- @zl_vslam
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本节以伴随跟BCH公式为基础,直接推导了左乘扰动后的雅可比矩阵,并且最终结论与上节完全一致,相对上节的推导,单个求扰动后的雅可比更加简洁,更加容易理解,不过实现路径虽有不同,最终结论确是一致的,因此可以得出一个结论,再求解雅可比矩阵的时候,选择合适的扰动方式,往往能事半功倍。
本文讲解SLAM中相对位姿约束(BetweenFactor)的数学推导,重点分析基于李群李代数的残差和雅可比求解方法。该约束广泛应用于位姿图中的相邻帧约束和回环检测。文章从李代数表示出发,通过引入左扰动模型,推导两顶点(Ti,Tj)的雅可比矩阵,并利用BCH近似和伴随性质将扰动项移至等式两侧。证明过程涉及SO(3)旋转性质和平移部分的数学推导,为后续自动求导和数值求导提供理论基础。

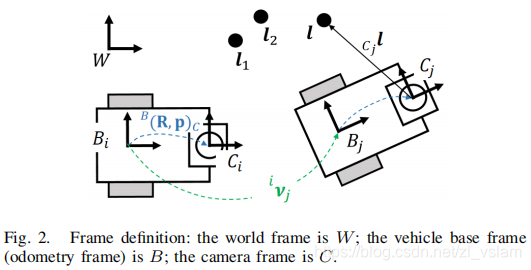
解析论文名称是:Visual-Odometric Localization and Mapping for Ground Vehicles Using SE(2)-XYZ Constraints代码的github地址是:https://github.com/izhengfan/se2lam时隔多年,其实也没几年,决定开始写第二篇博客,选择该主题的原因是,在研究IMU预积分的时候,很多地方...
本文补充介绍了四元数表示位姿的方法,重点讨论了如何利用视觉3D到2D重投影误差构建残差函数并计算雅可比矩阵。相比轴角和李群李代数参数化,四元数提供了一种有效的位姿表示方式,可用于优化相机姿态估计中的重投影误差。文章内容涉及位姿参数化的不同方法及其在视觉SLAM中的应用,特别是基于重投影误差的优化计算过程。
本节主要讲解了预积分在SLAM(同步定位与地图构建)中的应用,特别是如何利用SO(2)李代数进行优化。首先介绍了SO(2)的定义及其李代数so(2),包括指数映射和对数映射,这些工具用于描述二维旋转的局部扰动或增量。接着,讨论了在SLAM中如何利用这些数学工具进行优化问题、扰动模型和插值。此外,还详细介绍了预积分残差和雅可比矩阵的推导,这些在IMU应用中用于优化状态变量,如旋转、平移、线速度和IM