
写文章




- @weixin_63170160
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
python/opencv利用两个2D图像像素坐标测量3D世界坐标的真实距离
最近在做一个项目,使用摄像头去测量两个像素点之间的真实距离,我之前并未接触过相关知识,我查了大量的资料完成了简化版的测距问题,就是要求所有点在Z轴方向(深度方向)等于0,就是相当于在一个平面上求两个像素点之间的距离,因为我拍摄的所有照片都是使用我手机摄像头进行拍摄的,只有单个摄像头,无法获取深度方面的信息,我通过查阅资料得知单个摄像头是无法准确测量3D世界坐标的真实位置的,需要两个摄像头或者一个摄

深度学习模型部署
在将模型部署之前,往往需要对模型进行一系列优化,包括量化(从浮点数到整数)、剪枝(移除不重要的权重)、蒸馏(用一个小模型模仿大模型的表现)等。:目前可用的方案有模型蒸馏,模型剪枝和模型量化,一般的做法是先做模型蒸馏, 得到小模型之后进行模型剪枝, 再对剪枝过后的模型进行量化处理。:如果你的应用不需要极高的吞吐量,且可以容忍一定的延迟,那么你可以选择将模型部署在一台具有适当GPU的个人电脑上或者数据

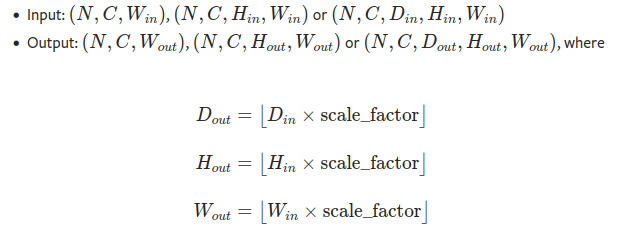
nn.Upsample函数
参考。
到底了