- @zhao_ke_xue
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
如何打造自己私人知识库(Typora + PicGO+阿里云OSS)1、本期推荐方案方案介绍:本地书写:Typora:优秀的Markdown文档编写工具,自带内容检索功能。图床:阿里云OSS:高速访问图片,付费,最低每年9元。云端管理:Git:管理本地笔记仓库、上传到Github/Gitee版本可追溯,看个人喜好。方案优点:风险低(图床失效)、除非阿里云OSS不维护了。图床以及云端(阿里云OSS)
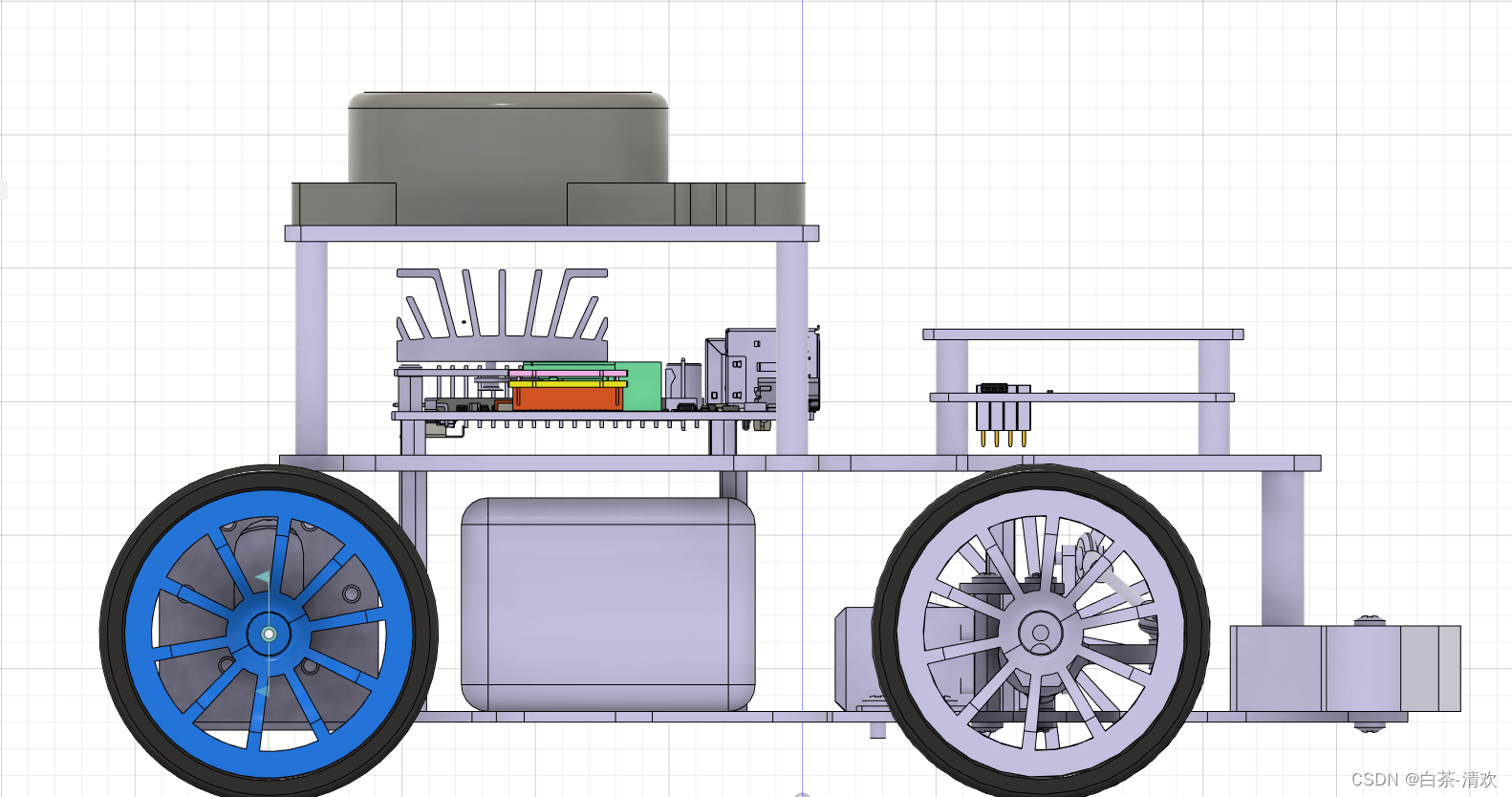
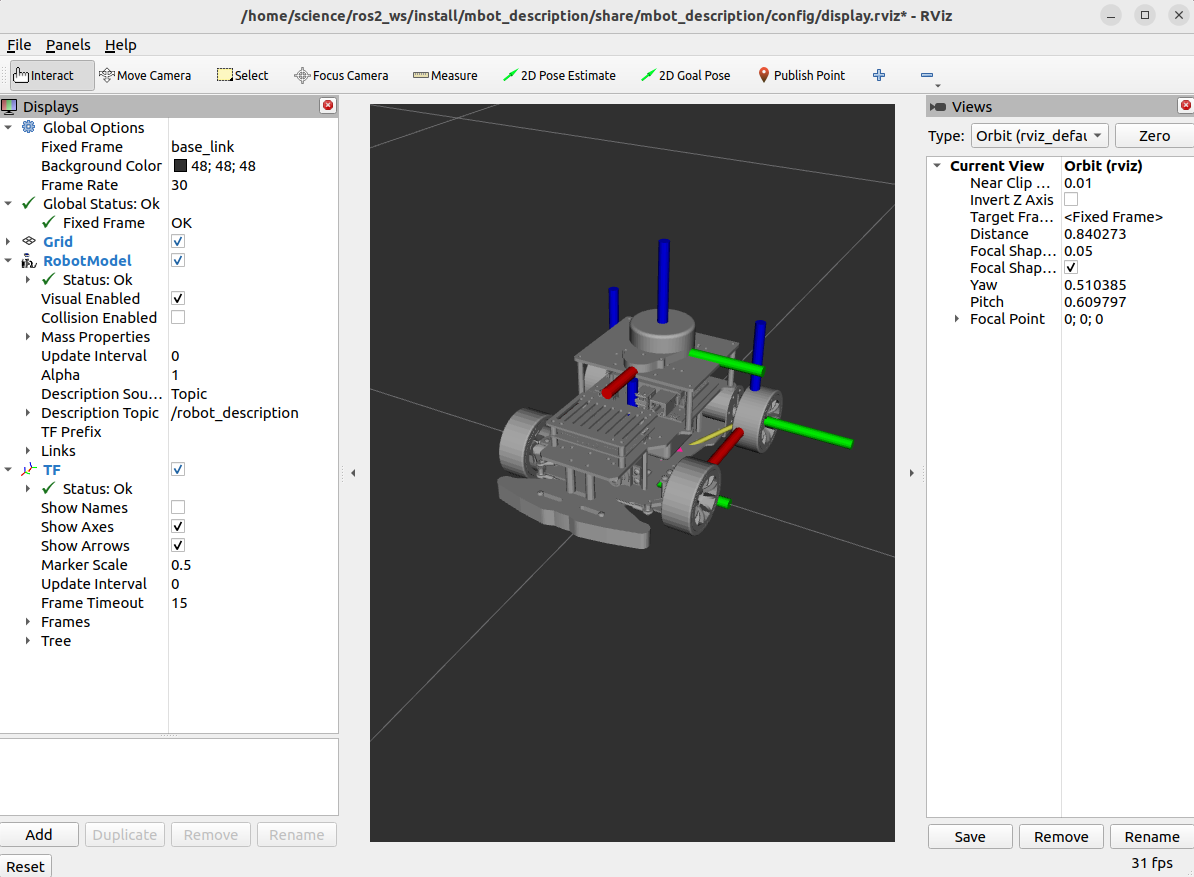
以上的内容用主要完成的使用Fusion 360 建模软件,导出ROS2中所需的机器人描述文件功能包。
如何打造自己私人知识库(Typora + PicGO+阿里云OSS)1、本期推荐方案方案介绍:本地书写:Typora:优秀的Markdown文档编写工具,自带内容检索功能。图床:阿里云OSS:高速访问图片,付费,最低每年9元。云端管理:Git:管理本地笔记仓库、上传到Github/Gitee版本可追溯,看个人喜好。方案优点:风险低(图床失效)、除非阿里云OSS不维护了。图床以及云端(阿里云OSS)
解决github下载速度慢的问题(2020.08.07)正常情况下,不管是否有vpn,国内从github的下载速度从不会高于30kb/s,克隆小工程还好,有时会克隆大工程,那个过程,慢不说了,经常还会出现错误。经过一段时间的网络搜集、体验、分类,针对github下载速度慢的解决方法,主要有以下几种。(都是网友们的分享,挑选出比较好用的)。1.浏览器插件法(最简单的方法)在chrome网上应用商
ROS人机交互软件免费分享1、前言看过上一篇文章的朋友,应该都知道,这里写了一个ROS人机交互软件。对,分享了!!!分享了!!!这里给这个软件起个名字,“Robot One”,字面意思。关于Robot One具体功能可以看上一篇文章,当然,这一篇文章也有使用示例视频。2、使用条件系统:ubuntu 16.04、ubuntu 18.04 amd 64位X86系列。软件:安装对应版本的ROS,16.0
移动机器人自主回充技术理论与实践
我手写了个SLAM算法!点击蓝色按钮,设置星标,第一时间获得文章推送哦1、前言前一段时间看过我文章的都知道,我打算写一个SLAM源码阅读的文章,然后,我就去读了Gmapping的源码,感受良多,不足的地方就是源码太乱了,阅读起来真的不香。于是就有了这篇文章,在我仔细阅读之后,我在源码的结构基础之上,进行大刀阔斧的删减和更改之后得到一个易于阅读的建图算法功能包,极大的降低了代码量,极大的提升了阅读体
这是一个完整的包含机械模型、硬件电路、底层驱动、上层应用等的ROS2 兼容差速和阿克曼的开发平台。