




- @yRXTIugk
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
当然不是,你得根据实际设备协议改数据解析部分。比如设备返回的数据可能是十六进制,那就要用来转。分层架构:解耦UI和业务逻辑,换硬件不用改Form异常处理try-catch和状态检查,程序不容易崩界面美化:用第三方库+合理布局,至少不像“计算器界面”了如果有同学想扩展,比如加个数据存到Excel的功能,直接写个类,继承接口,在MainForm里调用就行,扩展性拉满~上位机C#机框架源码,详细清晰可见
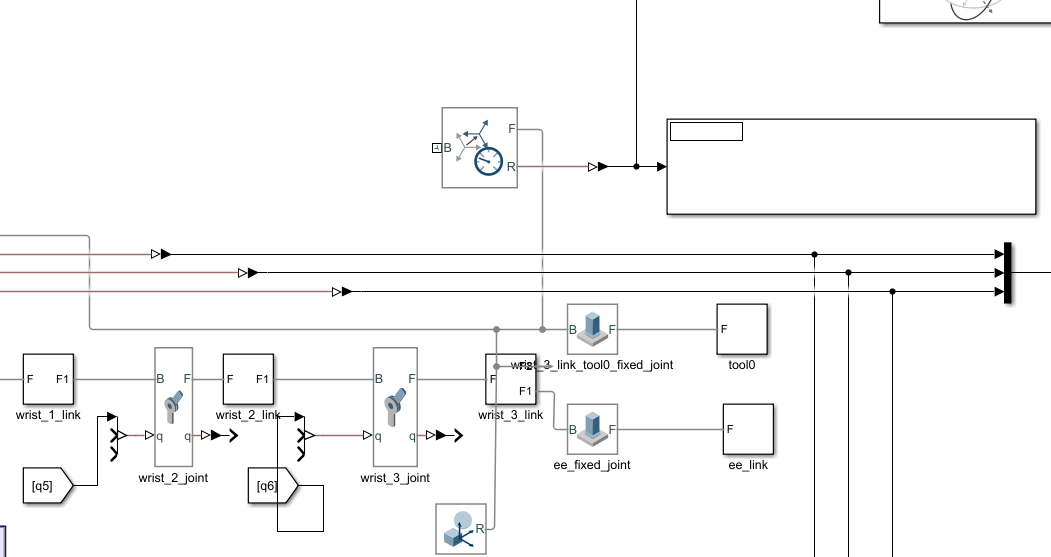
MATLAB仿真UR5机器人simulink simscape 自制建模正向运动学,逆向运动学关节空间轨迹规划 五次多项式轨迹规划笛卡尔空间轨迹规划 直线插补还包含机器人工具箱建立的模型对比在机器人研究领域,MATLAB是一款极为强大的工具,它提供了丰富的函数库和仿真环境,能让我们对机器人的运动学和轨迹规划进行深入的研究与分析。
从这些代码中,我们可以看到理论与实践的完美结合。NExT算法的两个变体,时间法和频率法,各自都有其适用的场景与优势。而通过算法的优化与凝练,如NExTCONDENSED的实现,我们能够在保持高精度的同时大幅提升计算效率。对于从事机械振动分析的工程师与研究者来说,理解和掌握这些算法的本质,不仅仅是为了完成一项任务,更是为了在这个充满挑战的领域中不断突破自我。每一个代码行背后,都凝聚着前人的智慧与心血

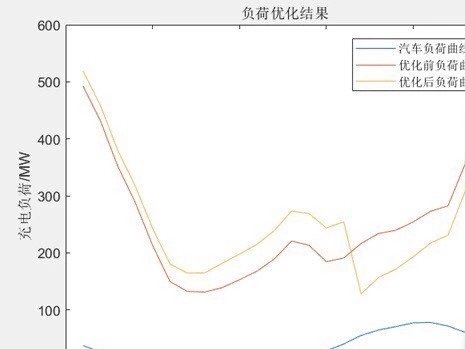
分析用户响应度对电动汽车有序充电的影响,建立峰谷分时电价对电动汽车负荷影响 的模型,在模拟出电动汽车无序充电负荷的基础上,用实际案例对模型进行验证,利用多目标优化遗传算法进行求解,验证峰谷分时电价对电网负荷优化的有效性。分析用户响应度对电动汽车有序充电的影响,建立峰谷分时电价对电动汽车负荷影响 的模型,在模拟出电动汽车无序充电负荷的基础上,用实际案例对模型进行验证,利用多目标优化遗传算法进行求解,
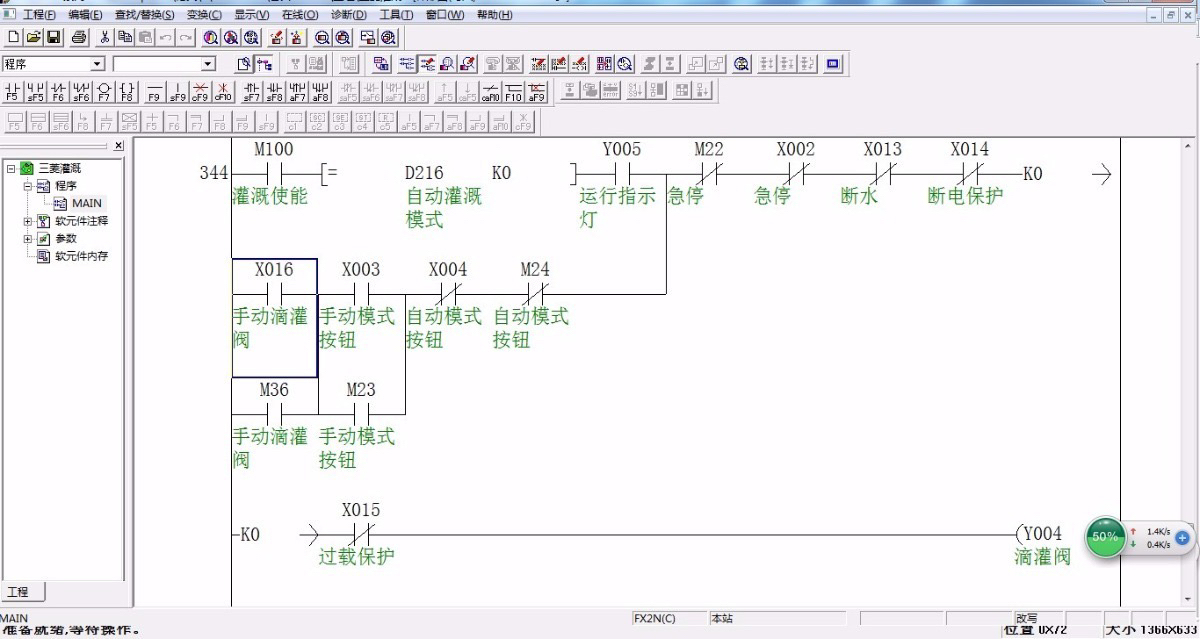
基于三菱PLC和MCGS组态农田智能灌溉系统带解释的梯形图接线图原理图图纸,io分配,组态画面凌晨三点被警报声吵醒,发现灌溉系统又抽风了。抄起工具箱冲进控制室,PLC的ERROR灯正疯狂闪烁——这已经是本月第三次因为湿度传感器误报导致水泵过载。那一刻我下定决心,要搞个靠谱的智能灌溉方案。
重写与,维护_visuals列表管理视觉元素;提供AddVisual方法,支持添加/移除绘图视觉对象,排除Shape类型元素(避免与绘图对象冲突)。
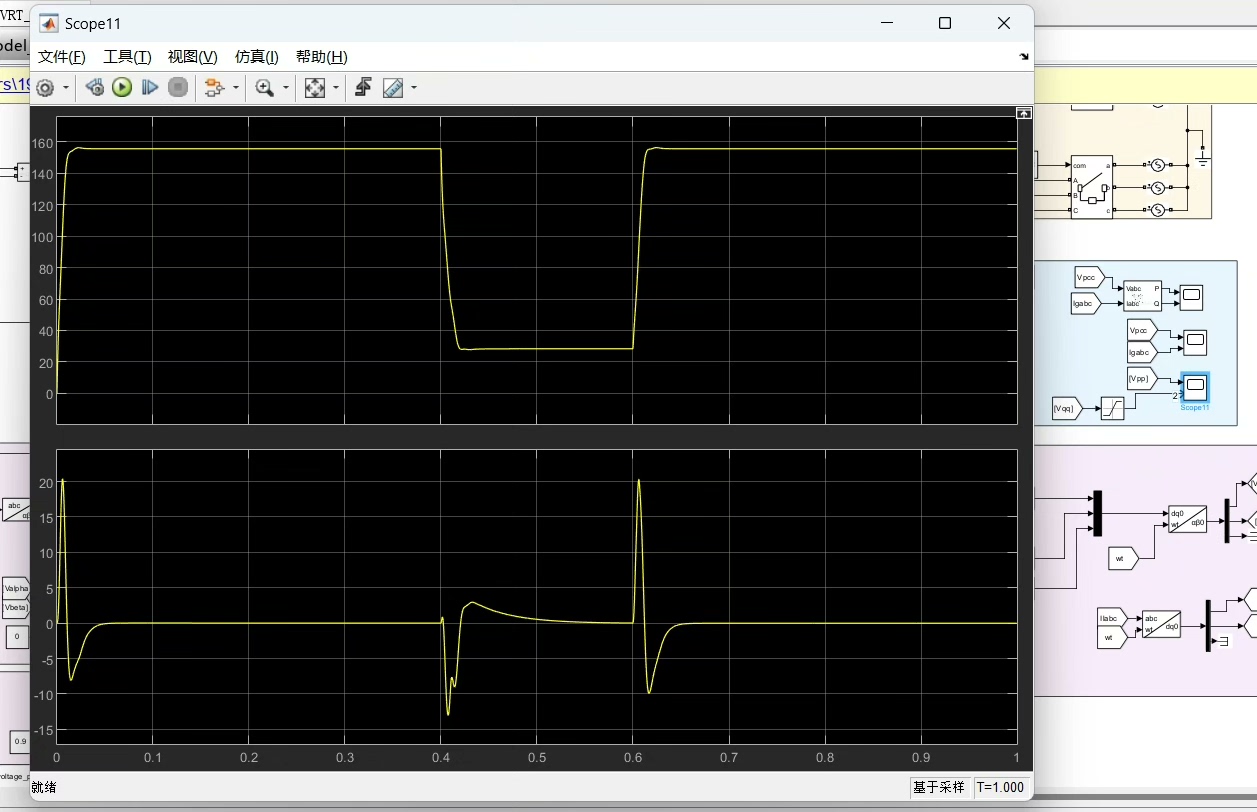
整个系统在RT-LAB上做硬件在环测试时,电网电压突然跌落到0.2pu的瞬间,直流母线电压就像被无形的手稳稳托住,最高仅冲到1.15倍额定值。在传统两极式三相光伏并网逆变器低电压穿越控制策略的基础上,对光伏侧MPPT算法进行改进,在网侧进行PCC点电网电压全前馈,有效地避免了电网故障导致母线电压过压和网侧电流过流。在传统两极式三相光伏并网逆变器低电压穿越控制策略的基础上,对光伏侧MPPT算法进行改
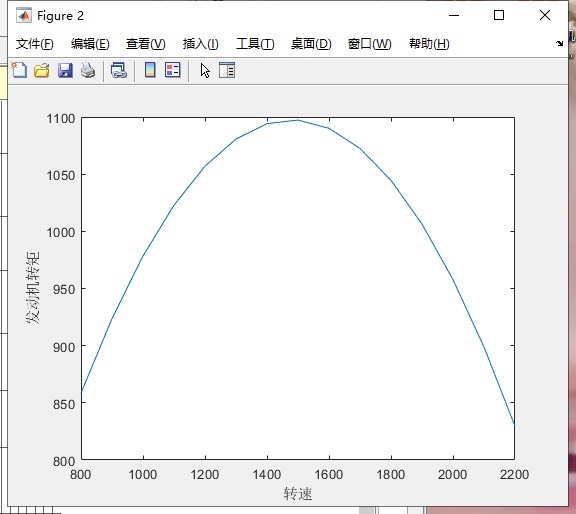
整个模型最嘚瑟的设计是信号监测系统——在任何子系统的右键菜单里点"Show Signal Flow",会自动生成该模块的传递函数框图。比如遇到仿真发散的情况,优先检查传动轴刚度是不是设成负数了(别笑,真有人这么干过),或者差速器锁止系数超过1了。最近在搞一个传动系统的仿真项目,整了个10自由度的模型,从发动机曲轴到轮边减速器全给包圆了。10自由度传动系统模型,包涵解释文档,simulink模型,理
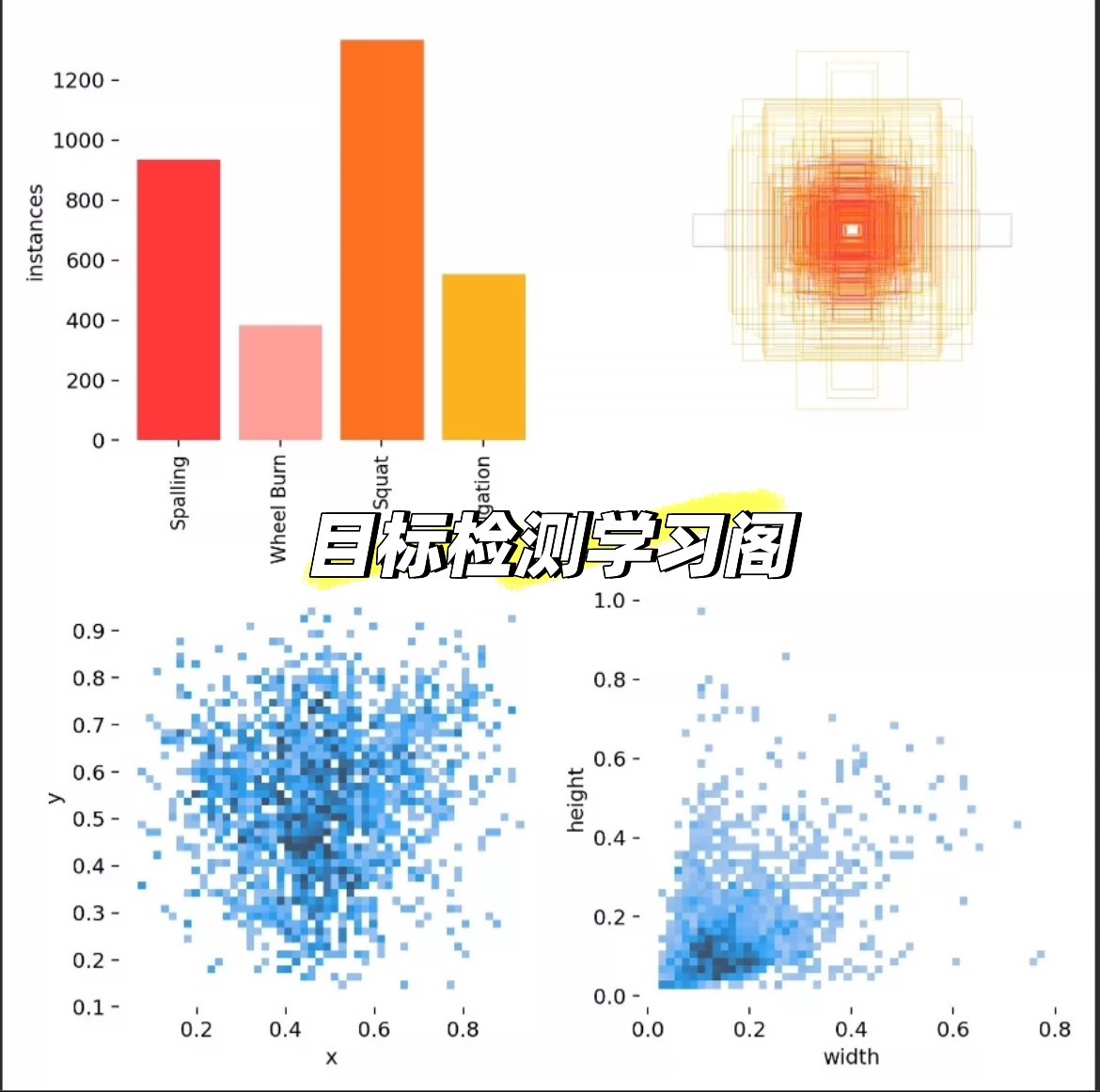
本文介绍了一种基于Yolov8的铁轨轨道缺陷检测方法,通过对已提供的数据集进行训练和测试,我们可以准确地检测出脱落、轮烧、压陷和磨耗等轨道缺陷。本文将介绍一种基于Yolov8的铁轨轨道缺陷检测方法,该方法利用已提供的数据集进行模型训练,并针对脱落(Spalling)、轮烧(Wheel Burn)、压陷(Squat)和磨耗(Corrugation)等轨道缺陷进行检测。本次研究使用的数据集包含共227
这种设计在1200上跑得流畅,但1500反而会因为架构差异出现梯度异常——别问我是怎么知道的,说多了都是泪。这里有个坑要注意:1500系列的缓存池比1200大了一倍。实战中如果拿1200的配置直接套1500,虽然能跑但性能就浪费了,反过来用又会爆内存。但注意看设备标签,必须是1200系列的新版固件(V3.2+)。单部六层(1200系列、1500系列都有可仿真 ),六部十层1200系列。单部六层(1
