- @xuqw11111
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
一本通 广度优先搜索 信息奥赛
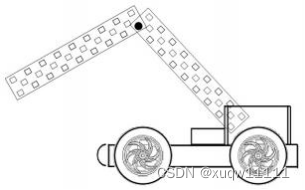
螺丝连接的坚固性坚固性是机器人能顺利完成指定任务的一个重要条件,无论我们程序设计的如何完美,如果不能保证机器人具有坚固性和稳定性,就无法保证任务的顺利完成,机器人在运行时如果发生散架和分裂都会影响其功能的实现,而这种现象的发生其根本原因是各个部件之间的组合存在缺陷。例:一个机器人需要够到离地面很高的目标物体。有时太高以至一个机器臂不能够到它。这时,就需要两个部件连接起来达到需求高度。如图所示:如果
前进后退一致性好,但是转弯的摩擦力较大,不宜精确控制,适合较重物品的搬运和较小角度的调整,全向轮四电机底盘前后一致性还可以,转向摩擦力小,但是在左右倾斜的路面上容易产生侧滑。方式3:两电机 前后同步的四驱(可以使用链条同步或者齿轮同步,安装较麻烦,但运动一致性较好,阻力调节很关键) 在vex机器人的比赛中较常用。方式1:驱动轮在后,万向轮在前(支撑轮也可以换成全向轮,目的只是撑地),在一般的巡线比
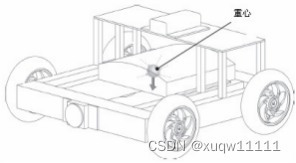
总之,在可以完成任务的同时尽可能降低重心的高度是很有优势的,降低重心的方法可。机器人的重心,这样在机器人倾斜的时候,重心的下投影点依然在多边形的正上方。过某个平面时,机器人会发生倾倒 (注意保护机器人不会损坏),机器人的重心,,这就可以考虑第二种方法,在底部增加配重,从而降低机器人整体的重心位置。果机器人的任务是拾取一个重的物体,这个物体的加入会使得机器人的重心发生变。,机器人设计要达到比赛要求的
齿轮的最重要属性就是它的齿数。齿轮是根据齿数分类的。齿轮通常不会单独使用,齿 轮的基本属性就是可以将运动从一根轴传到其它轴上。利用齿轮改变转速利用齿轮改变转动方向将旋转运动改变为直线运动带自锁的涡轮蜗杆传动齿轮可以用来传递力、增加或者减缓速度,以及改变转动的方向。如果用大齿轮带动小齿轮, 称为“加速”,因为小齿轮的转动速度会比大齿轮快。反之,当一个小齿轮带动一个 大齿轮,称为“减速”。如上图所示,