




- @weixin_43723625
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
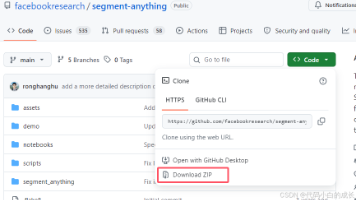
本文介绍了如何将官方仓库下载的源码安装到当前Python/Conda环境中。首先从GitHub下载segment-anything源码并解压,然后通过conda激活目标环境。进入源码目录后,使用pip install -e .命令将当前目录作为Python包安装到环境中。最后通过导入测试验证安装是否成功。这种方法可以在保留源码位置的同时完成环境配置。
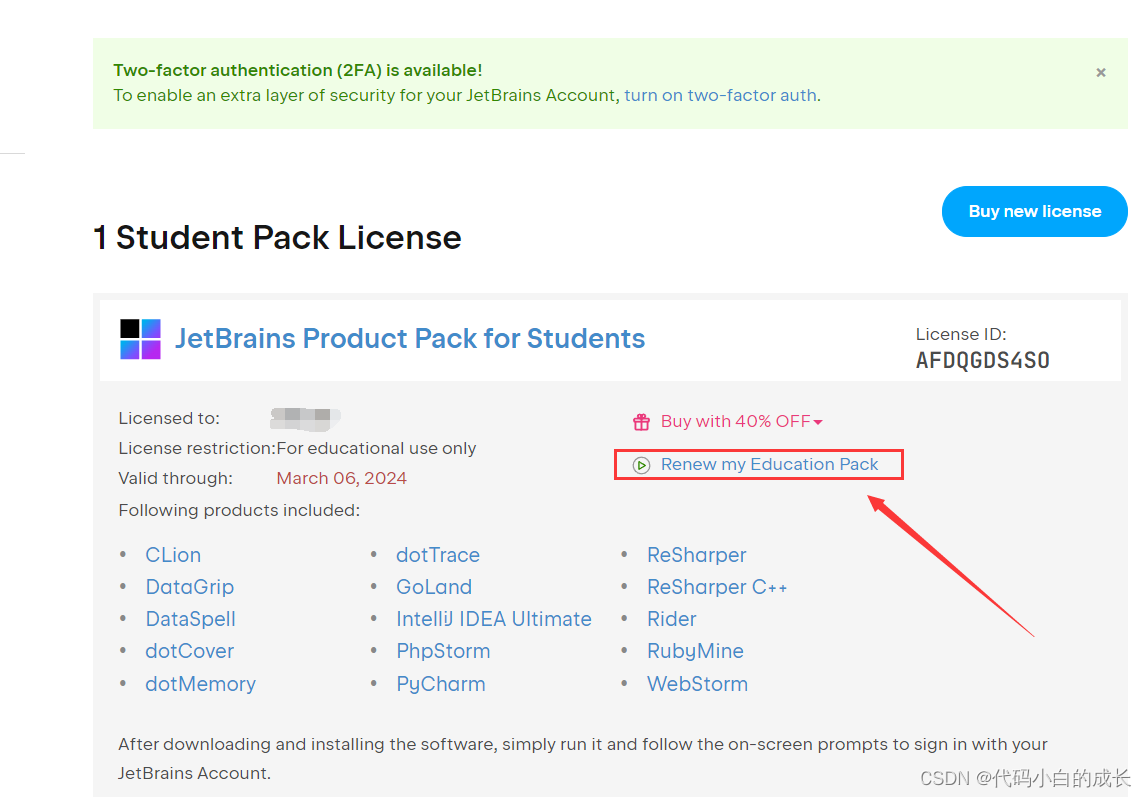
pycharm续期学生包
1. 安装JDK1.8介绍:JDK(Java Development Kit) 是 Java 语言的软件开发工具包(SDK). 在JDK的安装目录下有一个jre目录,里面有两个文件夹bin和lib,在这里可以认为bin里的就是jvm,lib中则是jvm工作所需要的类库,而jvm和 lib合起来就称为jre。https://jingyan.baidu.com/article/48b37f8d231c
搭建深度学习环境1. 下载与安装anacondawget是一个下载文件的工具wget https://repo.anaconda.com/archive/Anaconda3-2019.10-Linux-x86_64.sh安装命令sh Anaconda3-2019.10-Linux-x86_64.sh检查是否安装成功conda info问题(这个问题不一定出现):安装完anaconda3或者mini
搭建深度学习环境1. 下载与安装anacondawget是一个下载文件的工具wget https://repo.anaconda.com/archive/Anaconda3-2019.10-Linux-x86_64.sh安装命令sh Anaconda3-2019.10-Linux-x86_64.sh检查是否安装成功conda info问题(这个问题不一定出现):安装完anaconda3或者mini
说明:在pycharm编辑器调代码的时候,由于在每个.py文件之间的跳动较活跃。如果是代码编辑,还要有函数之间的调用。这就需要我能从工程目录去快速熟悉文件和查找。所以需要将工程中每个.py文件下的函数和类显示出来。方法一:查看某个具体文件.py内部的结构,可以通过左侧的structure来查看。如果左侧没有structure,可以通过view–>tool windows—>struct
搭建深度学习环境1. 下载与安装anacondawget是一个下载文件的工具wget https://repo.anaconda.com/archive/Anaconda3-2019.10-Linux-x86_64.sh安装命令sh Anaconda3-2019.10-Linux-x86_64.sh检查是否安装成功conda info问题(这个问题不一定出现):安装完anaconda3或者mini
在学校图书馆知识库中进行论文检索报告生成

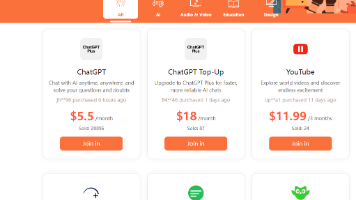
本文介绍了使用FamilyPro平台进行合租的流程。首先需要注册账号,然后选择适合的支付方式。文章提醒用户注意合租与独享的区别,特别指出共享方式可能存在信息泄露的风险。文中附有平台界面截图,展示了注册和支付选项页面。该指南为寻求合租解决方案的用户提供了基本操作指引和安全提示。
搭建深度学习环境1. 下载与安装anacondawget是一个下载文件的工具wget https://repo.anaconda.com/archive/Anaconda3-2019.10-Linux-x86_64.sh安装命令sh Anaconda3-2019.10-Linux-x86_64.sh检查是否安装成功conda info问题(这个问题不一定出现):安装完anaconda3或者mini