




- @weixin_55171106
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
core0初始化时钟、外设、内存、释放core1在时钟初始化部分,基本外设都挂在在cpu0,cpu1的邮箱挂在cpu1init-pmp 定义nocache区,方便双核进行数据交换释放core1core1初始化内存。

当示例正常运行的时候,串口终端会打印如下信息:Core 0:Core 1:一旦Core1程序启动之后, Core 1将会将从Core 0接收到的信息返回给Core 0,测试将在Core 0的调试串口将可以看到:
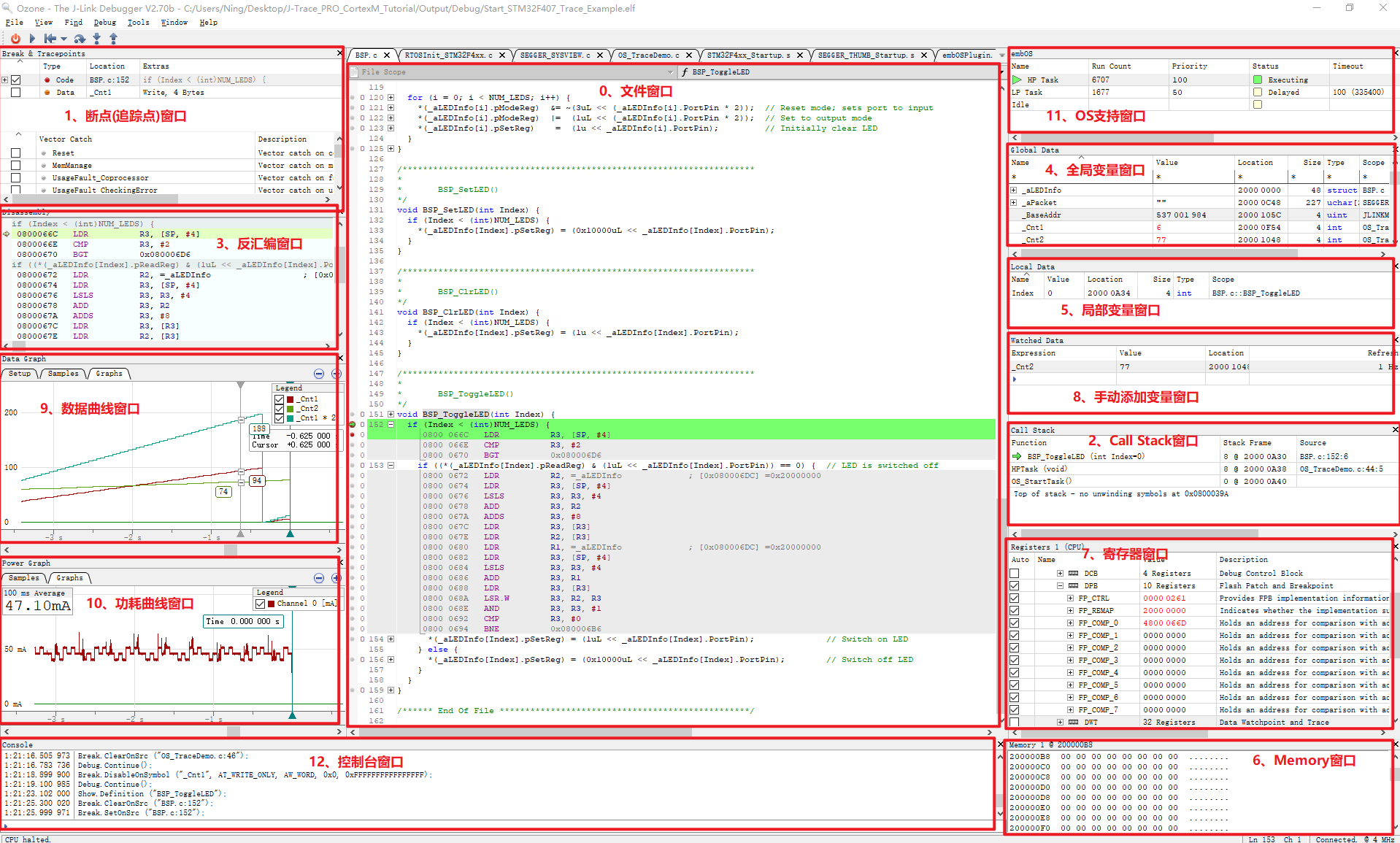
与其他IDE没有什么不同,不过比较奇怪的一点是,Ozone支持的STM32一些内核的寄存器(比如DPB、或者DWT等)ST官方手册都没有仔细些,ARM的一些Core的手册才给出的寄存器。这个功能我没有在keil中看到过,不过感觉还挺好用的,将实际编译进镜像的所有全局变量全部显示出来,因为STM32的所有全局变量都是有固定内存地址的,所以内存地址、数据类型、以及定义所在文件,都可以直观显示出来。再次
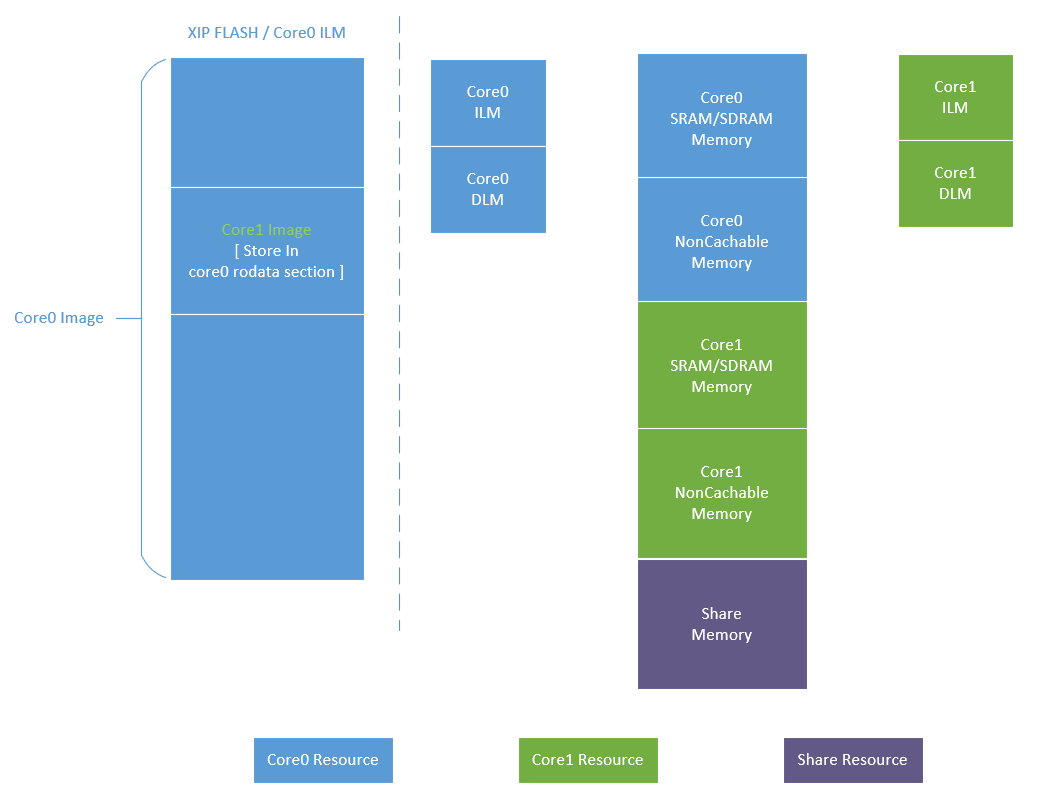
Core0 和 Core1 是两个独立的Core,每个Core有自己内部独立的资源,例如ILM/DLM、PLIC、MCHTMR、FGPIO、PMP/PMA等;二者也有SOC共享的外设资源,例如AXI_SRAM、UART、DMA等。在双核设计时,需要规划好内存资源和外设资源的分配。系统总是从Core0启动,Core1不能自启动,因此Core0为主核,Core1为从核。Core0启动后,会对SOC的基
第一次触发此事件时,GATT 事件处理程序会捕获该事件并将其分配给配置文件 A,然后将该事件转发到配置文件 A 的 GATT 事件处理程序。对 BLE 扫描参数进行配置,以便扫描类型处于活动状态(包括读取扫描响应),它是公共类型,允许读取任何广告设备,并且扫描间隔为 100 毫秒(1.25 毫秒 * 0x50)和 60 毫秒(1.25 毫秒 * 0x30)。为了获取设备名称,我们使用函数,该函数获

控制方法:基于力和力矩的MPC;有ros noetic(c++)和matlab两个版本实现。matlab+gazebo仿真使用了icub-gazebo-wholebody的环境。人形机器人icub的WBC控制。:基于OCS2和ros控制的腿式机器人非线性。步态控制器,它将足部放置解决方案作为输入。宇树机器人改成垂直结构;在gazebo中的一些任务下的模型。带 WBC 的 MPC 和仅。:四足机器狗
