
写文章




- @xunmizhengzha
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
想买个深度学习的算力设备,TOPs和TFLOPs 啥啥分不清
双精度理论峰值 = FP64 Cores * GPU Boost Clock * 2 = 1792 *1.48GHz*2 = 5.3 TFlops。TOPS(Tera Operations Per Second:)1TOPS处理器每秒钟可进行一万亿次(10^12)操作。GOPS(Giga Operations Per Second):1GOPS处理器每秒钟可进行一亿次(10^9)操作。TFLOPs

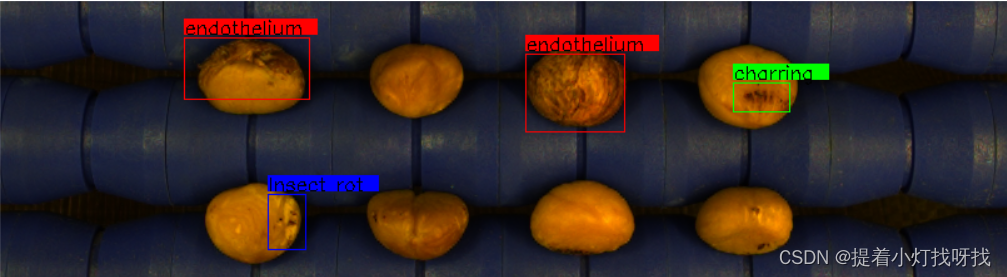
目标检测后的图像上绘制边界框和标签
效果如图所示,有个遗憾就是CV2在图像上显示中文有点难,也不想用别的了,所以改成了英文,代码在下面了,一定要注意一点,就是标注文件的读取一定要根据自己的实际情况改一下,我的所有图像的标注文件是一个XML文件。
目标检测后的图像上绘制边界框和标签
效果如图所示,有个遗憾就是CV2在图像上显示中文有点难,也不想用别的了,所以改成了英文,代码在下面了,一定要注意一点,就是标注文件的读取一定要根据自己的实际情况改一下,我的所有图像的标注文件是一个XML文件。
3D相机的种类
3D传感器有几种?双目相机,双目结构光相机,单目结构光相机,TOF相机,激光轮廓仪,激光振镜相机,机械激光雷达,半固态激光雷达,固态激光雷达,TOF激光雷达。他们的名字多种多样,互相交叉、上下包含。众多的传感器大致可分为两种,一种是激光雷达,另外一种就是本文要介绍的深度相机。

到底了