




- @xiaoxilang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
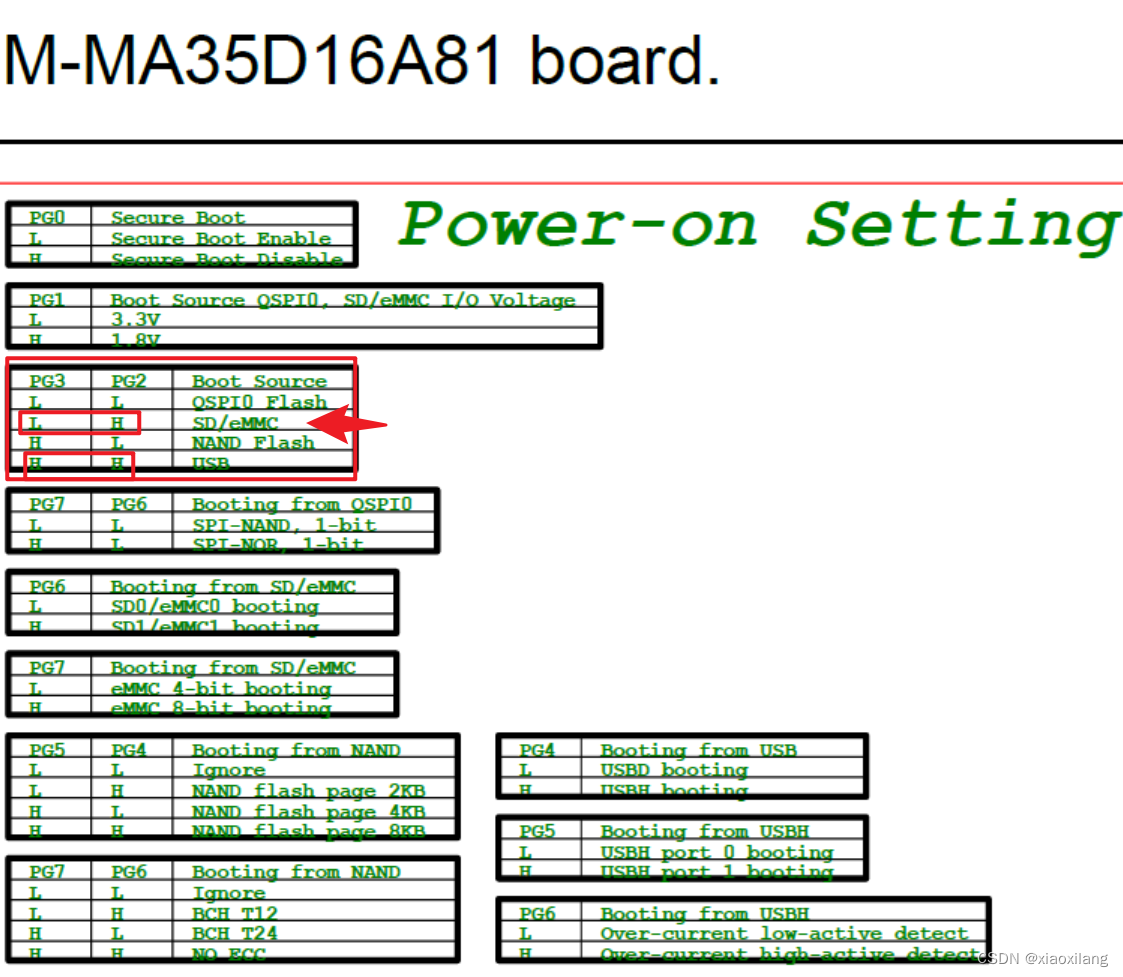
MA35D1开发和验证测试
传智播客黑马2018年python基础班+就业班人工智能深度学习机器学习全套培训教程链接:https://pan.baidu.com/s/1xqw4M_QjvR9OiYYZXdK93g 密码:1fhu
Linux开发面试题手机,主要是Linux服务器开发相关,此处仅作优秀试题摘录,详细文档,可自行到文档csdn下载区下载,同时,如涉及侵权内容,请及时告知,资源将被移除;2020年滴滴精选50面试题及答案.pdf2020年华为精选50面试题及答案.pdf2020年京东精选50面试题及答案.pdf2020年美团精选50面试题及答案.pdf2020年头条精选50面试题及答案.pdf2020年中兴精选5
Freertos是一个国外推出的一个迷你的实时操作系统内核,开源,功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等,可基本满足较小系统的需要。 RT-Thread是中国人自己推出的一个集实时操作系统(RTOS)内核、中间件组件和开发者社区于一体的技术平台,开源os,RT-Thread除了有常规RTOS的功能,还具备一个IoT OS平台所需的所有关键组件,例如G
IMU-1.模拟型的IMU 2.数字型的IMU======================= -----------传感器的数据积累部分已经完成,接下来开始应用---------------=========================================================================...
文档参考:上海丙寅电子有限公司 技术文档导语:磁力计传感器取自于大地磁感应的强度hx,hy,hz;1如何得到罗盘的方位角:怎么才能够从简单的 3 轴数据得到罗盘的方位角 1)当 3 轴磁力计工作时可以读到 XYZ 三轴的磁场强度hx,hy,hz,此时的数值并不能直接用作方位角的计算! 因为此时的读数可能受到器件版面上其他一些含磁材料的影响,形成圆心坐标的硬铁
导:3.基本理论:组合导航定义,想说的都在文献之中...重点关注红色下划线处小结:惯性系统和GPS导航系统各有优缺点,但在误差传播性能上正好是互补的,前者长期稳定性差,但短期稳定性好,而后者正好相反;组合导航技术是指使用两种或两种以上的不同导航系统对同一信息源作测量,从这些测量值的比较值中提取出各系统的误差并校正之。采用组合导航技术的系统称为组合导航系统。参与组合豹各导航系统称为子系统。注意: 由
1.can协议-物理层 (1) 与 I2C、SPI等具有时钟信号的同步通讯方式不同,CAN通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有 CAN_High和 CAN_Low两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯(485通讯也是差分信号,提高抗干扰)。如图:控制器与收发器之间通过CAN_Tx 及 CAN_Rx信号线相连,收发器与 CAN 总线之间使用 CAN_H
基本协议的熟练使用,解决你传感器读取原始数据;打开了元件之间通讯的通路;接下来,对飞控就是数据处理算法作总结;总结的基础算法包括:估算算法和控制算法======================================1估算算法:•1.传感器驱动编写&地面站上位机的使用 最基本的协议:UART、I2C,SPI、CAN… http://ardupilot.org/dev/
导:IMU即惯性测量单元,区别于以下几个概念 (1) AHRS(9轴<--算法-->3姿态角)Attitude and Heading Reference System称为航姿参考系统包括多个轴向传感器,能够为飞行器提供航向,横滚和侧翻信息(PITCHA,ROLL,YAW),这类系统用来为飞行器提供准确可靠的姿态与航行信息。航姿参考系统包括基于MEMS的三轴陀螺