
写文章




- @weixin_50844034
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
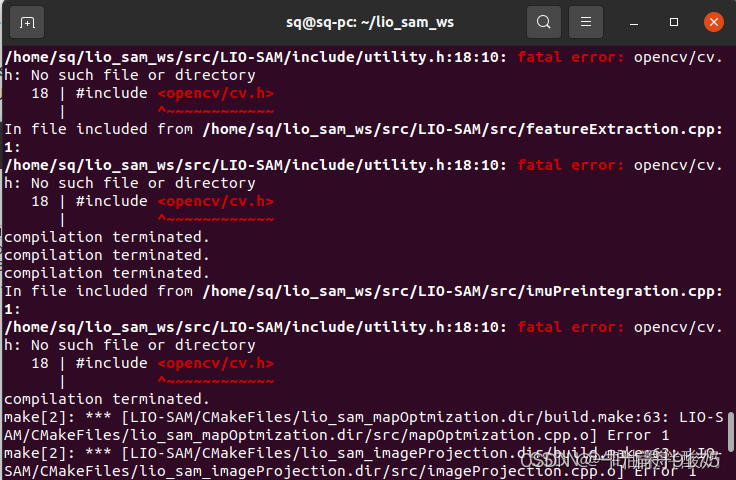
【ubuntu20.04部署lio-sam算法】
本文简介在 Ubuntu 20.04 下以 ROS noetic 为基础安装 GTSAM 并成功编译 LIO-SAM 的算法。
linux下修改串口权限
只要不拔串口或者电脑不关机,该串口将可以一直使用。

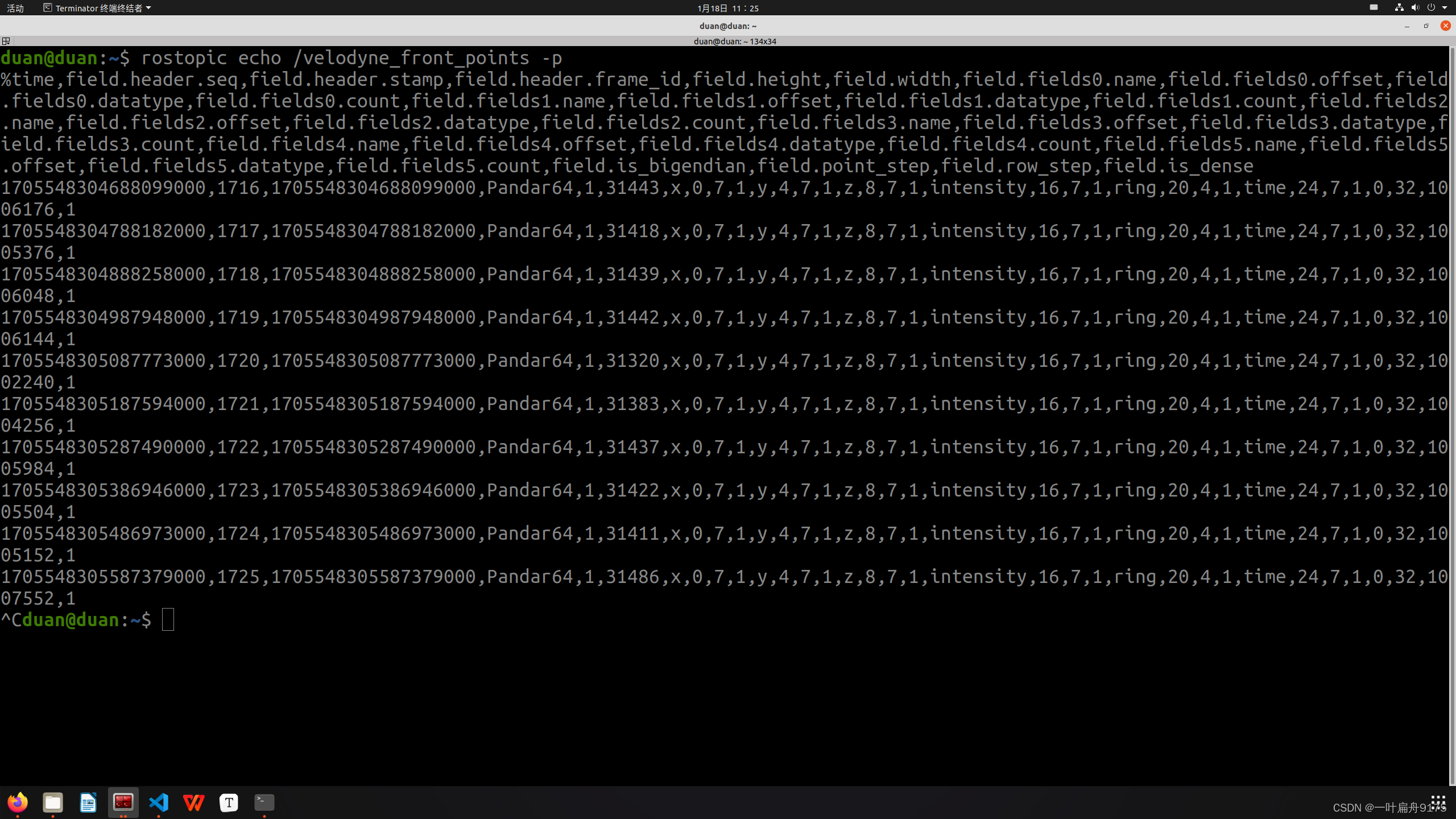
禾赛、速腾三维雷达适配lio-sam、fast-lio2建图算法
lio-sam与fast-lio2算法,对于机械雷达而言,均只适配了Veloyne雷达,而对国内的雷达均不适配。国内速腾、禾赛等雷达需要将点云数据结构转化为Veloyne结构,进而运行lio-sam、fast-lio等建图算法,本文主要讲解速腾、禾赛雷达数据格式与Velodyne数据格式之间的转换。
利用c++基于ffmpeg库接收rtsp视频数据,并利用udp将以RTP协议将数据发送,同时利用udp接收RTP数据包,并基于ffmpeg库播放视频。
另外,上述代码只是示例,并不保证在所有环境中都能正常运行。应根据实际情况,考虑系统架构、网络带宽、传输协议、解码器等因素,综合进行调整和优化。需要注意的是,为了使两段代码配套使用,请确保两段代码中RTP端口号相同,并且发送端的IP地址需要设置为接收端的地址。任务一:基于ffmpeg库接收rtsp视频数据,并利用udp将以RTP协议将数据发送。任务二:利用c++利用udp接收RTP数据包,并基于ff

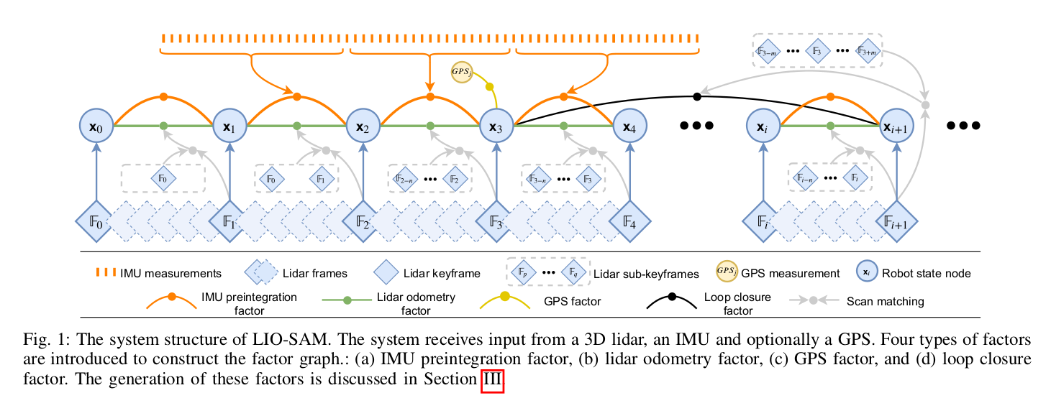
3D激光SLAM总结及A-LOAM、LIO-SAM算法安装及运行
LOAM为清华自动化本科毕业的Zhang Ji博士在CMU读博期间,于2014年在RSS期刊发表的关于三维激光传感器的SLAM算法。没有回环检测;计算时间复杂度较高,基于三维空间中的位姿进行优化;户外可能受到各种噪声影响,例如树上摇晃的树叶,地上的杂草。而这些点未必会重复出现在前后两帧激光中。而错误的特征点将会影响位姿精度。LOAM需要提取平面点和边缘点,由于车体上下颠簸,竖直维度提取的平面点很容
到底了