




- @yechen1
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
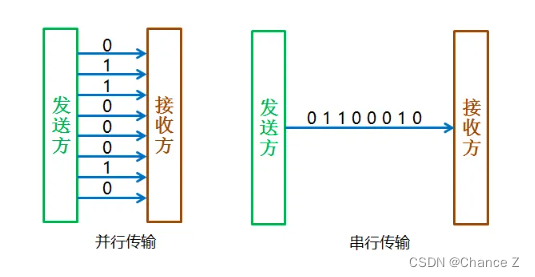
嵌入式之总线协议:1、UART
机械臂(moveit)
视觉抓取第一章设计方案以及设备选型文章目录视觉抓取前言一、方案设计二、使用步骤1.引入库2.读入数据总结前言本项目旨在设计一款基于机器视觉的分拣机器人。涉及的方向包括:1.识别功能:能提取零件的特征,对零件进行识别。2.定位功能:通过相机标定以及相应的算法实现零件坐标的定位。3.搬运功能:通过机械臂的坐标变换、运动学的正逆运算求解 以及手眼坐标变换实现机械臂对零件进行抓取。4.轨迹控制:通过传感器
Anaconda软件_Python环境搭建教程Python环境搭建教程Anaconda软件_Python环境搭建教程前言1.引入库1、Anaconda软件系统2、Conda常用的命令:3、创建Python虚拟环境4、激活/关闭虚拟环境5、安装Python的包前言Python环境的搭建是基于Anaconda软件来搭建的,Anaconda包括Conda、Python、Pip以及一大堆安装好的工具包。首
GANSS 高斯 ALT71 使用说明GANSS 高斯 ALT71 使用说明1、蓝牙连接:2、Ubuntu下数字小键盘开启/关闭:3、ubuntu和windows系统中都会存在:GANSS 高斯 ALT71 使用说明1、蓝牙连接:开关拨OFF 装电池 拨到ON,指示灯会闪烁一下然后FN按住,再按一下Q,接着空格右边FN按住,再按住P,长按,第一个设备打开蓝牙添加搜索,链接 可以正常输入,...
root@sz-H81U:/home/sz# docker imagesREPOSITORYTAGIMAGE IDCREATEDSIZEros-hilens1latest16276558a9e12 hours ago...
Docker 本地导入镜像,保存镜像,载入镜像,删除镜像1、Docker导入本地镜像有时候我们自己在本地或者其它小伙伴电脑上拷贝了一份镜像,有了这个镜像之后,我们可以把本地的镜像导入,使用docker import 命令。例如这里下载了一个 alibaba-rocketmq-3.2.6.tar.gz 镜像文件,使用下列命令导入:[root@rocketmq-nameserver4 dev]...
OpenEuler Developer Day 2022文章目录前言一、中信二、上交所三、圆桌会议huawei![在这里插入图片描述](https://img-blog.csdnimg.cn/a271873ae63b40c7acc1adda9f701ac2.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1