




- @weixin_47077788
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
嵌入式软件工程师面试题分享(1)

嵌入式软件工程师面试题收录2
嵌入式软件面试题收录4
嵌入式软件工程师面试题分享(1)
mbfuncdisc.c主要是对离散量的一些描述。当主机接收到02等功能码时,会进入对应功能码处理函数。
IIC框架
内部结构复杂。芯片中含有GRAM(即显存),GRAM中每个存储单元都对应液晶面板的一个像素点。通过液晶控制器内部各种模块共同作用把GRAM存储单元的数据转化为液晶面板的控制信号,使像素点呈现特定的颜色,而像素点组合起来则成为了一幅完整的图像。ILI9341液晶控制器根据自身的IM[3:0]信号线电平决定了它与MCU的通讯方式,支持SPI、8080通讯方式。野火指南者中固定搭配8080(内部硬件电路

读写时A0~A11作为行地址线输入,A0~A7作为列地址线输入。一个bank有12根行地址、8根列地址,总线宽度为16位,所以SDRAM容量=4*4096*256*16=64Mb=8MB。CKE高电平时使用AUTO REFRESH,通常显高电平,只有在使用SELF REFRESH时CKE低电平。在写入(0个时钟延迟)和读取(2个时钟延迟)期间激活或停用DQ。在配置SDRAM工作状态时发送对应指令。
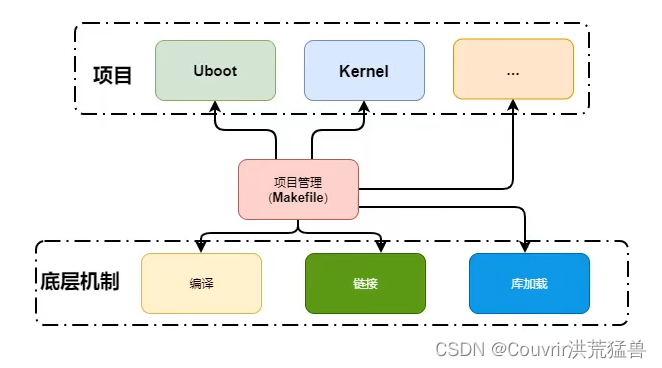
学习了Makefile变量,对先前的mp3进行加深。
与有刷电机相比,无刷直流电机将转子和定子交换(即使用电枢绕组作为定子,使用钕铁硼的永磁材料作为转子),以霍尔传感器取代碳刷换向器,性能上比一般的直流电机有很大优势。无刷直流电机(Brushless Dirent Current Motor,简称BLDCM)由电动机主体和驱动器组成,无电刷和无换向器,是除了有刷电机外用得最多的一种电机。有刷直流电机是根据额定工作电压来标注额定转速的,无刷电机引入了K