
写文章




- @weixin_41864918
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
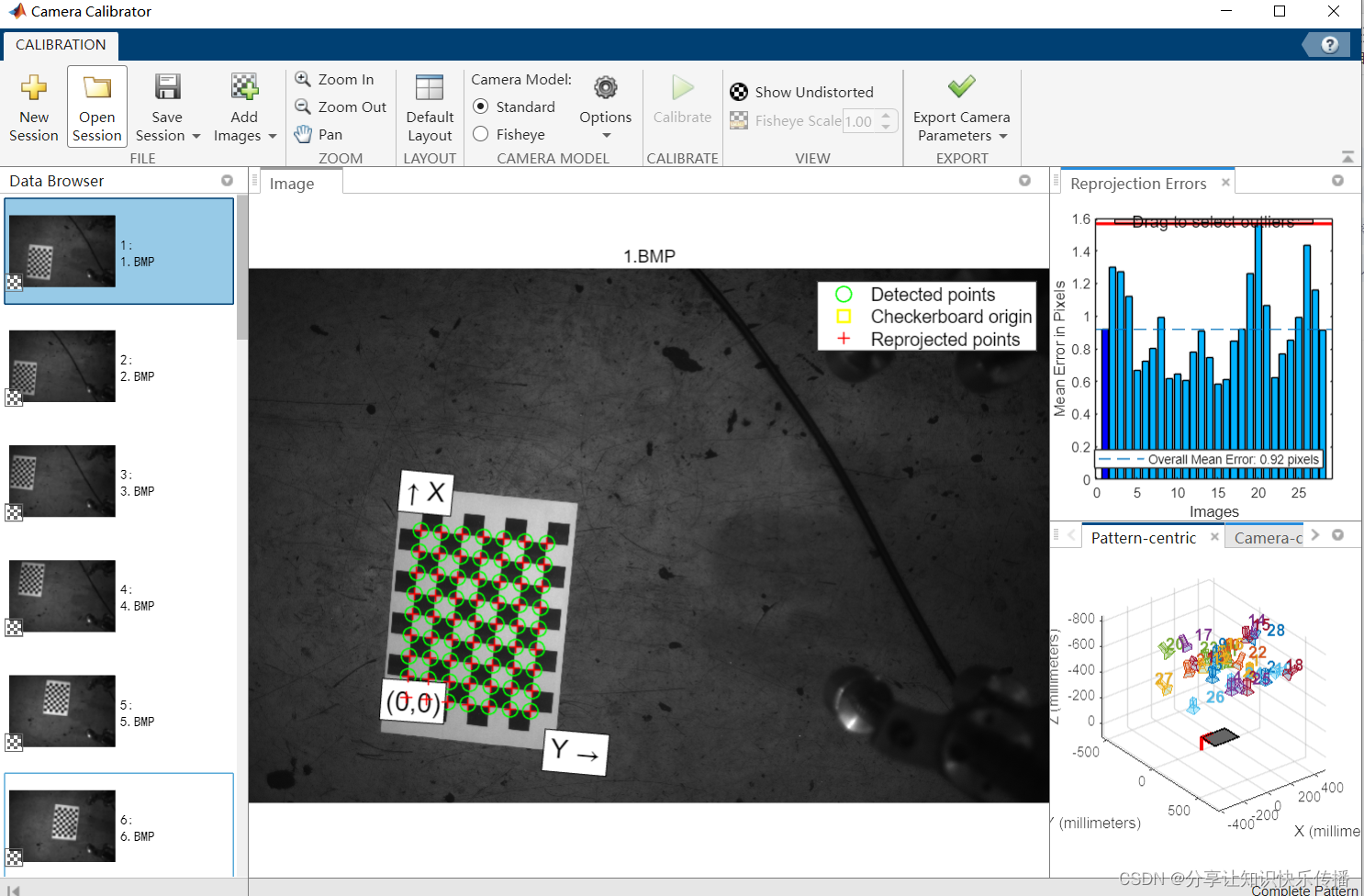
机械手眼标定实验步骤
将标定板放置在机械臂工作区域下,控制机械臂从不同位置和角度采集标定板的图像;每次数据采集从机械臂控制程序中读取机械臂基于基坐标下的空间位姿,并同该位姿下的图像对应保存;
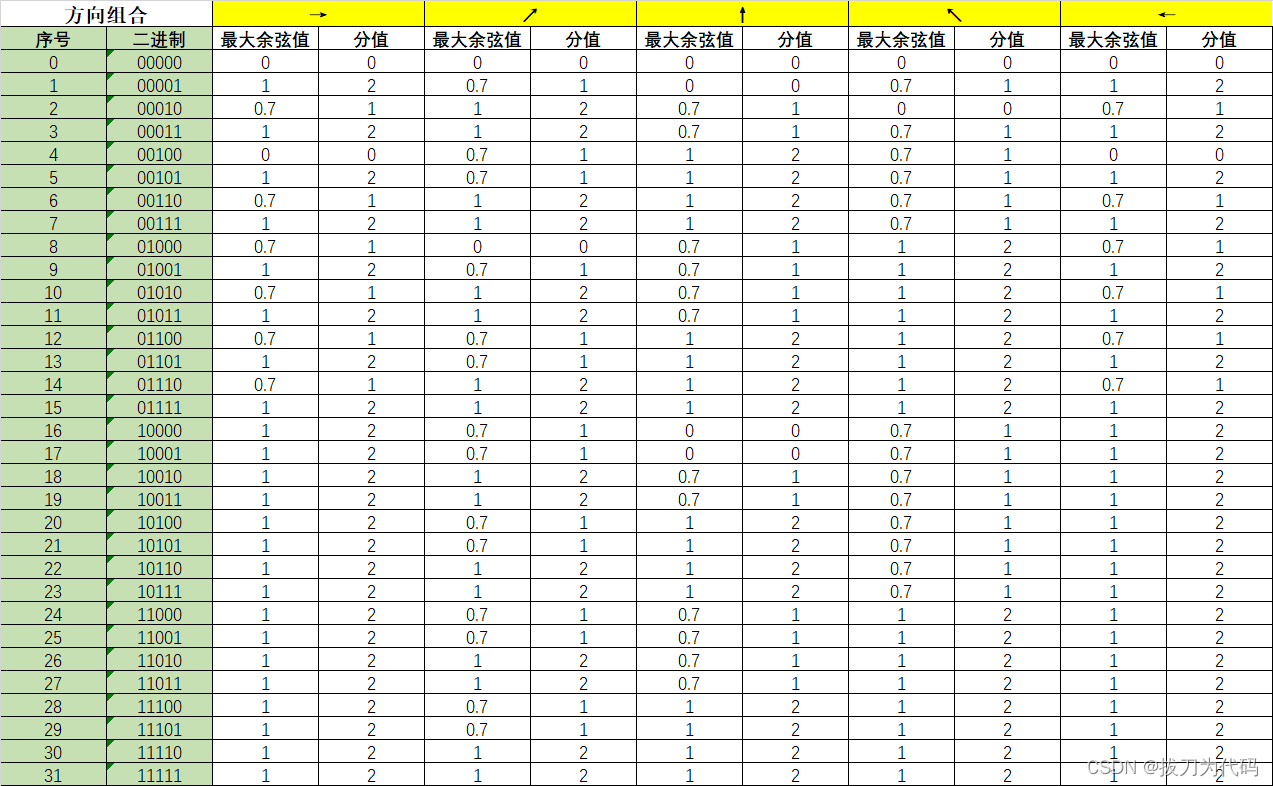
shape_based_matching代码解读0422
制作预响应表一、论文分析根据像素方向的二进制表示可以知道当前像素位置中是否存在该梯度方向。比如图片中当前的二进制数为11010,五位分别代表着不同的梯度方向。从左往右梯度方向1←1↖0↑1↗0→为了在程序执行时,高效算出图像的相似度,采用查找表的方式。制作查找表(以五个梯度方向举例):五位二进制可以计算得知有32个方向组合,每个方向制作一个预响应表,需要对每个方向同方向组合进行计算,那么需要制作一
YOLO数据训练效果评估
YOLOv5学习笔记
到底了