
写文章




- @weixin_64115506
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务

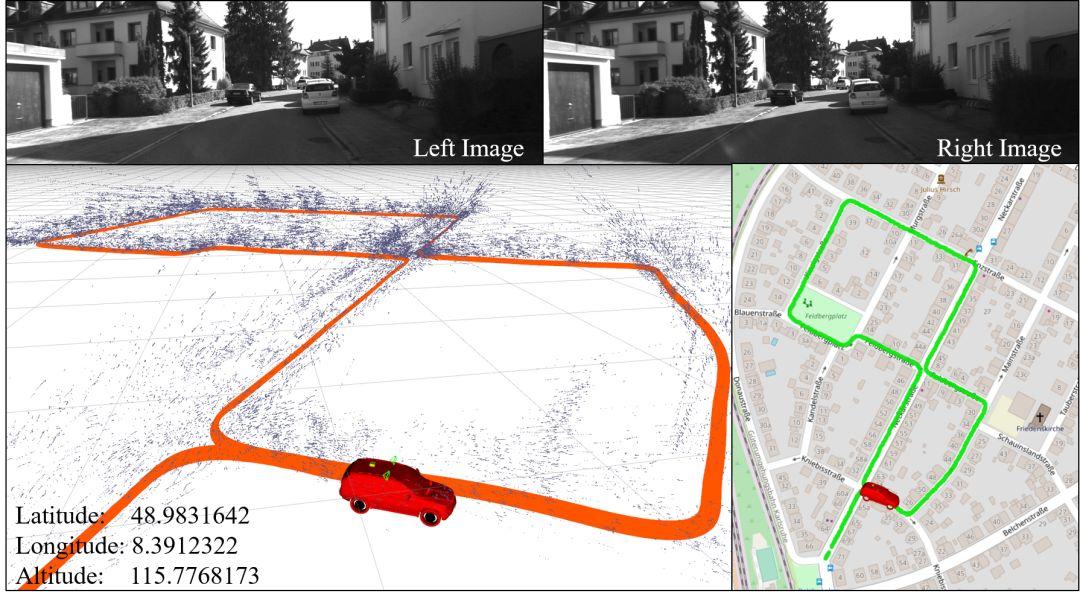
VINS-Fusion的IMU+GNSS+视觉导航调研报告
VINS-Fusion 是继 VINS-Mono 和 VINS-Mobile(单目视觉惯导 SLAM 方案)后,香港科技大学开源的双目视觉惯导 SLAM 方案,VINS-Fusion 是一种基于优化的多传感器状态估计器,可实现自主应用(无人机,汽车和 AR / VR)的精确自定位。VINS-Fusion 是 VINS-Mono 的扩展,支持多种视觉惯性传感器类型(单目摄像机+ IMU,双目摄像机+
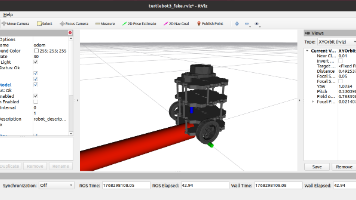
Ubuntu20.04 ROS Noetic使用turtlebot3仿真gmapping
如有侵权可联系删除。一、环境配置1.安装依赖本人使用VMware虚拟机进行仿真,操作系统为Ubuntu20.04,ROS版本为Noetic,在安装依赖前需要先将上述环境配置好。(1)安装 ROS Noetic 版本下与 Gazebo 仿真相关的两个软件包,即 ros-noetic-gazebo-ros-pkgs 和 ros-noetic-gazebo-ros-control。安装完成后,就可以在
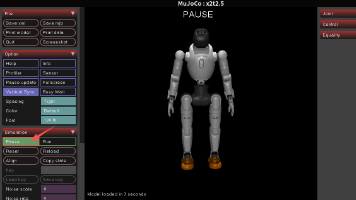
智元人形机器人:开发环境配置
配置一个稳定、完整的开发环境,是开启人形机器人的第一步,本文旨在提供一份能够导入智元机器人仿真的配置流程。跟随以下步骤,将一步步搭建开发环境。这篇文章,该文章主要记录复现过程,并非原创。
到底了