
写文章




- @zmkzmkok
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
VIO系列——从滤波和优化的角度研究视觉惯性里程计
A review of visual inertial odometry from filtering and optimisation perspectives
深度学习系列——onnx, onnxruntime, netron
onnx, onnxruntime, netron

深度学习系列——onnx, onnxruntime, netron
onnx, onnxruntime, netron
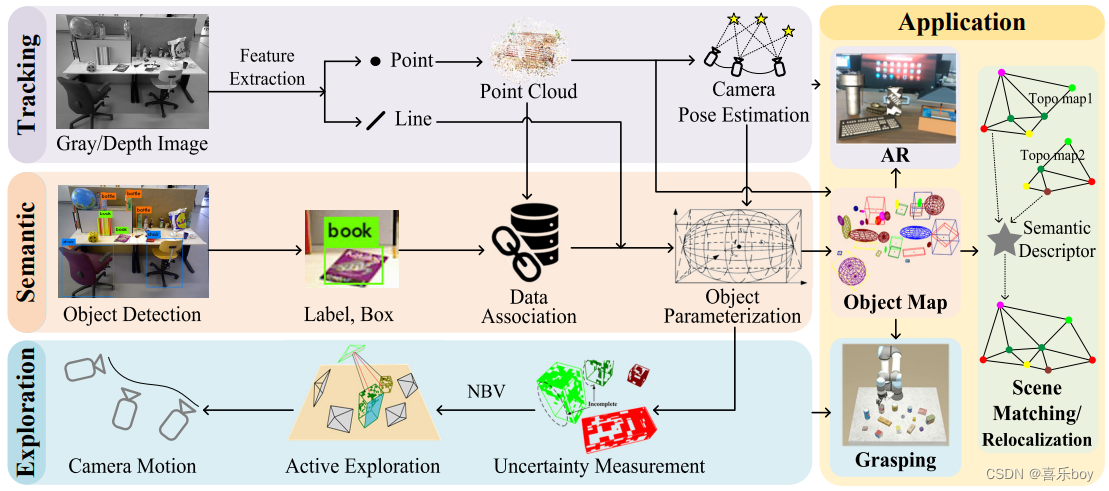
SLAM系列——机器人顶刊T-RO!用于关联、建图和高级任务的物体级SLAM框架
Object SLAM被认为对于机器人高层次感知与决策制定越来越重要。本文提出一个综合的object SLAM框架,该框架专注于基于object的感知和面向object的机器人任务。首先,我们提出了一种集成数据关联方法,用于通过结合参数和非参数统计测试来关联复杂条件下的对象。此外,我们提出基于iForest和线对齐的对象建模的离群鲁棒质心和尺度估计算法。然后由估计的通用对象模型表示轻量级和面向对象
到底了