
写文章




- @weixin_44298961
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
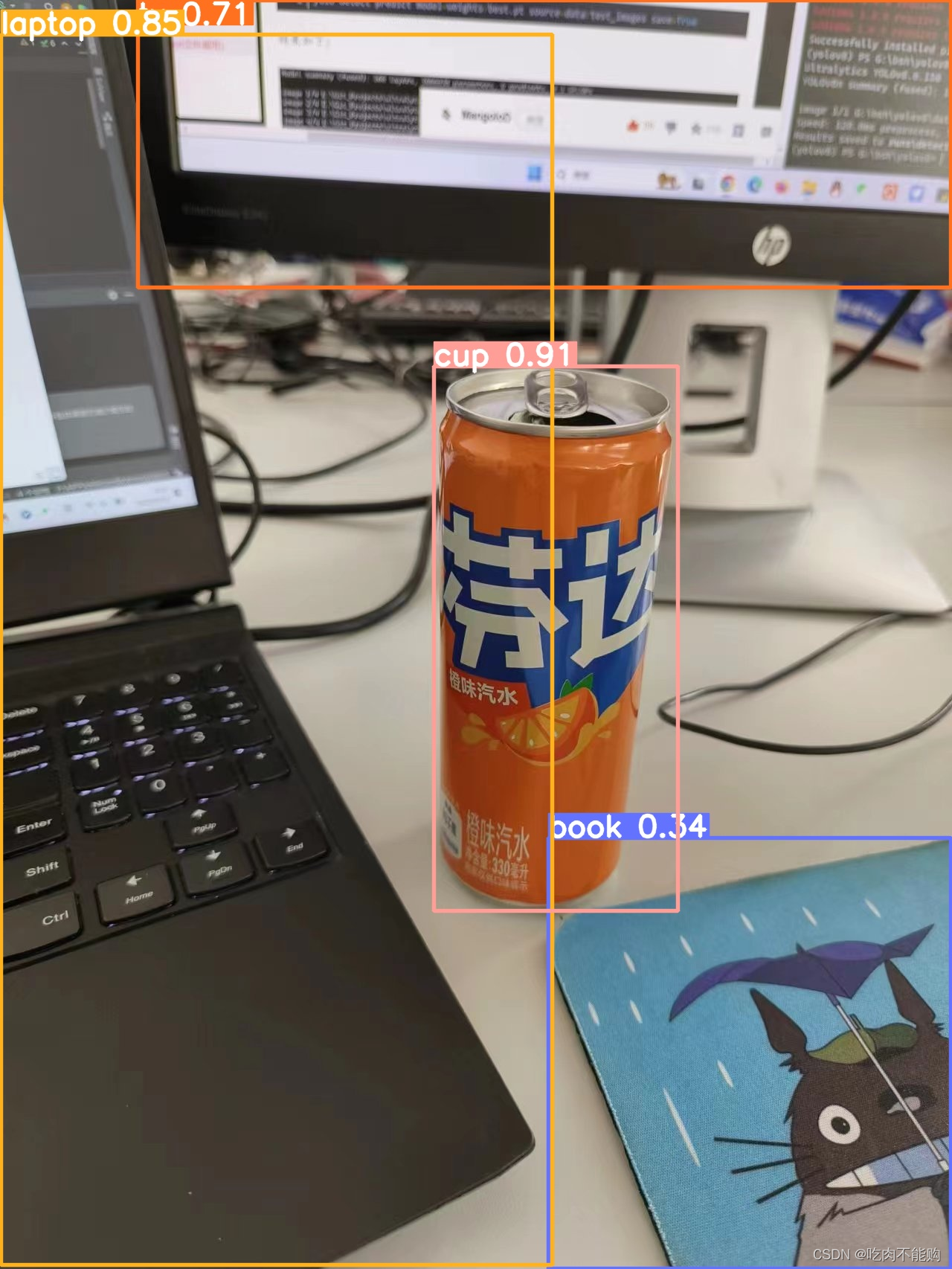
无脑008——yolov5目标检测全流程,训练自己的庞大数据集,半自动标注数据集
使用yolov5进行自己数据集的目标检测,以及使用yolov5自带的detect.py实现数据集的半自动标注

复现Oriented R-CNN RTX 2080Ti
复现Oriented R-CNN RTX 2080 Ti
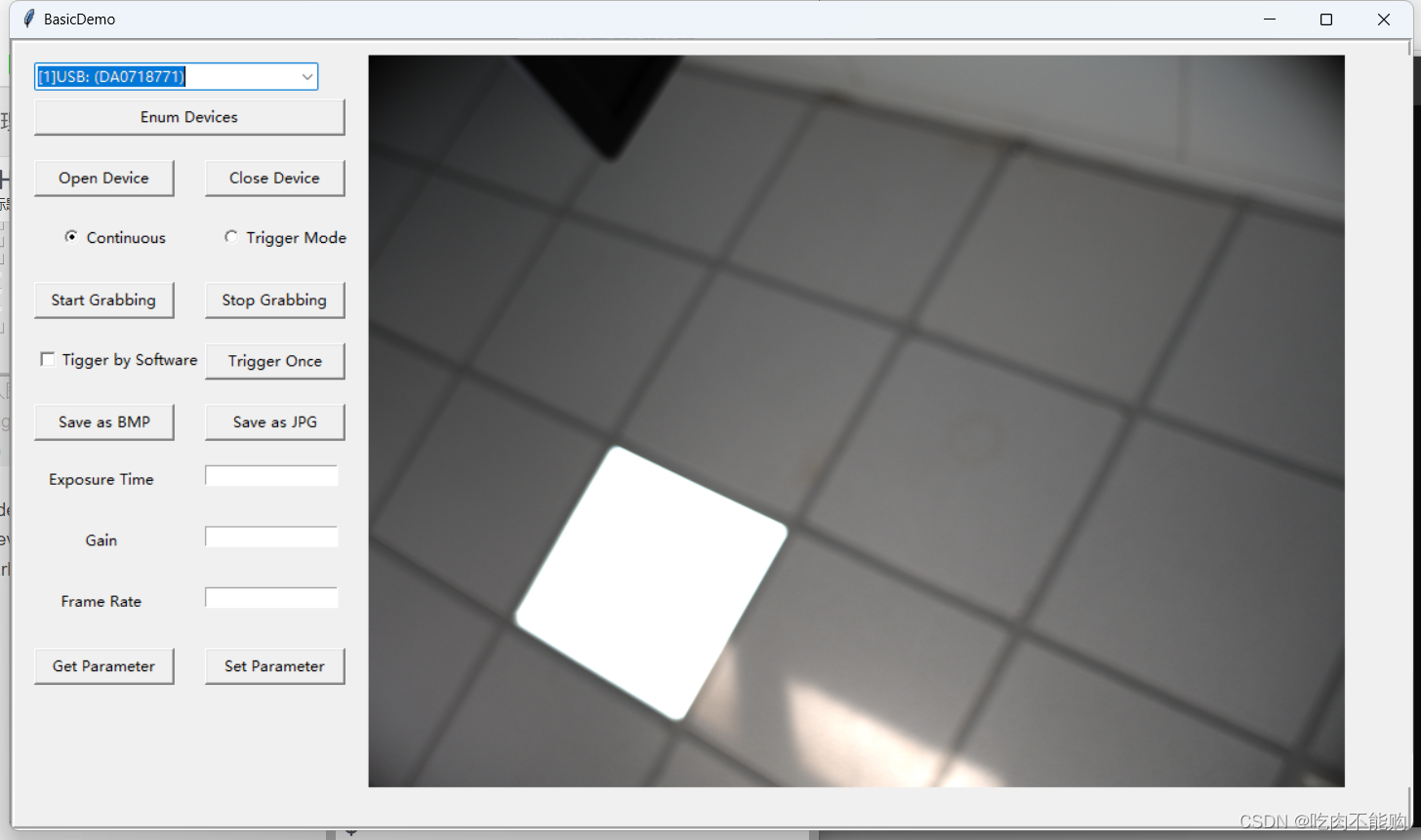
win11 电脑 使用 python 连接USB 海康工业相机 运行示例程序 BasicDemo.py 并添加连续捕捉图像(可以自己合成视频)的两个按钮
win11 电脑 使用 python 连接USB 海康工业相机 运行示例程序 BasicDemo.py。
无脑008——yolov5目标检测全流程,训练自己的庞大数据集,半自动标注数据集
使用yolov5进行自己数据集的目标检测,以及使用yolov5自带的detect.py实现数据集的半自动标注
无脑008——yolov5目标检测全流程,训练自己的庞大数据集,半自动标注数据集
使用yolov5进行自己数据集的目标检测,以及使用yolov5自带的detect.py实现数据集的半自动标注
无脑——010 复现yolov8 使用yolov8和rt detr 对比,并训练自己的数据集,标签自动标注
使用ultralytics框架运行yolov8,RTDETR
到底了