- @yknocrwdJTk
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
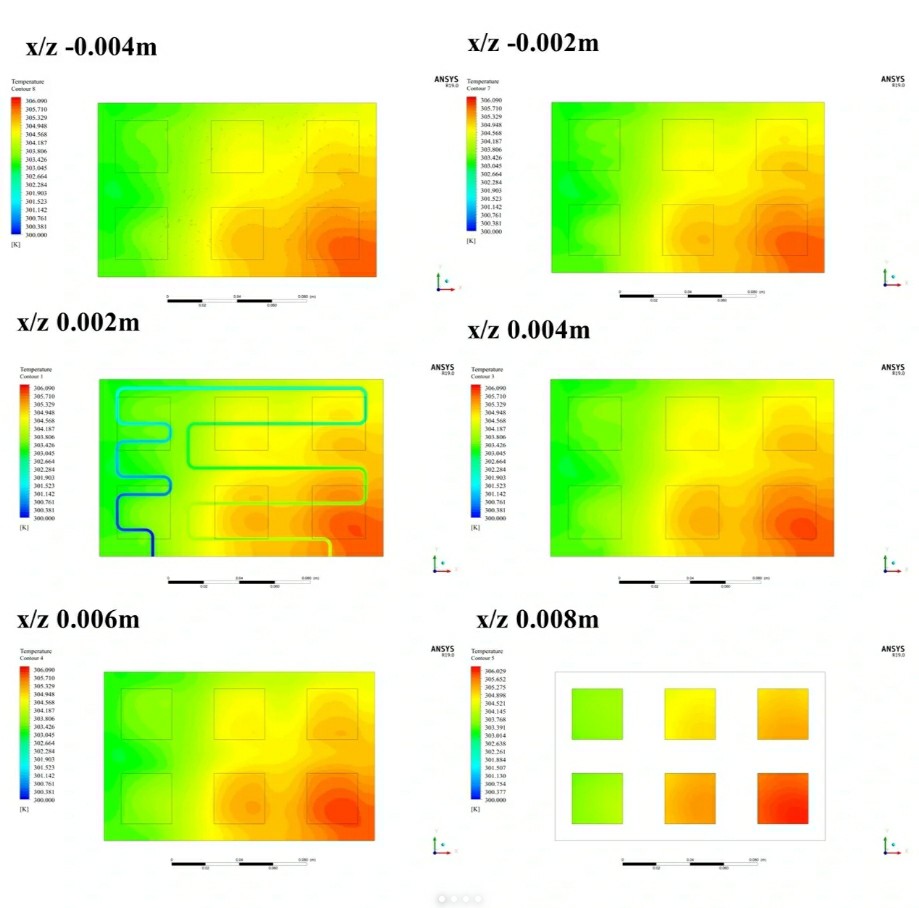
fluent芯片水冷散热的模拟散热片上的冷凝水珠沿着铝制表面慢慢滑落,实验室的示波器曲线突然开始剧烈抖动——这个场景让工程师老张意识到,他那台价值百万的服务器又双叒叕过热了。如今芯片热流密度突破100W/cm²早已不是新闻,传统风冷就像用蒲扇给火山降温,水冷技术正在从实验室走向量产。今天我们手把手玩转Fluent水冷仿真,用数值模拟代替昂贵的试错成本。
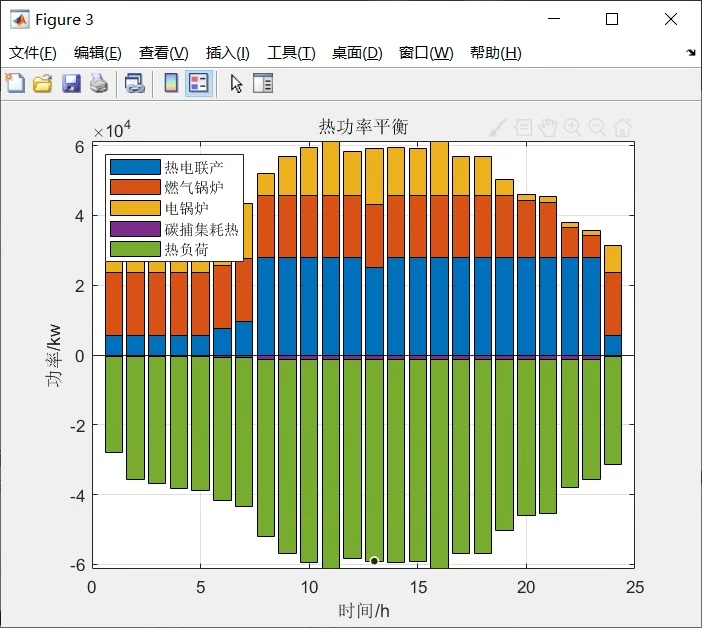
主要目标是最小化能源系统的总运行成本,包括购电成本、购气成本、碳成本以及设备的运维成本。购电成本取决于购电量和电价,购气成本取决于购气量和气价,碳成本与碳排放和碳价有关,设备的运维成本则与设备的运行时间和维护费用有关。# 假设购电成本为购电量乘以电价# 假设购气成本为购气量乘以气价# 假设碳成本为碳排放量乘以碳价# 假设设备运维成本为固定值# 计算总运行成本代码分析:分别计算购电成本、购气成本、碳
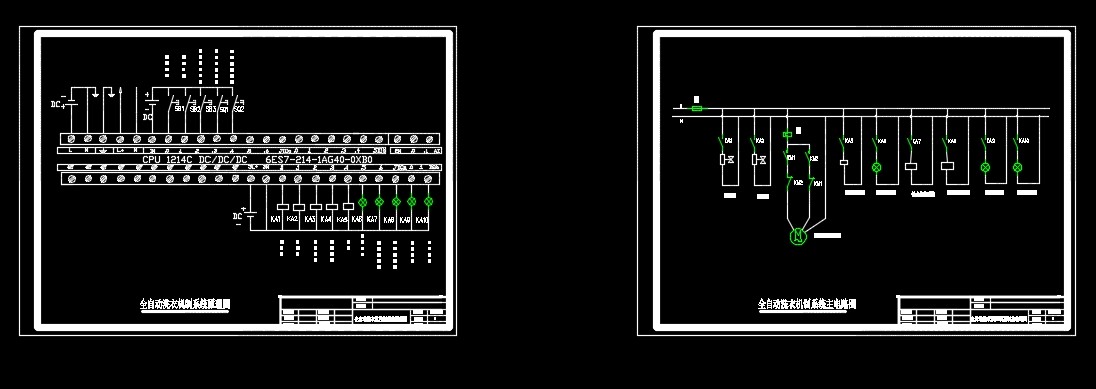
基于plc的全自动洗衣机控制设计采用博途1200仿真,提供程序,设计报告,接线图。实现要求(详见上方演示视频):PLC投入运行,系统处于初始状态,准备好启动。启动时开始进水,水满(即水位到达高水位)时停止进水并开始正洗涤。正转洗涤15s后暂停,暂停3s后开始反转洗涤。反转洗涤15s后暂停,暂停3s后若正、反洗涤未满3次,则返回从正转洗涤开始的动作;若正、反洗涤满3次时,则开始排水。排水水位若下降到
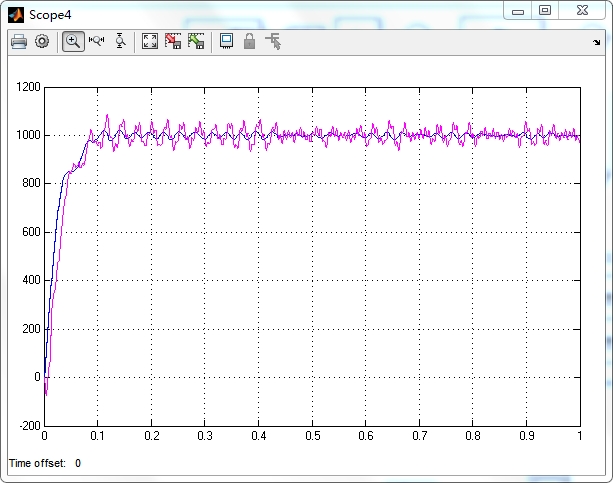
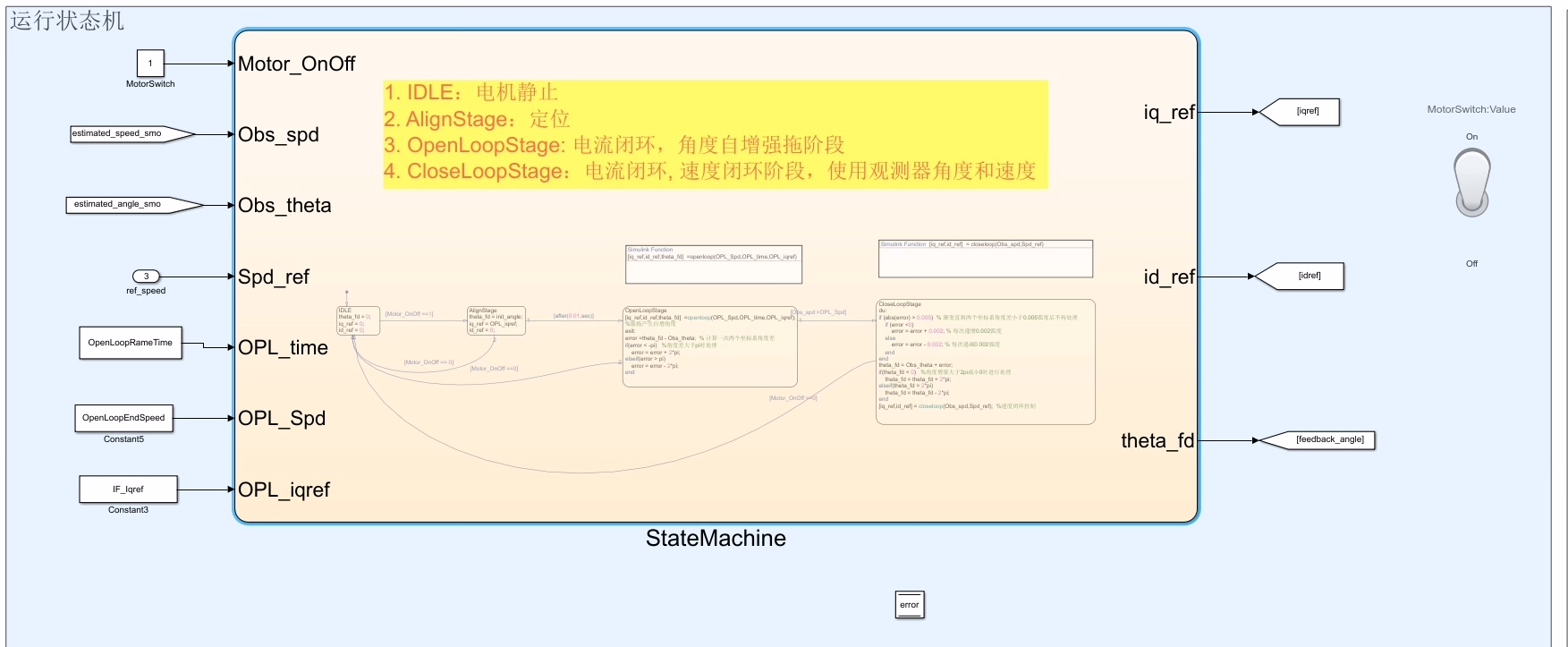
永磁同步电机(PMSM)基于高阶滑模观测器(HSMO)的无位置传感器速度控制仿真。在电机控制领域,永磁同步电机(PMSM)因其高效、高功率密度等优点,广泛应用于工业生产、电动汽车等众多场景。而无位置传感器技术,更是为PMSM的应用增添了一抹亮色,它去除了昂贵且易损坏的位置传感器,降低成本的同时提高了系统可靠性。其中,基于高阶滑模观测器(HSMO)的无位置传感器速度控制方法,凭借其对系统不确定性和外
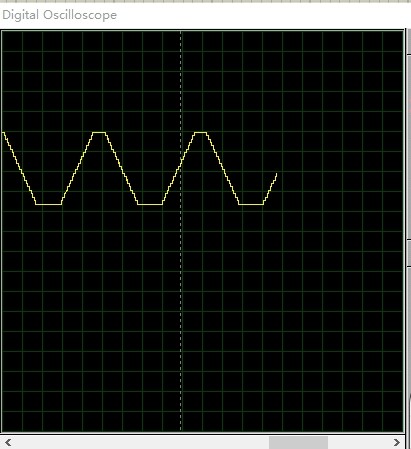
咱们用STC89C52这块经典51单片机当大脑,配合DAC0832做数模转换,直接上Proteus搭了个能摸得着的虚拟实验室。别看这玩意儿体积小,能折腾的花样可不少——六种波形一键切换,频率、占空比、幅度全都能调,连数码管都会跟着蹦数字。最后上电测试,方波上升沿约1.2us,正弦波THD控制在5%以内,拿虚拟示波器量出来的指标基本达标。比如频率步进设置时,短按切步长,长按直接跳转的设计,完全靠定时
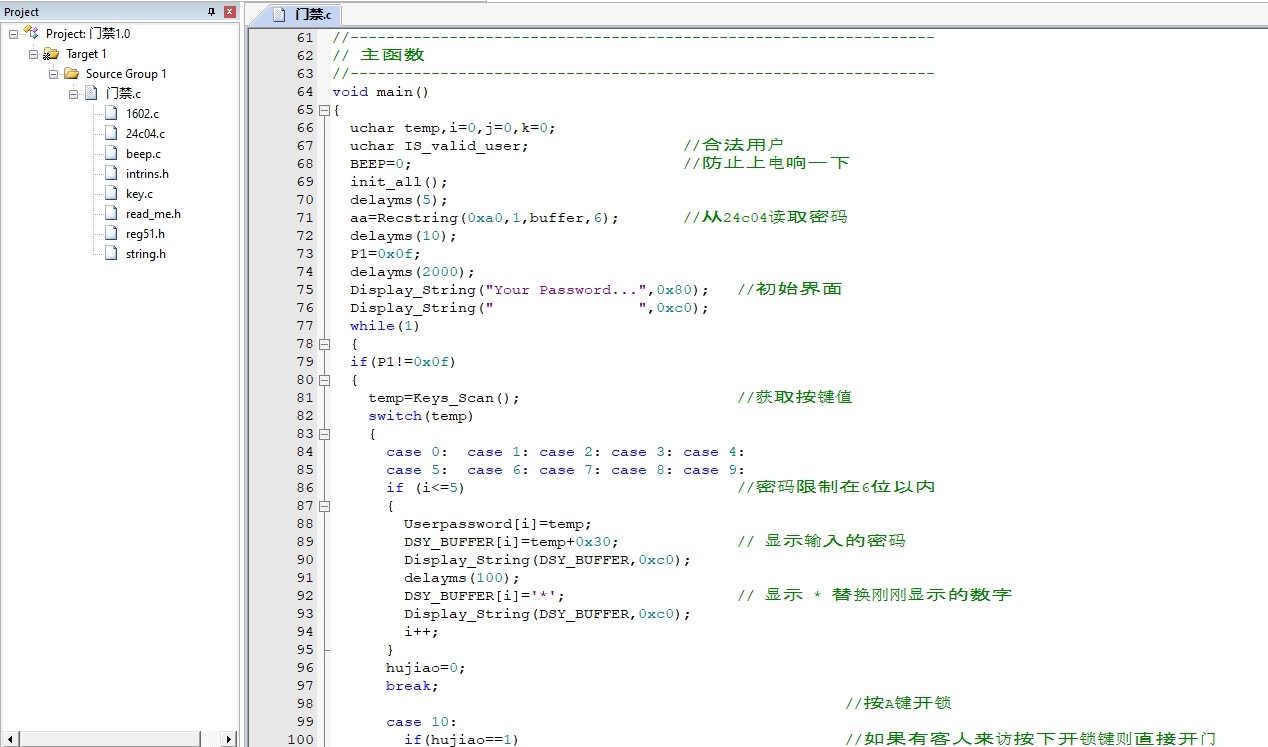
通过这次设计,我们实现了一个简单的基于51单片机的密码锁/门禁系统。虽然功能简单,但整个设计过程涉及到了硬件连接、软件编写、仿真测试等多个方面,是一个非常不错的学习项目。支持密码修改功能。增加指纹识别功能。增加动态密码功能。希望这篇博文对你有所帮助,也欢迎在评论区留言交流!
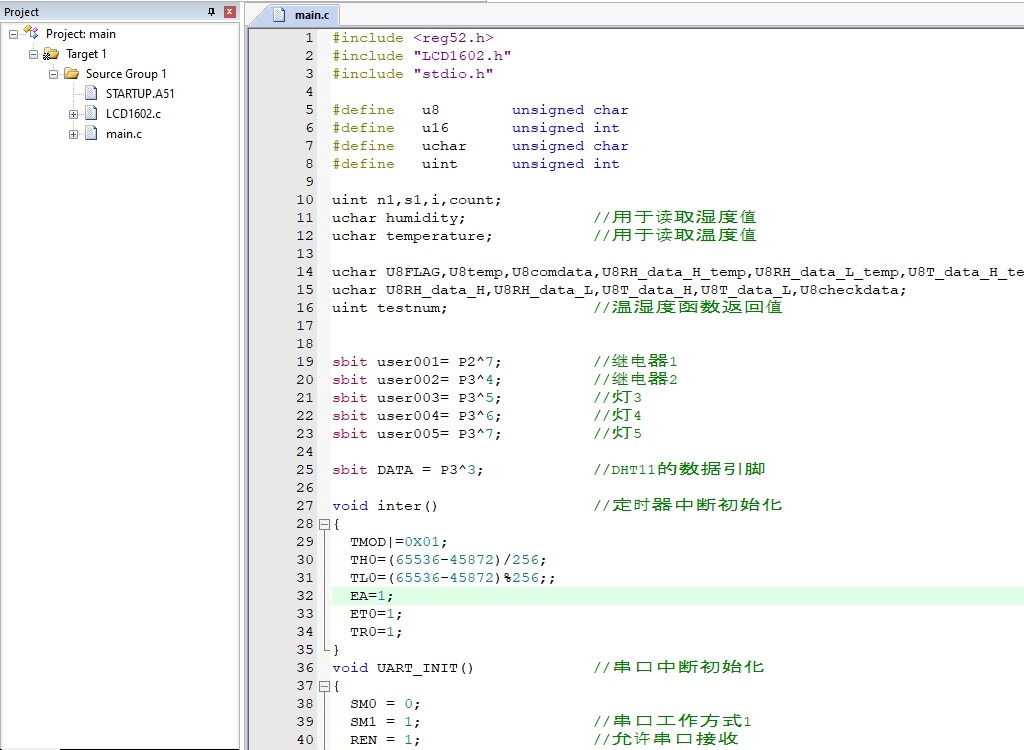
继电器控制比较讲究,P1口的低五位分别控制五个设备,每个口都加了9012三极管做电流放大。比如发送"2"后收到"Device2:ON"这样的反馈,配合串口助手的自动发送功能,能玩出远程控制流水灯的效果。DHT11的数据读取是个技术活,这货的时序要求严得很。PS:通过串口助手发送命令12345,分别控制5个设备的开和关。PS:通过串口助手发送命令12345,分别控制5个设备的开和关。发送“1”控制继
支持485和232串口通信,该从机源码支持51系列和STC12系列单片机,支持功能码01,02,03,04,05,06,15,16等常用功能码...买该源码赠送威纶通,信捷,昆仑通泰三个触摸屏的测试工程文件,界面看图片。支持485和232串口通信,该从机源码支持51系列和STC12系列单片机,支持功能码01,02,03,04,05,06,15,16等常用功能码...买该源码赠送威纶通,信捷,昆仑通

这个模型最大的价值不是跑通仿真,而是拿着它去怼真实电机时,能精确锁定问题层——到底是观测器抽风还是PI参数拉胯,波形对比一目了然。这招让表贴式电机和内嵌式电机参数能混着用,改电机类型就像换皮肤,算法内核纹丝不动。这是一种常用的无传感FOC电机控制算法,掌握这种算法的基本原理,并有仿真模型在手,就可以用它来指导实践中的程序调试,做到实际项目不盲目调试。这是一种常用的无传感FOC电机控制算法,掌握这种
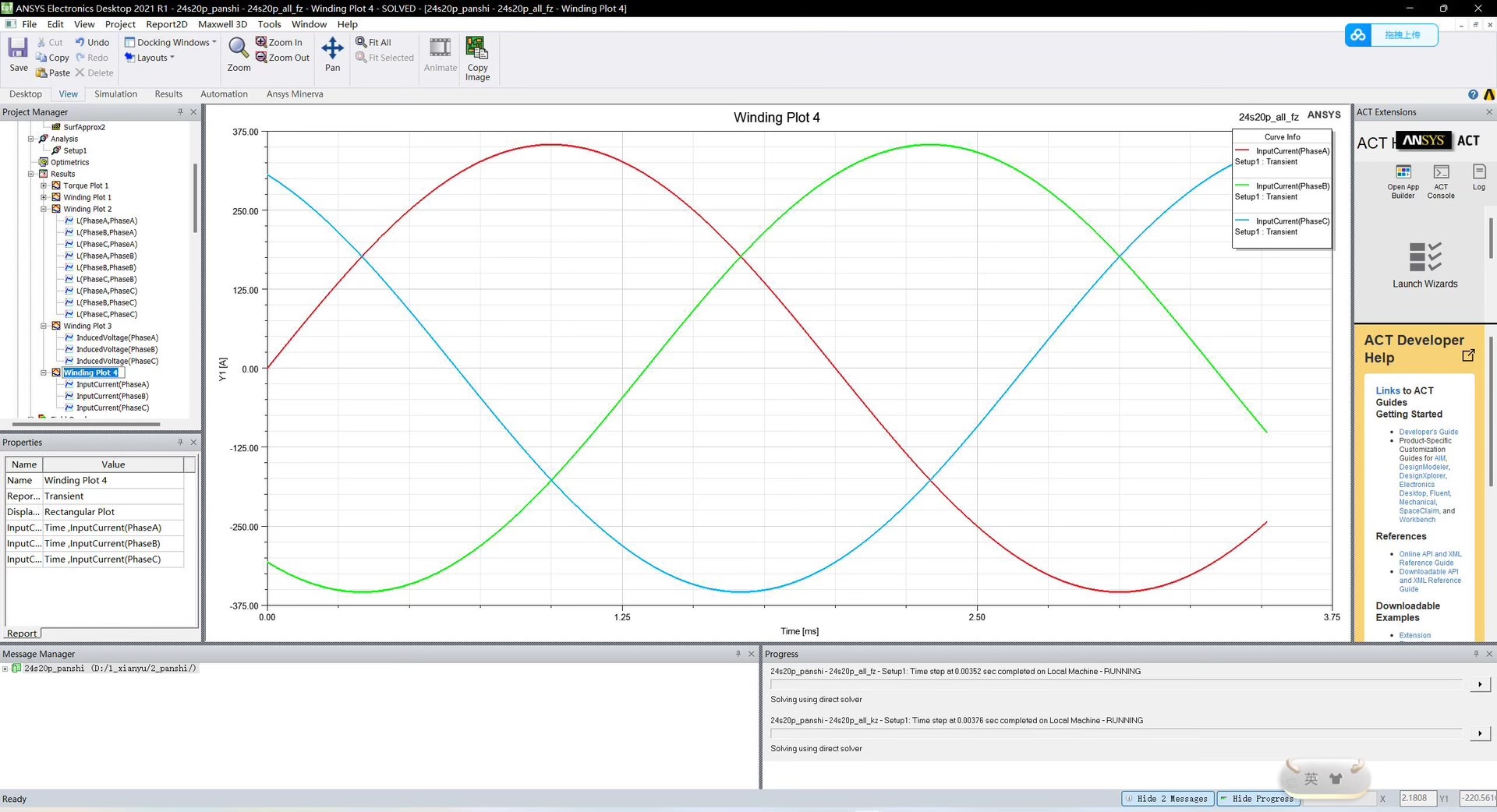
本文档所分析的代码是基于Ansys Maxwell 2022R1版本开发的盘式电机电磁仿真参数化模型,采用双定单转结构与Halbach磁钢排列,核心槽极配合为24槽20极,同时支持18槽12极、18s16p等多种槽极组合扩展。模型具备全参数化特性,电机内外径、叠厚、气隙、槽型尺寸、磁钢参数等关键指标均可灵活调整,适用于盘式电机电磁性能的精准仿真与优化设计,广泛应用于新能源汽车驱动、工业传动、特种电