- @yingzhefengyuzou
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
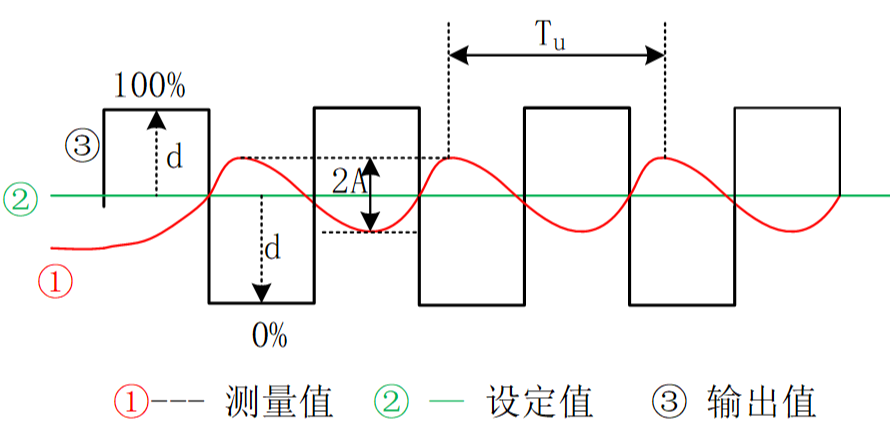
PID继电器自整定
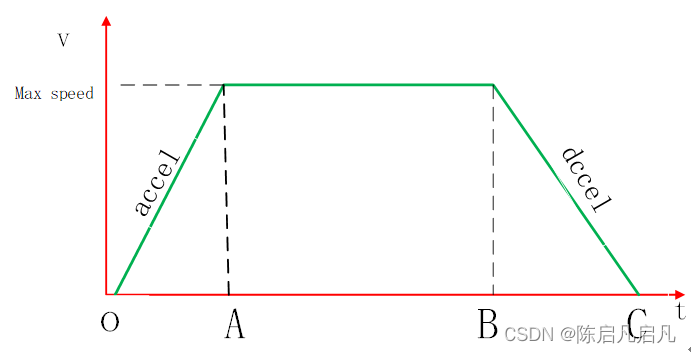
梯形加减速一共分为三个阶段,OA 加速部分、AB 匀速部分 和 BC 减速部分。 在 OA 加速过程中,由低于步进电机的启动频率开始启动(模型中由 0 启动),以固定的加速度增加速度到目标值;在 AB 匀速过程中,以最大速度匀速运动; 在 BC 减速部分中,以加速度不变的速度递减到 0; 这种算法是一种在加速过程和减速过程中加速度不变的匀变速控制算法,由于速度变化的曲线有折点,所以在启动、停止、匀
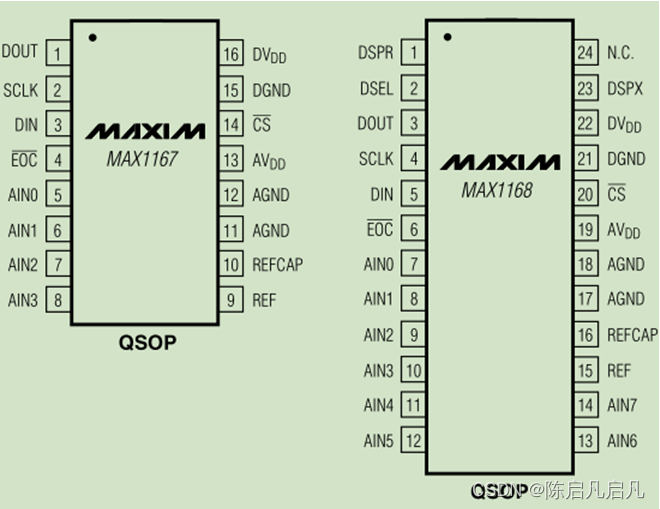
MAX1167/MAX1168为低功耗、多通道、16位逐次逼近型模数转换器(ADC),具有集成的+4.096V基准电压、1个基准电压缓冲器、一个内部振荡器和自动关断等特点,并带有一个高速SPI™/QSPI™/兼容MICROWIRE™的接口。MAX1167/MAX1168采用单+5V模拟电源工作,且具有独立的数字电源,允许直接与+2.7V至+5.5V的数字逻辑接口。
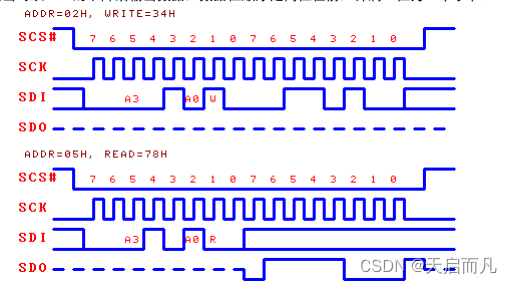
CH432芯片是一款扩展串口芯片,当你的MCU所带的串口不足时,可以通过此芯片来扩展出两个串口出来。此芯片支持支持半双工收发自动切换、带自动硬件速率控制的高速串口、红外编解码、RS485、IrDA等等许多功能,本文只阐述简单串口功能的实现逻辑。此芯片和MCU的通信方式包括8位并口和SPI方式,本文只阐述SPI方式的通信。CH432手册将各种功能糅杂在一起,阅读非常费劲,本文来梳理一下通过SPI串口
CH432芯片是一款扩展串口芯片,当你的MCU所带的串口不足时,可以通过此芯片来扩展出两个串口出来。此芯片支持支持半双工收发自动切换、带自动硬件速率控制的高速串口、红外编解码、RS485、IrDA等等许多功能,本文只阐述简单串口功能的实现逻辑。此芯片和MCU的通信方式包括8位并口和SPI方式,本文只阐述SPI方式的通信。CH432手册将各种功能糅杂在一起,阅读非常费劲,本文来梳理一下通过SPI串口
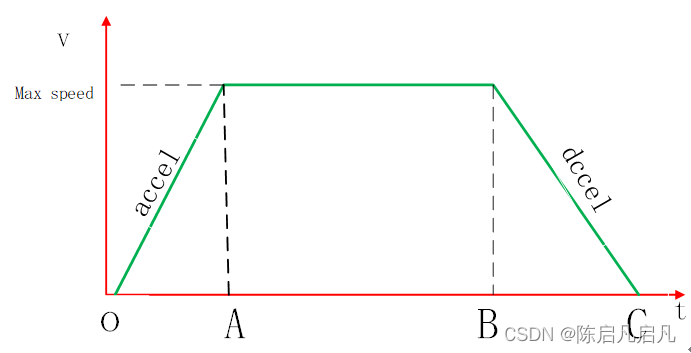
梯形加减速一共分为三个阶段,OA 加速部分、AB 匀速部分 和 BC 减速部分。 在 OA 加速过程中,由低于步进电机的启动频率开始启动(模型中由 0 启动),以固定的加速度增加速度到目标值;在 AB 匀速过程中,以最大速度匀速运动; 在 BC 减速部分中,以加速度不变的速度递减到 0; 这种算法是一种在加速过程和减速过程中加速度不变的匀变速控制算法,由于速度变化的曲线有折点,所以在启动、停止、匀
梯形加减速一共分为三个阶段,OA 加速部分、AB 匀速部分 和 BC 减速部分。 在 OA 加速过程中,由低于步进电机的启动频率开始启动(模型中由 0 启动),以固定的加速度增加速度到目标值;在 AB 匀速过程中,以最大速度匀速运动; 在 BC 减速部分中,以加速度不变的速度递减到 0; 这种算法是一种在加速过程和减速过程中加速度不变的匀变速控制算法,由于速度变化的曲线有折点,所以在启动、停止、匀