
写文章




- @weixin_72056722
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
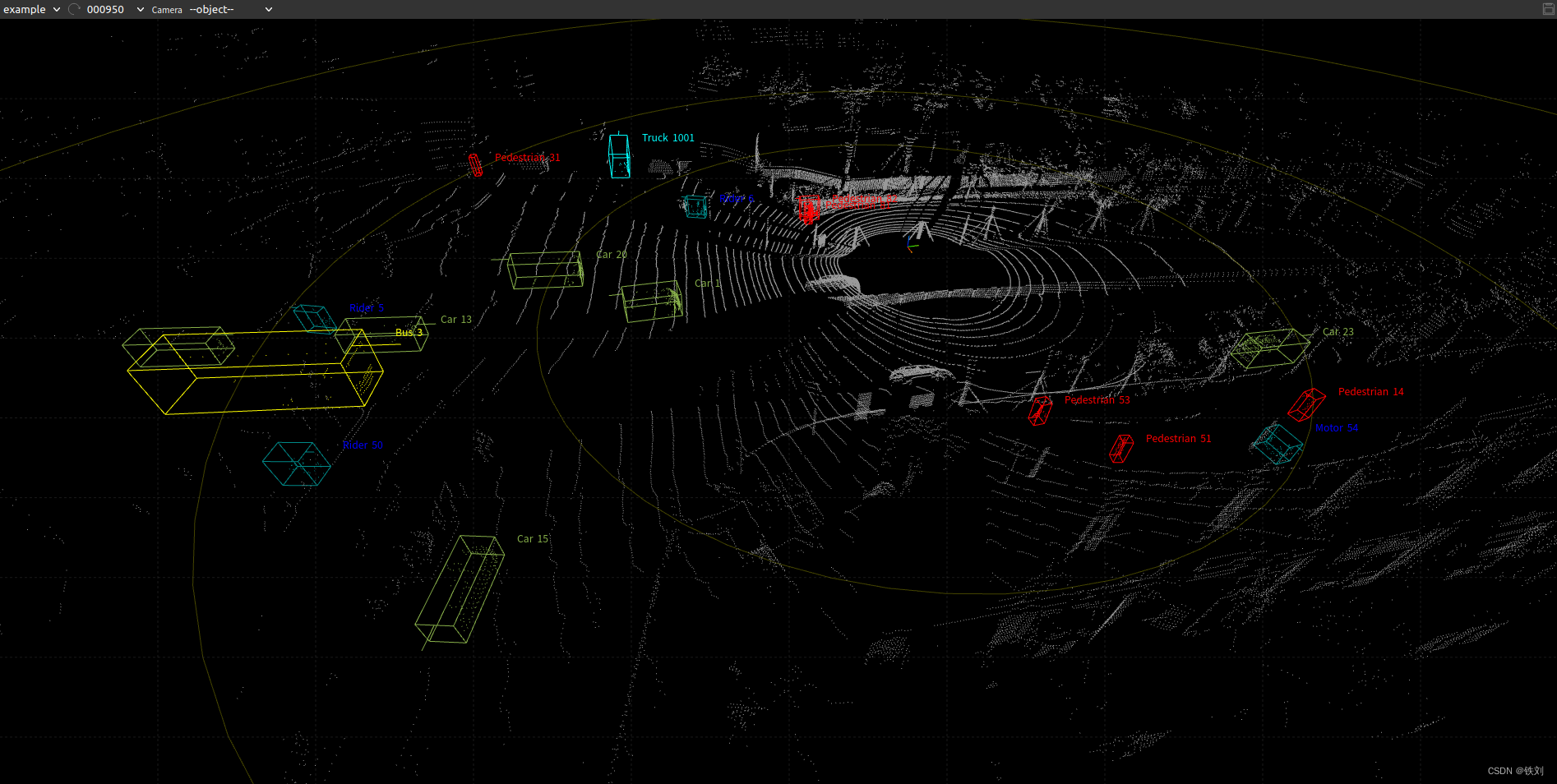
3D点云目标检测标注软件SUSTechPOINTS: Point Cloud 3D Bounding Box Annotation Tool For Autonomous Driving安装指南
3D点云目标检测标注软件SUSTechPOINTS安装教程(目前全网首例详细教程)

报错:Torch not compiled with CUDA enabled看这一篇就足够了
报错:Torch not compiled with CUDA enabled看这一篇就足够了

超详细记录windows+Ubuntu跑通RandLaNet实验踩坑记录(数据集:Semantic_Kitti+Semantic 3D)
本篇文章记录了整个复现过程遇到的报错等问题,如果大家也遇到报错了不妨从文章中找一找,也许就能找到对应的解决办法。需要准备好semantic_kitti完整的数据集,将数据集中每个场景按下图进行布置。可以直接利用官网下载下来的数据集中data_odometry_labels这个文件夹,直接将其中的数据复制成一个新的文件夹即可。阅读,data_prepare_semantickitti.py脚本,更改

3D点云目标检测标注软件SUSTechPOINTS: Point Cloud 3D Bounding Box Annotation Tool For Autonomous Driving安装指南
3D点云目标检测标注软件SUSTechPOINTS安装教程(目前全网首例详细教程)
超详细记录windows+Ubuntu跑通RandLaNet实验踩坑记录(数据集:Semantic_Kitti+Semantic 3D)
本篇文章记录了整个复现过程遇到的报错等问题,如果大家也遇到报错了不妨从文章中找一找,也许就能找到对应的解决办法。需要准备好semantic_kitti完整的数据集,将数据集中每个场景按下图进行布置。可以直接利用官网下载下来的数据集中data_odometry_labels这个文件夹,直接将其中的数据复制成一个新的文件夹即可。阅读,data_prepare_semantickitti.py脚本,更改
到底了