- @zhongguan001
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
由于MANUS数据手套拇指数据的节点结构与Revo 3拇指并不直接对应,因此拇指需要采用不同的重定向方法。BrainCo并非仅仅依赖关节角度,而是利用 MANUS 指尖传感器数据来追踪操作者拇指的位置,并将该位置作为机器人拇指的目标位置。BrainCo 利用关节角度数据,将操作者在食指、中指、无名指和小指上的动作映射到 Revo 3 的相应手指上。时,来自Revo 3的触觉信号也可以转换为操作员相

由于MANUS数据手套拇指数据的节点结构与Revo 3拇指并不直接对应,因此拇指需要采用不同的重定向方法。BrainCo并非仅仅依赖关节角度,而是利用 MANUS 指尖传感器数据来追踪操作者拇指的位置,并将该位置作为机器人拇指的目标位置。BrainCo 利用关节角度数据,将操作者在食指、中指、无名指和小指上的动作映射到 Revo 3 的相应手指上。时,来自Revo 3的触觉信号也可以转换为操作员相
便携性也让他们能够将所有声音集中在一个地方:领夹式麦克风安装在动作捕捉服上,录音师像在电影片场一样在房间里工作,玩家在游戏中听到的大部分对话都是在拍摄当天现场录制的,而不是后期替换的。最终,他们打造出了一款远超预算的游戏,而团队也收获了宝贵的制作经验,并在 Steam 和 Epic 平台推出了他们的首款作品。游戏在Steam和Epic游戏商城上线,拥有电影级的规模、栩栩如生的角色表演以及超过十个结

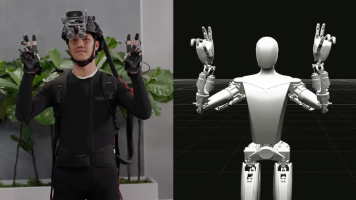
MANUS数据手套是机器人世界模型构建的核心高精度数据采集设备,能为其提供高保真的真实手部运动数据支撑。核心技术优势它采用EMF电磁追踪技术,实现毫米级精度的25自由度手部动作捕捉,无遮挡、无漂移,可完整记录每一处关节的细微动作,输出符合解剖学特征的手部运动数据集。典型落地应用在NVIDIA DreamDojo项目中,MANUS手套采集的高精度手部姿态数据,可直接映射到Fourier GR

MANUS数据手套是机器人世界模型构建的核心高精度数据采集设备,能为其提供高保真的真实手部运动数据支撑。核心技术优势它采用EMF电磁追踪技术,实现毫米级精度的25自由度手部动作捕捉,无遮挡、无漂移,可完整记录每一处关节的细微动作,输出符合解剖学特征的手部运动数据集。典型落地应用在NVIDIA DreamDojo项目中,MANUS手套采集的高精度手部姿态数据,可直接映射到Fourier GR
整机重量约1763g,同样搭载20自由度全独立驱动关节,额定包络负载10公斤、最大可达20公斤,捏握负载最高5公斤,采用工业级高强度结构设计,适配高周期作业场景,是工业精密装配、高负载科研实验的主力型号。2026年2月推出的亚公斤级产品,整机重量仅880g,搭载20个独立驱动自由度,尺寸接近成人手掌,最大包络负载可达12公斤,原生支持ROS2,专为各类人形机器人平台优化,大幅降低集成开发门槛。Te

可在精密制造、医疗康复等场景实现精细手势控制,同步采集手部动作与触觉数据,辅助机器人学习人类的灵巧操作技能,完成高难度的接触类任务。为具身智能系统提供高保真的手部交互数据集,支撑AI理解物理世界的接触逻辑,是机器人学、运动生物力学等研究领域的核心数据采集工具。在VR/AR环境中为工业、医疗等领域的实操培训提供真实触觉反馈,大幅提升虚拟装配、精细手术模拟等场景的沉浸感与训练效果。可精准捕捉全手25个

可在精密制造、医疗康复等场景实现精细手势控制,同步采集手部动作与触觉数据,辅助机器人学习人类的灵巧操作技能,完成高难度的接触类任务。为具身智能系统提供高保真的手部交互数据集,支撑AI理解物理世界的接触逻辑,是机器人学、运动生物力学等研究领域的核心数据采集工具。在VR/AR环境中为工业、医疗等领域的实操培训提供真实触觉反馈,大幅提升虚拟装配、精细手术模拟等场景的沉浸感与训练效果。可精准捕捉全手25个
这种算法通过优化指导动作的策略,使机器人能够通过最大化成功行为的奖励来学习行走或平衡等复杂任务。StyleLoco是一种融合强化学习与对抗性模仿学习的全新框架,它使人形机器人能够以敏捷性与自然美感兼具的方式执行多样化运动任务,在性能表现与真实感之间架起桥梁。动作匹配是动画和机器人技术中的一种技术,用于根据当前条件选择最合适的动作序列。通过将所需动作与现有动作数据进行匹配,机器人能够实现更具响应性且
在这个频道上,我们想分享我们基于灵巧手技术的最新体验。搜维尔科技与TESOLLO总部签署代理合作协议,成为其在中国大陆地区的授权代理经销商。搜维尔科技现支持相关产品购买、咨询与售后支持等服务,欢迎垂询。TESOLLO DG-5F是一款高度仿生的五指机械灵巧手,专为需要精细操作和高度灵活性的应用场景设计。为DG系列夹持器(DG-2F、DG-3F-B、DG-3F-2、DG-4F、DG-5F)与标准型号