- @weixin_45910027
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在古月居gazebo 的基础教程里,运行古月居的mbot的launch文件报错,小机器人不出现。主要原因是提供的xacro文件的宏定义没有放在xacro的命名空间。
git 解决每次更新代码都要输入用户名和token的解决方案
ubuntu20.04 ROS打开gazebo 世界一片灰,模型没有显示颜色
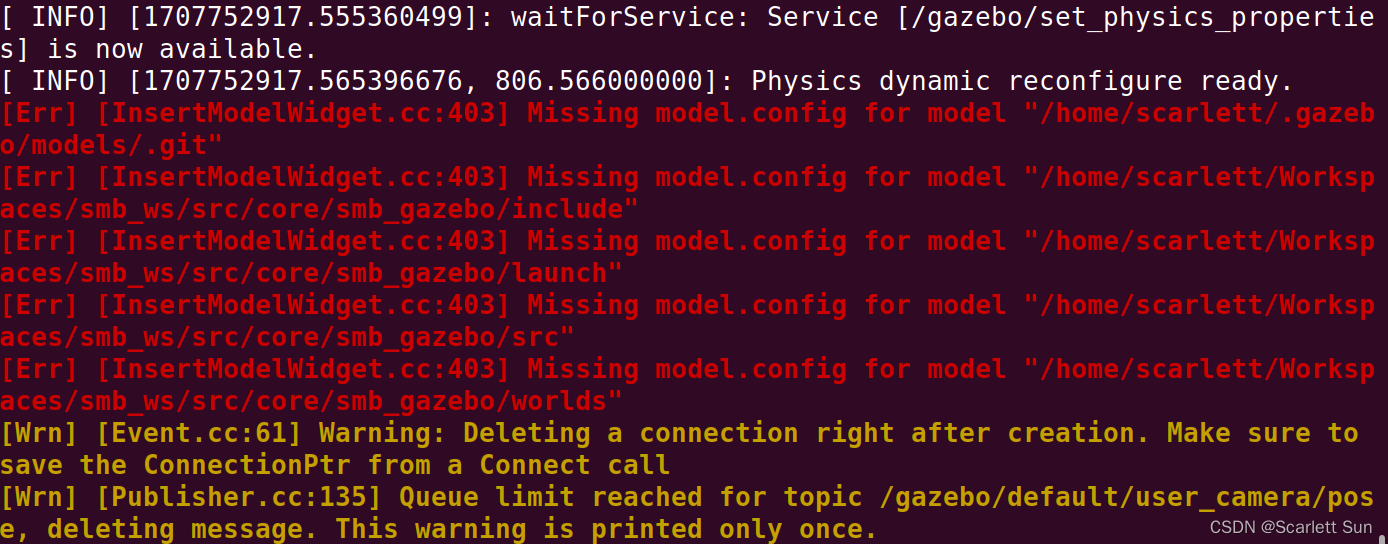
后面发现,运行launch命令时,一直处在某个conda环境下,也是按照教程创建的提示创建的,尝试退出conda环境。运行launch文件后,gazebo中世界文件加载了,但是机器人模型没有加载出来,之前没有遇到过这种情况。不影响主要功能,暂且不管这些红色报错。不要conda环境下运行ros命令。然而一开始飘红的那些错误提示依然存在。
Ubuntu下使用ROS2自带的opencv4,VScode error: opencv2/opencv.hpp: No such file or directory.
在古月居gazebo 的基础教程里,运行古月居的mbot的launch文件报错,小机器人不出现。主要原因是提供的xacro文件的宏定义没有放在xacro的命名空间。
输入该快捷键名称(自定义),然后输入command(我这里是最简单的flameshot gui,详见官方文档),快捷键我这里跟windows的保持一致,按照个人习惯来即可。

Tune Meanings (Pixhawk Series)
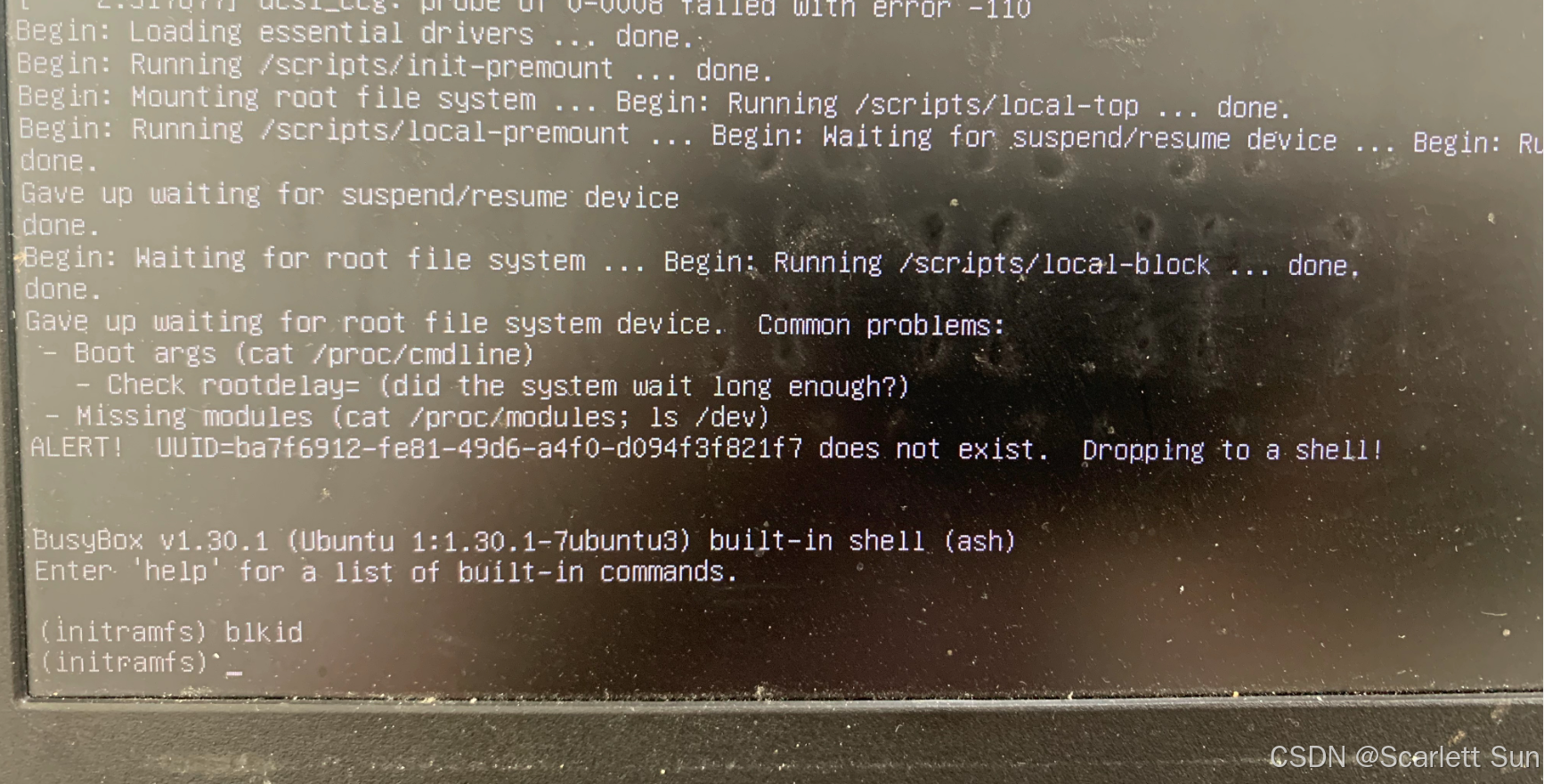
重启电脑,在开机时长按F12进入bios setup,然后将 SATA 操作参数从 RAID 切换到 AHCI。保存设置,并退出,继续启动即可。在 Ubuntu 22.04 启动时进入 initramfs 界面,并提示。