




- @weixin_43880007
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
动手学深度学习Pytorch环境搭建
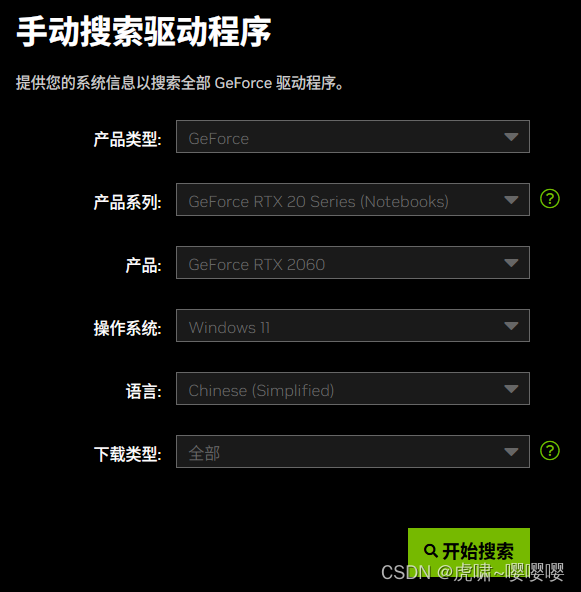
动手学深度学习Pytorch环境搭建
定位是自主机器人至关重要的能力与关键使能技术。尽管深度学习在许多计算机视觉任务上取得了巨大进展,但在“度量级(metric)视觉定位”能力提升方面仍未产生显著影响。主要障碍之一,是现有基于 CNN 的位姿回归方法难以泛化到先前未见过的地点。我们此前提出的CMRNet通过在 LiDAR 地图中实现与地图无关(map independent)的单目定位有效解决了这一限制。本文在此基础上进一步提出CMR
视觉场所识别(VPR)是增强现实和机器人定位等多个应用中的核心任务。在过去十年中,VPR领域的主流方法使用基于全局聚合的特征表示,例如NetVLAD。这些特征适用于大规模VPR,并对视点变化具有鲁棒性。然而,基于VLAD的聚合方法通常学习大量(例如64个)簇及其对应的簇中心,这直接导致生成的全局特征维度很高。更重要的是,当训练和推理数据之间存在域间隙时,训练集上确定的簇中心通常不适合推理,导致性能
动手学深度学习Pytorch环境搭建
PR 的演变可视化为图2中的时间线。Lowry 等 [2] 提供了截至 2015 年的 VPR 全面历史分析。这一开创性综述阐述了 VPR 挑战,界定了 PR 系统的核心组件,并回顾了应对外观变化的主要解决方案。它将 PR 系统的本质提炼为三个基本模块,这些模块仍是现代解决方案的基础:(1) 用于视觉输入抽象的图像处理模块,(2) 表示机器人如何存储环境记忆的地图,以及 (3) 评估机器人处于先前
动手学深度学习Pytorch环境搭建