- @weixin_45291614
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
PX4-Autopilot仿真平台是由PX4官方提供的集虚拟px4固件、真机烧录固件、gazebo环境及模型于一体的平台,用户可以自己编写程序,通过mavros接口与虚拟px4固件进行mavlink协议的通讯,并在gazebo中显示虚拟世界和模型。因此PX官方手册里给了一个经典的例程:offboard.cpp和offboard.py,让用户通过程序开发,实现无人机自主功能。

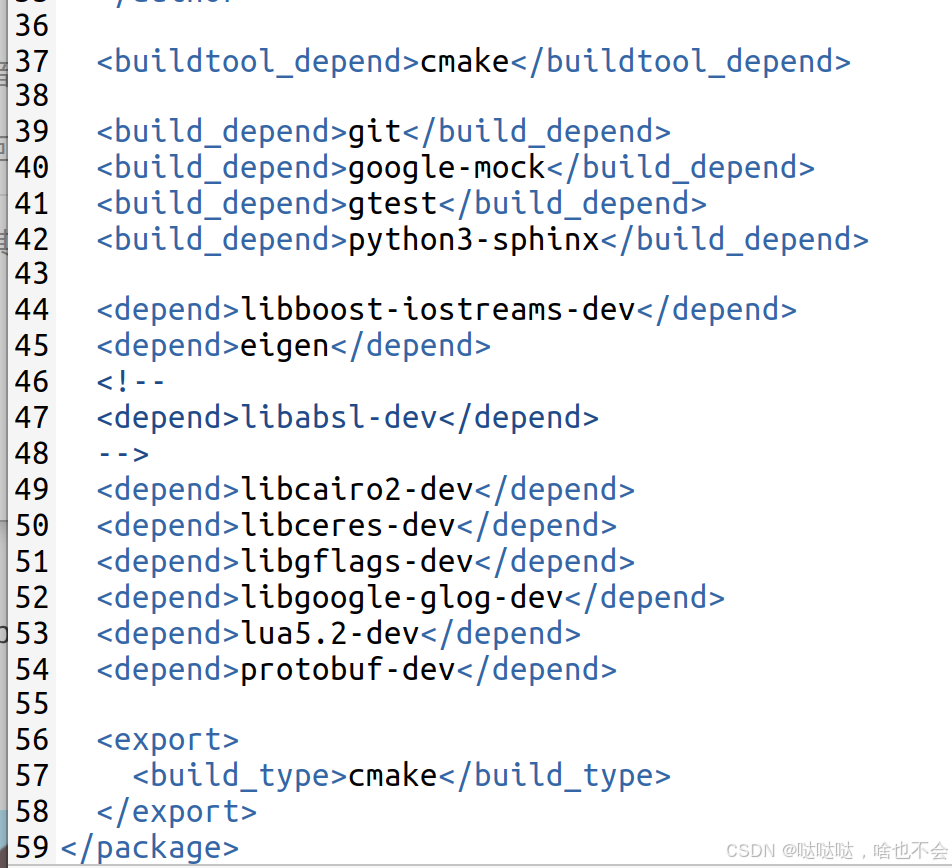
Ubuntu-20.04安装cartographer的两种方法
easyconnect拉起虚拟网卡失败
Ubuntu20.04作为一个过渡的ubuntu长期支持版本,它既可以安装ROS noetic,也可以安装ROS foxy(foxy是第一个ROS2发行版了)。而Ubuntu22。04后续只支持的ROS2发行版。如果想在 22.04 使用 ROS Noetic 只有自己编译ros noetic源码了。但新手哪里愿尝试这个呢,如果有人编译好并通过一些打包方式发行到ubuntu支持的第三方软件源上,那
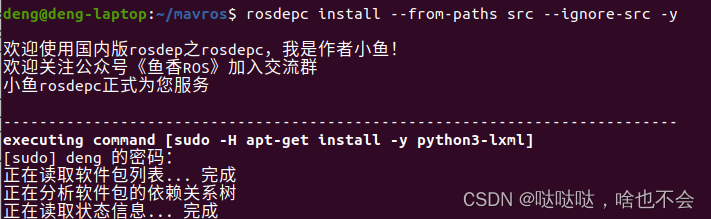
此外再提一下,安装ros时未能成功安装rosdep2的,请移步我的下面两条博客。3、获取mavlink和mavros的下载信息,并将它写入~/mavros/mavros.rosinstall文本里(下载目录可以自己修改)2、其中最后一步是往系统目录下下载安装一些地理图集之类的东西,如果下载失败,就多试几次。然后在 /usr/share/ 路径下创建一个名为 GeographicLib 的文件夹,然
也可以在开机项选择时,正常启动,这时屏幕是黑的,左上角可能还会有一条短横线,这时可以进入TTY模式:Ctrl + Alt + Fn2(Fn3-Fn6都可以试下),然后输入用户名、密码登陆,就可以敲命令了。现在不是可以敲命令吗,我们可以先将笔记本的显卡切换到集成显卡,就可以正常开机进入图形界面,后面就不用我说了吧。可以在开机项选择时,点击高级选项,进入recovery模式,然后选择root ,就可以