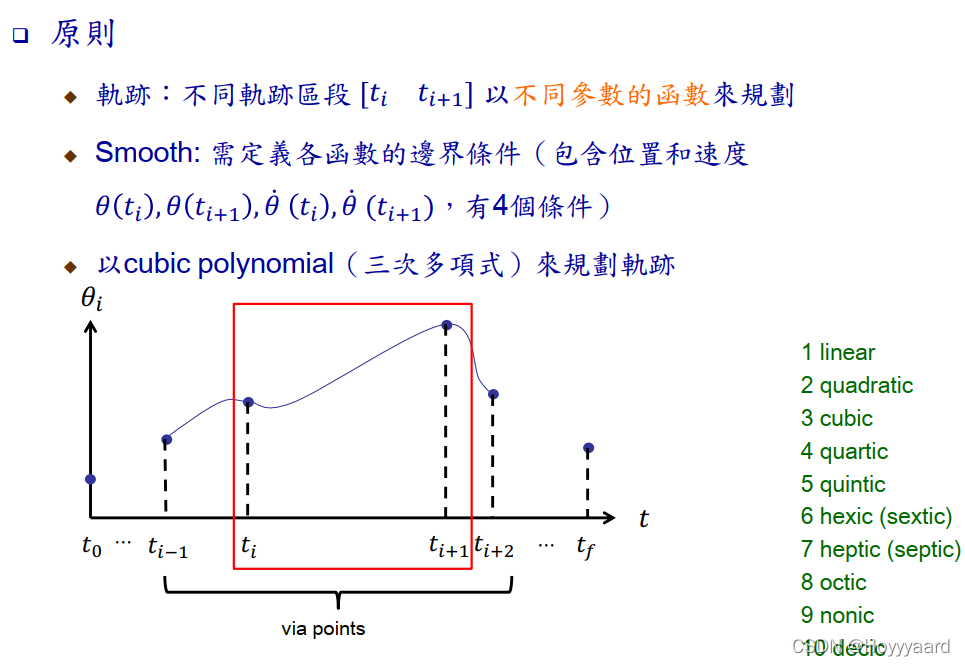
- 4个已知边界条件(两个点的速度和加速度为达到smooth的效果需要前后一致)
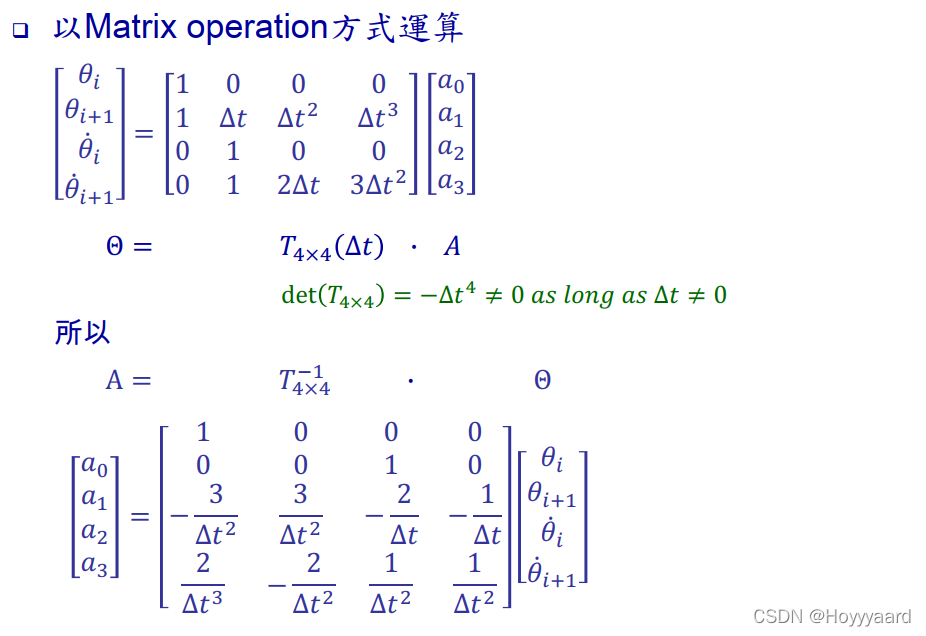
以矩阵的方式运算
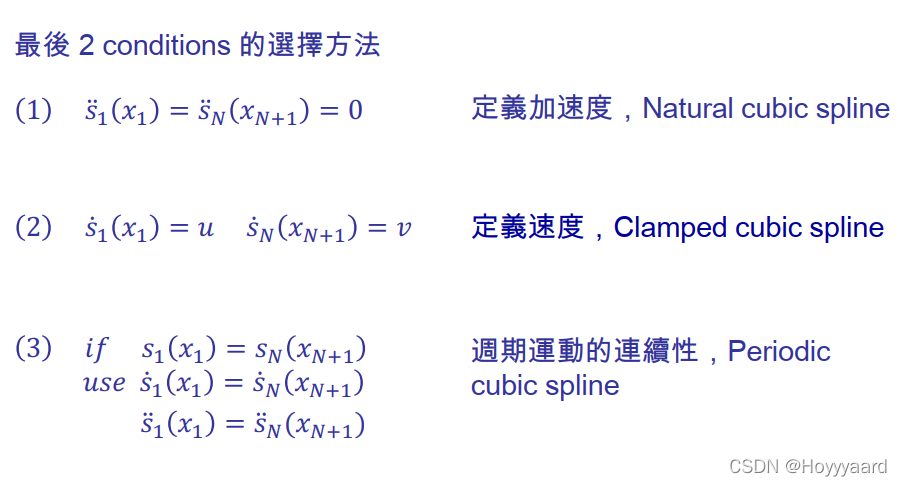
如何选择速度和加速度
- 速度
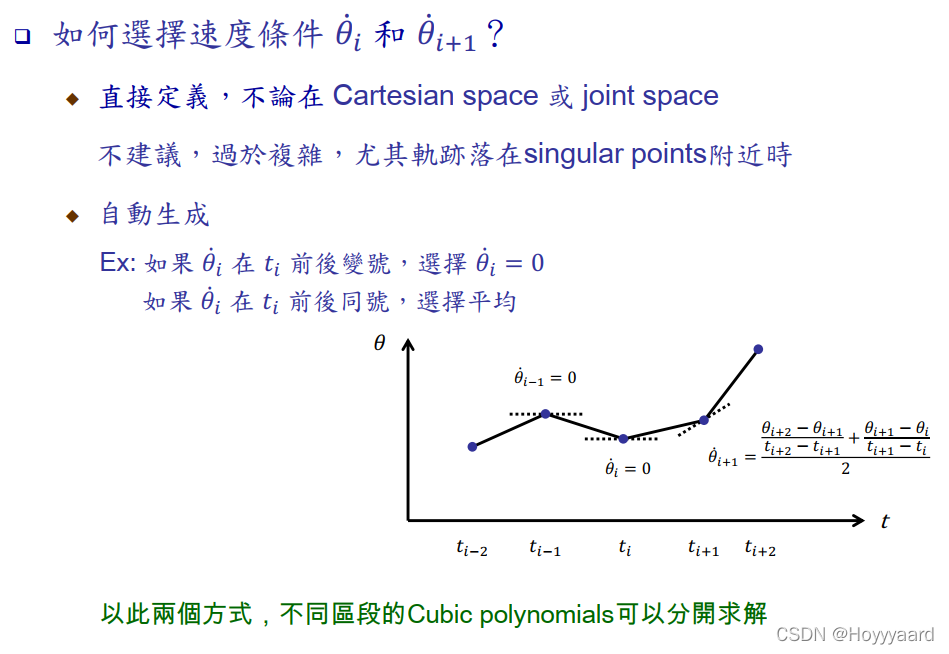
- 加速度需连续
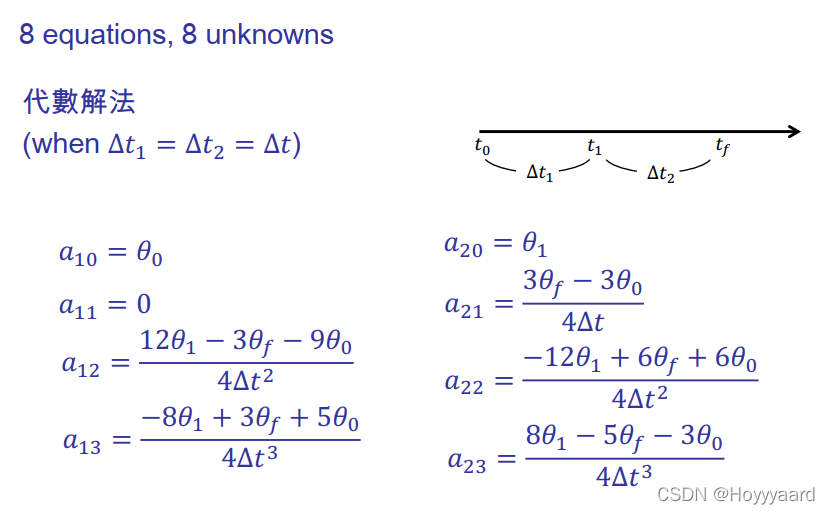
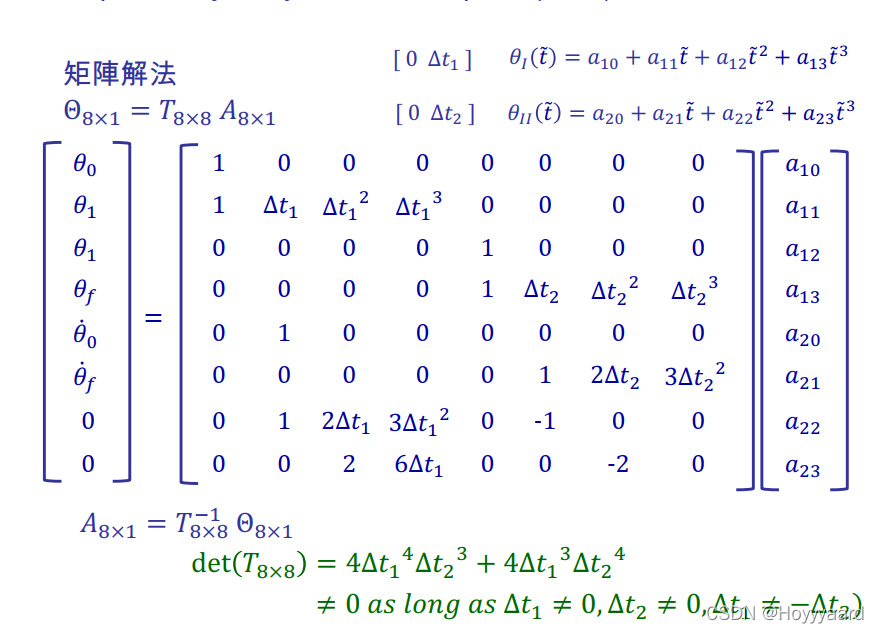
Example: A trajectory with one via point
- 分别用两个多项式表达两段轨迹
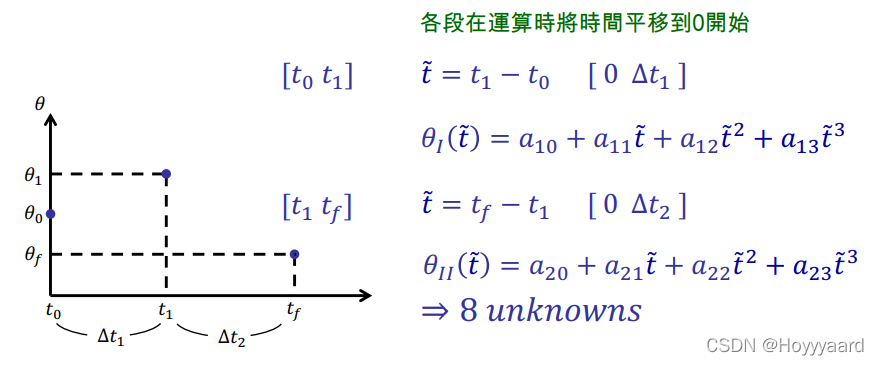
- 已知条件:4个位置信息 起始点和终点的速度信息*2 中间点的前后速度和加速度两段轨迹要一致 * 2 = 8
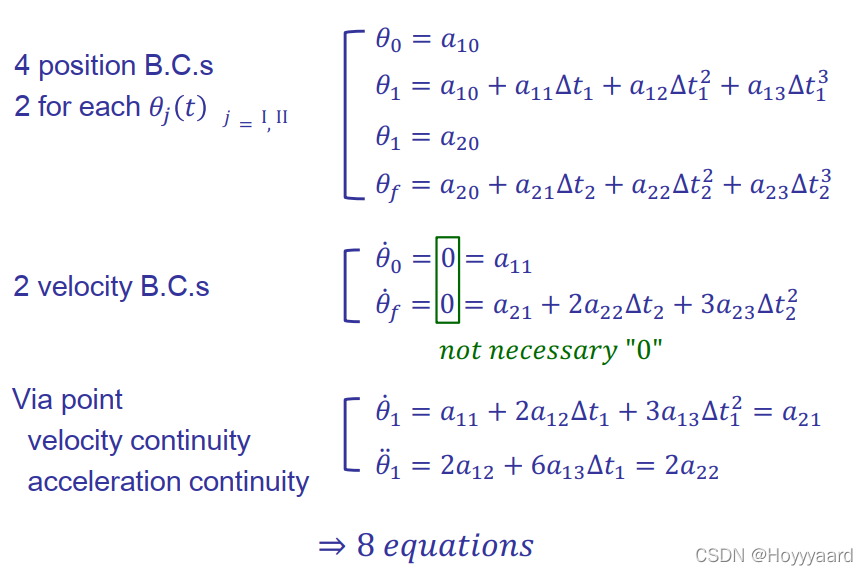
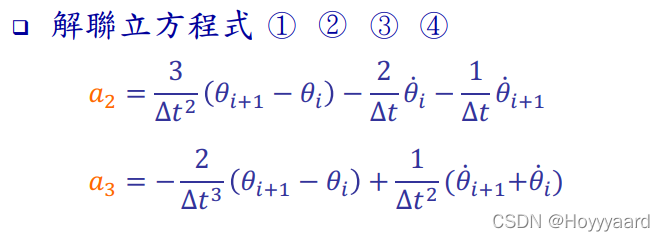
- 代数求解
- 矩阵求解
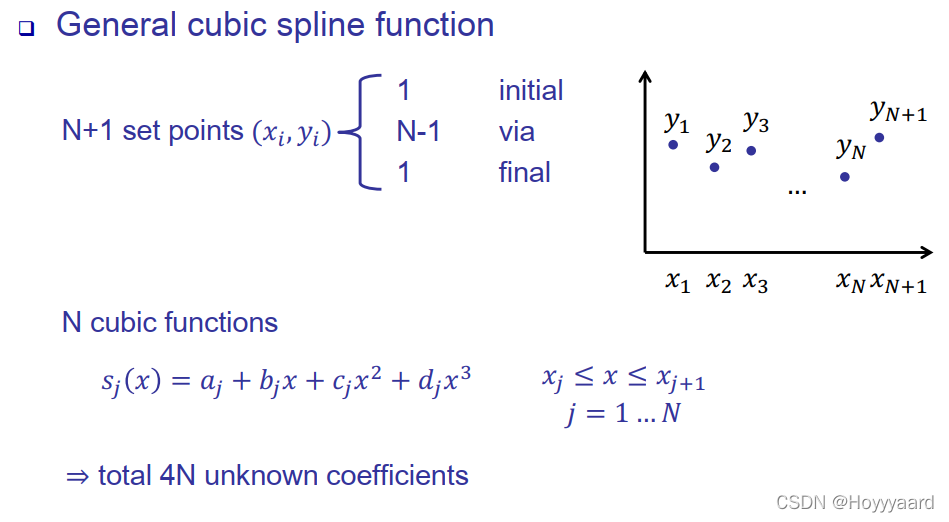
一般情况
- N+1个轨迹点 4N个未知数
- 位置信息可建立2N个等式
- 中间点的速度和加速度可以建立2(N-1)个等式
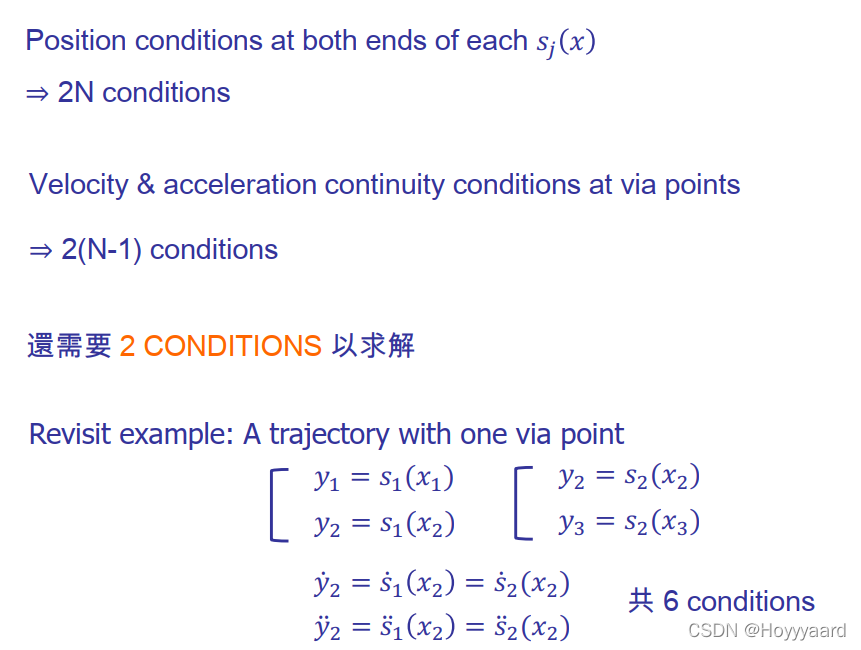
- 最后两个等式靠起始点和终点的速度和加速度建立
Example: A RRR Manipulator
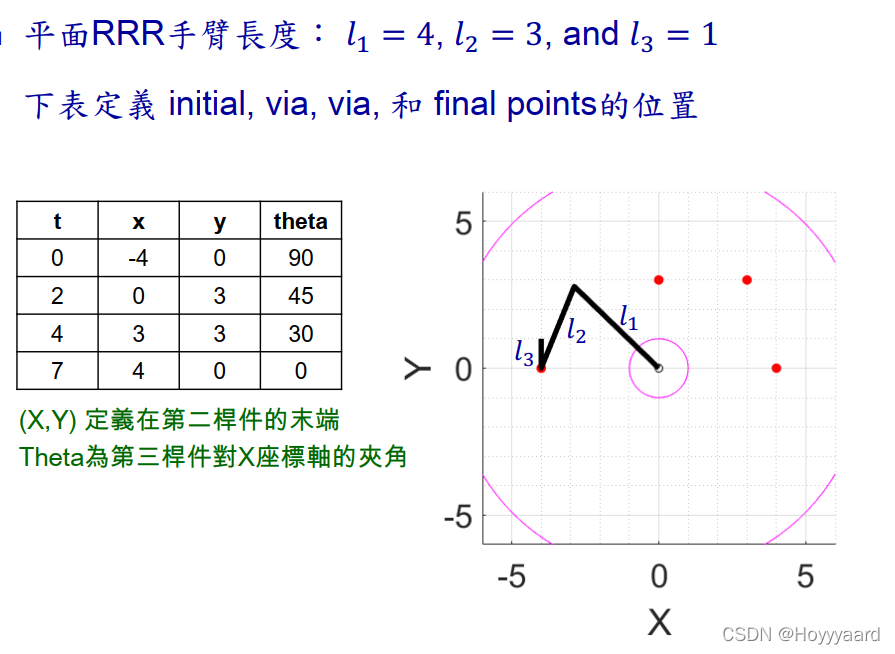
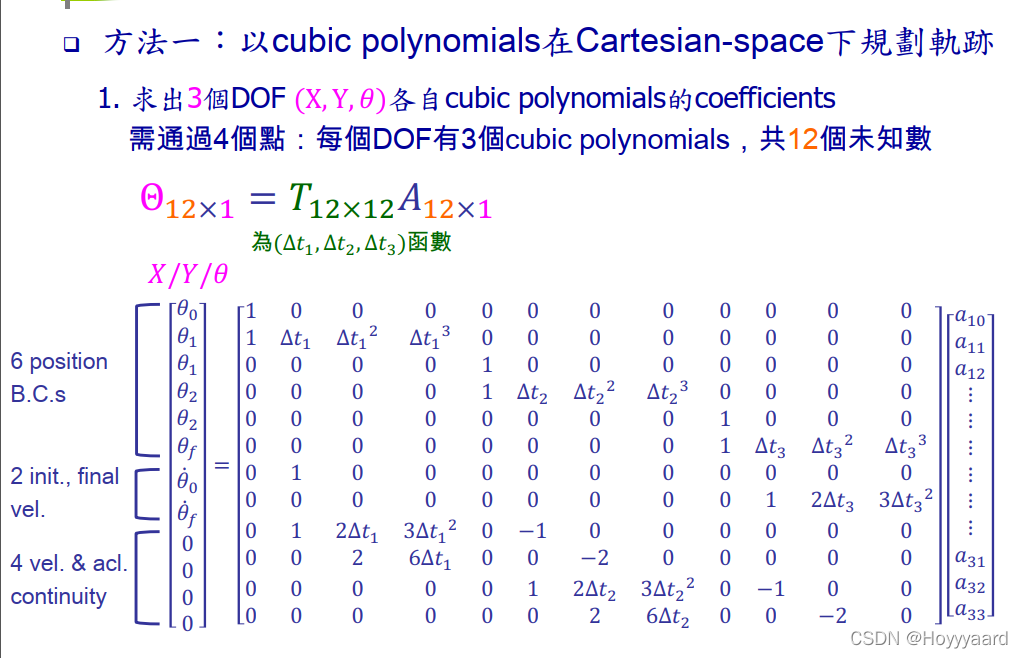
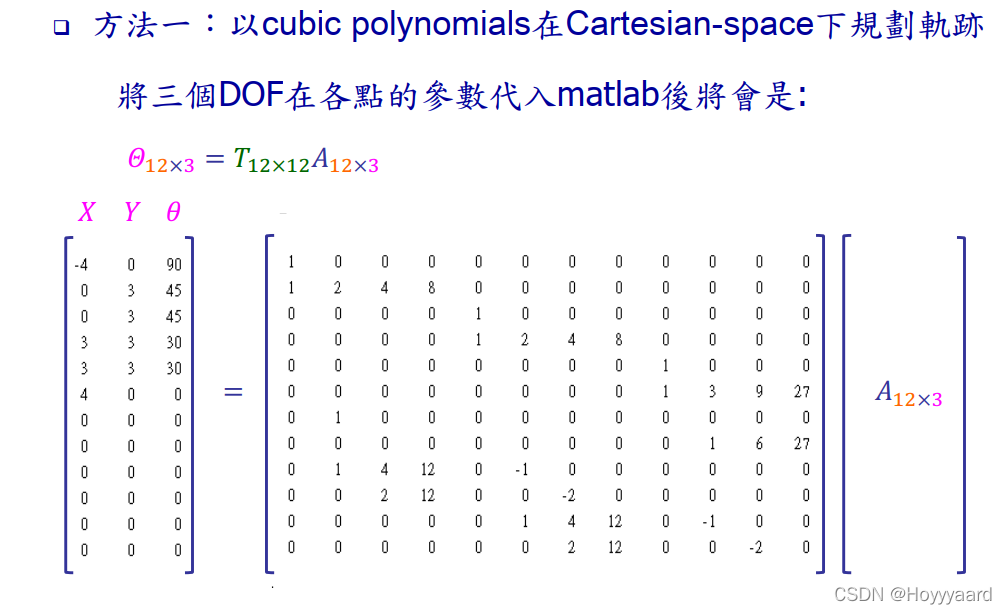
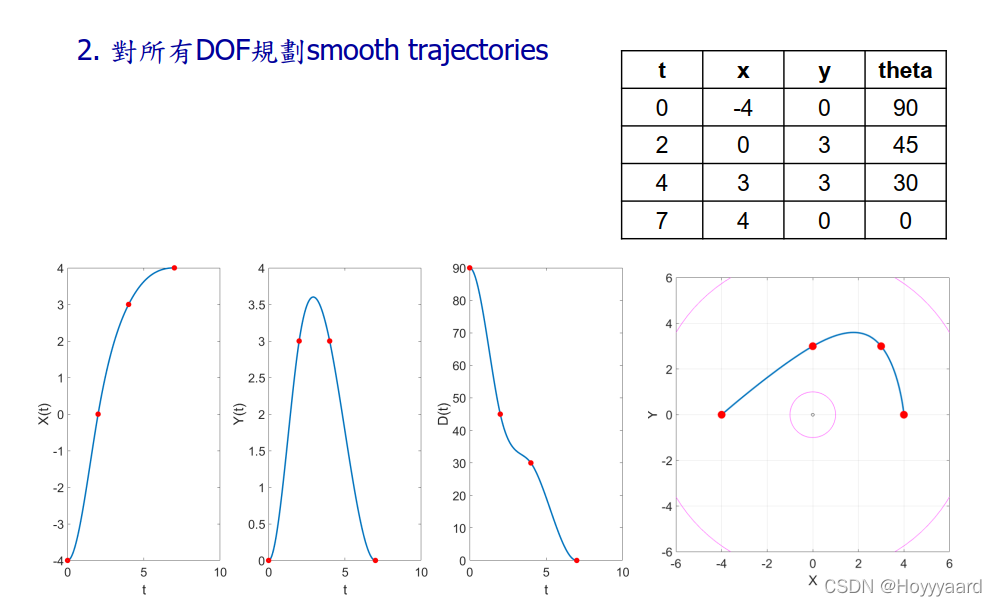
笛卡尔坐标系下规划
- 直接使用 xyθ规划
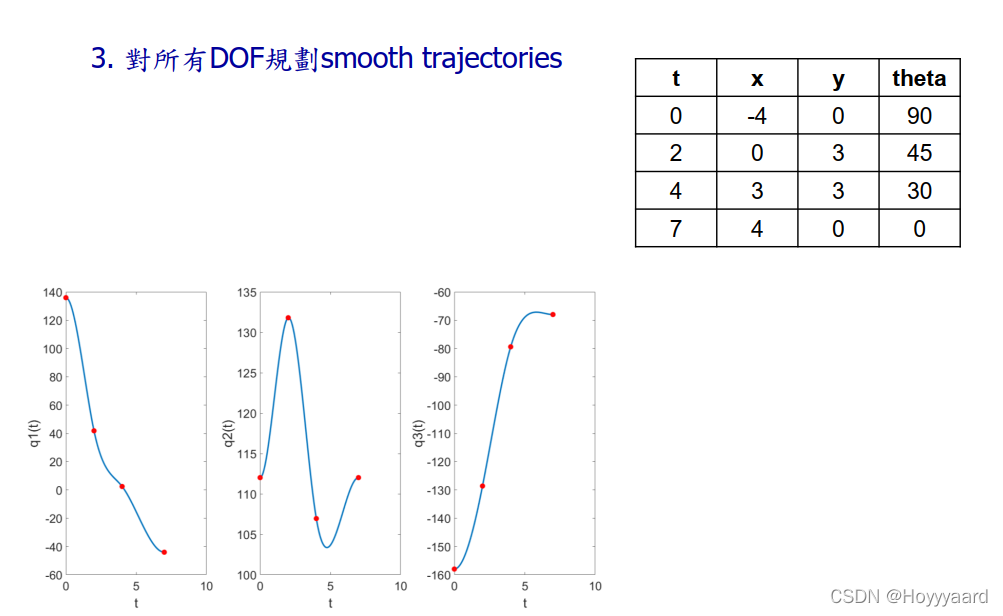
关节坐标系下规划
点击阅读全文

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 2
2 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容
7日热学榜
活动日历
查看更多
活动时间 2025-01-01 00:00:00

丁奇:MySQL高频面试题详解

活动时间 2025-01-01 00:00:00

AI 大模型应用开发 · 实战营
活动时间 2025-01-01 00:00:00

AI系列课程-IT全学科自学科
活动时间 2025-01-01 00:00:00

3 小时掌握 Prompt 核心技巧与 GPT 技术理论
活动时间 2025-01-01 00:00:00

0基础2个月拿下软考高级证书体验课


所有评论(0)