




- @yt_42370304
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
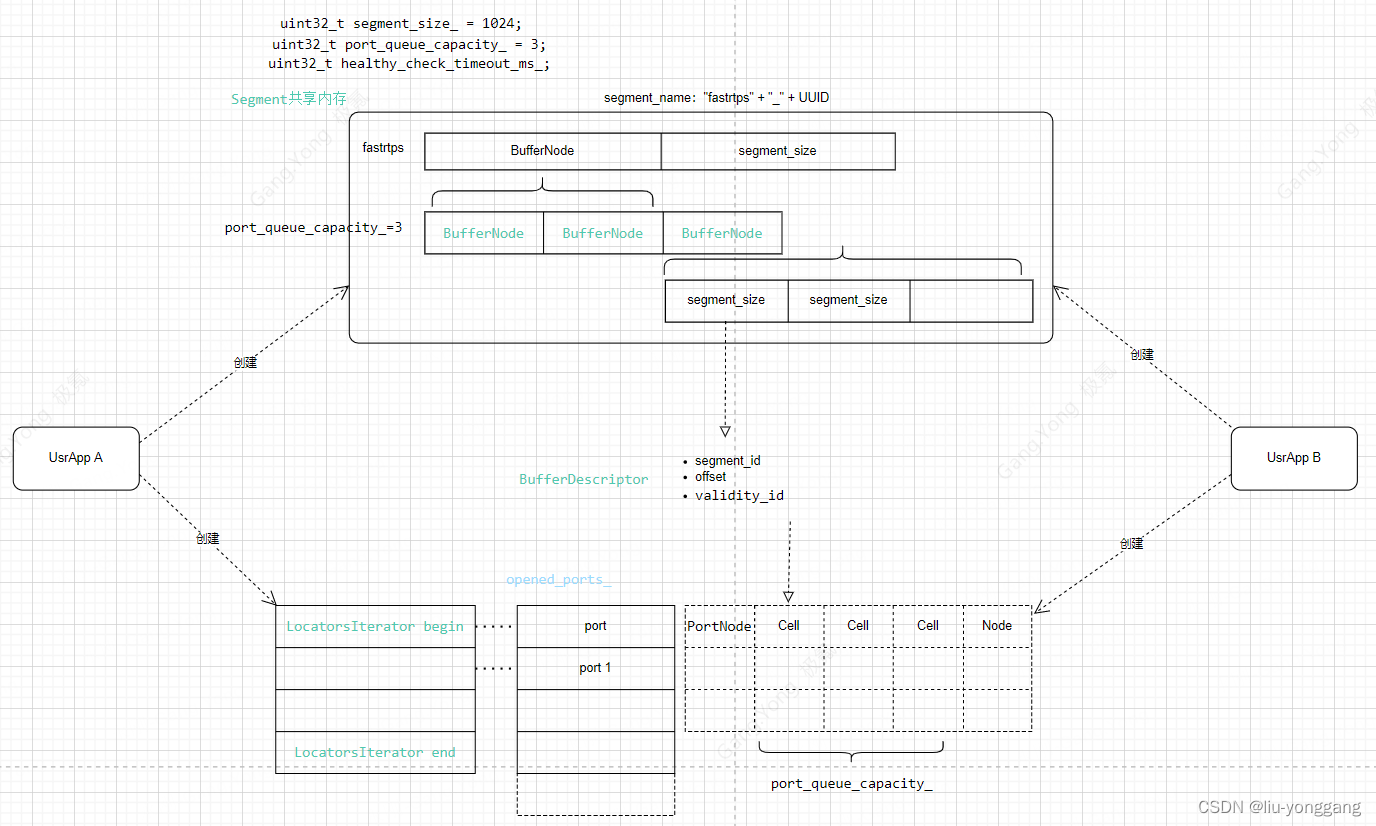
fastrtps_port+“port_id”:用于控制发送的数据,包含循环队列MultiProducerConsumerRingBuffer,队列中包含共享内存Node成员,共享内存Cell[port_queue_capacity_]数组。当发送数据时,首先在segment_size中申请内存(申请BufferNode用于保存申请offset、size、引用计数),拷贝到segment里,生成S
一、ros2 软件架构二、ros2 命令代码解析1.ros2 action 源码解析2.ros2 bag 源码解析3.ros2 run 源码解析4.ros2 launch 源码解析三、ros2 相关模块介绍fastrtsp 源码解析

RouDi是Routing and Discovery的缩写。RouDi负责通信设置,但实际上并不参与发布者与订阅者或客户端与服务器之间的通信。鲁迪可以被认为是iceoryx的总机操作员。它的另一个主要任务是设置共享内存,应用程序使用共享内存交换有效负载数据。RouDi有时被称为守护进程,它管理共享内存并负责服务发现,即使订阅者/客户端能够找到发布者/服务器提供的主题。它还跟踪所有已初始化运行时的

[Linux内核系列—C语言中内嵌汇编 asm volatile ]https://cn.aliyun.com/jiaocheng/68768.html[ linux源码阅读笔记 asm函数]https://www.cnblogs.com/elnino/p/4313340.htmlstatic inline char * strcpy(char * dest, const char *src)..
请参考rcsb官方提供文档接口由于python提供接口简单,所以选择了它程序流程1.从thefile.txt 文件中读取蛋白序列2.然后从rcsb 查询,获取查询XML数据3.解析XML文件4.下载pdb文件python代码可以用python name.py 直接运行.#!/usr/bin/python# -*- coding: UTF-8 -*-impor...
本文主要说介绍ADAPTIVE PLATFORM(自适应平台)一、AUTOSAR:Automotive Open System Architecture(汽车开放系统架构)AUTOSAR分几大块:CLASSIC PLATFORM(经典平台)ADAPTIVE PLATFORM(自适应平台)FOUNDATION(基础平台)ACCEPTANCE TESTS FOR CLASSIC PLATFORM (经
背景最近在调研Android P中 AMS,WMS,通讯逻辑,记录整理一下。SystemServer 文件目录AOSP\frameworks\base\services\java\com\android\server\SystemServer.javaAOSP\frameworks\base\services\core\java\com\android\server\SystemServiceMa