- @vQAvXEsg
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
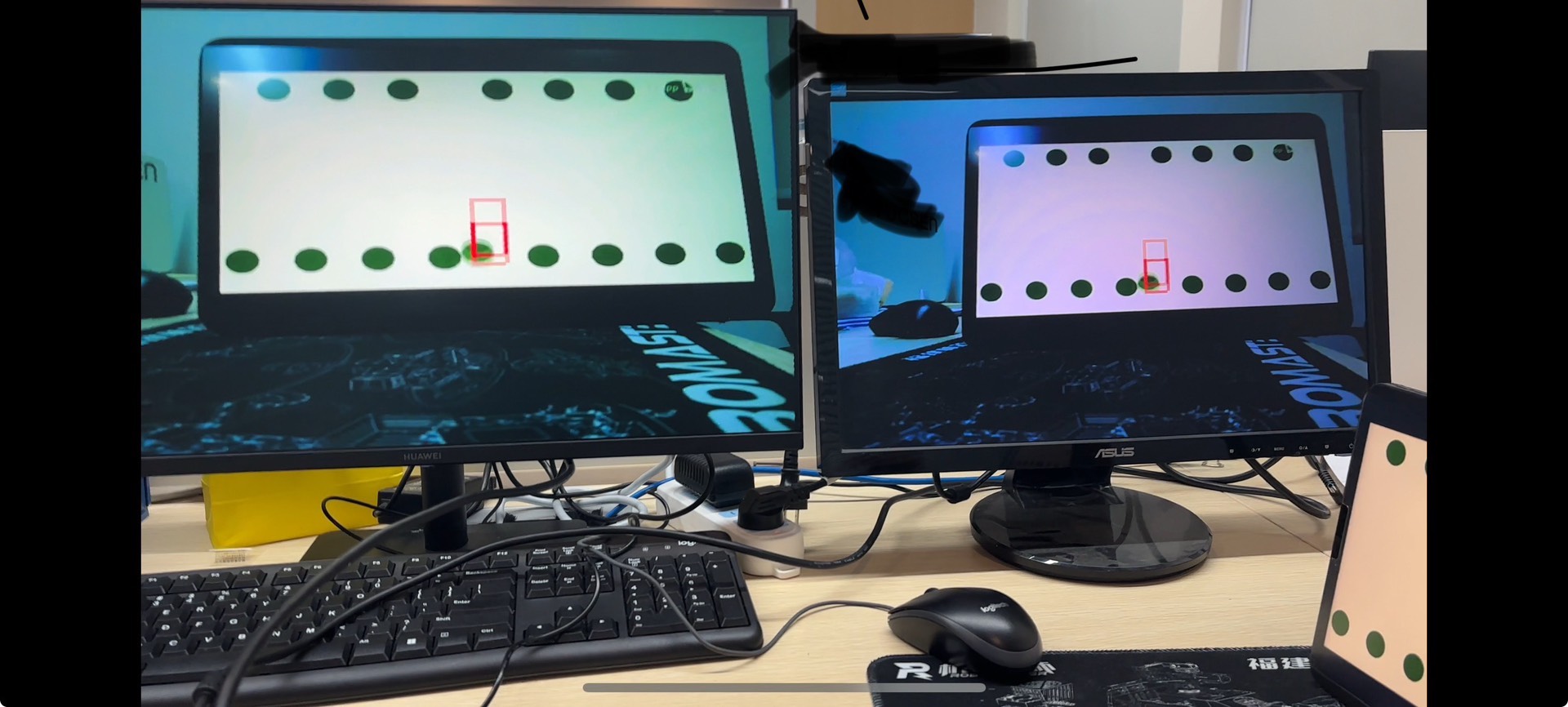
最后说说资源占用:帧差法核心模块大概消耗1200个LUT,形态学处理占800LUT,整个图像处理流水线控制在30%的逻辑资源内。这种方案比纯软件方案延迟低得多——从光信号进入摄像头到HDMI输出显示,整个链路延迟控制在3帧以内,用来做无人机避障或者智能门铃之类的场景完全够用。调参阶段建议在VGA接口上叠加OSD显示调试信息,比如用红色边框标记运动区域,同时显示当前帧率和阈值参数。实测时发现直接跨时
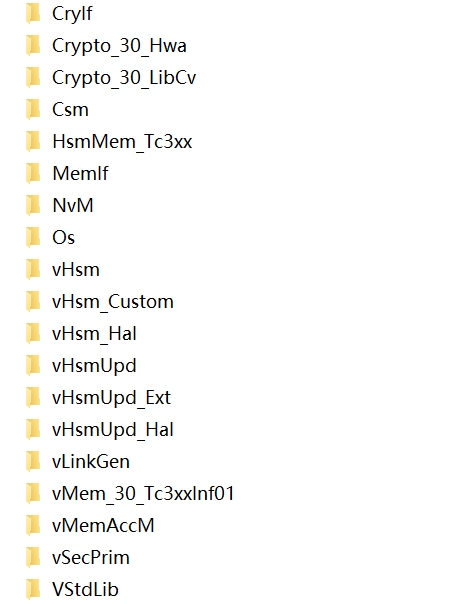
首先,这款芯片支持的算法还挺全的,像RSA、AES这些常见的加密算法都支持,还能做签名生成和验证,CMAC生成和验证等等。HsmBootloader则是HSM芯片的专用引导程序,确保HSM芯片在启动时加载的固件是安全的。总的来说,英飞凌的HSM芯片在汽车电子网络安全方面表现非常不错,支持的算法和功能都很全面。首先验证引导程序的签名,如果验证通过就加载引导程序,否则系统停止运行。支持算法:RSA,A
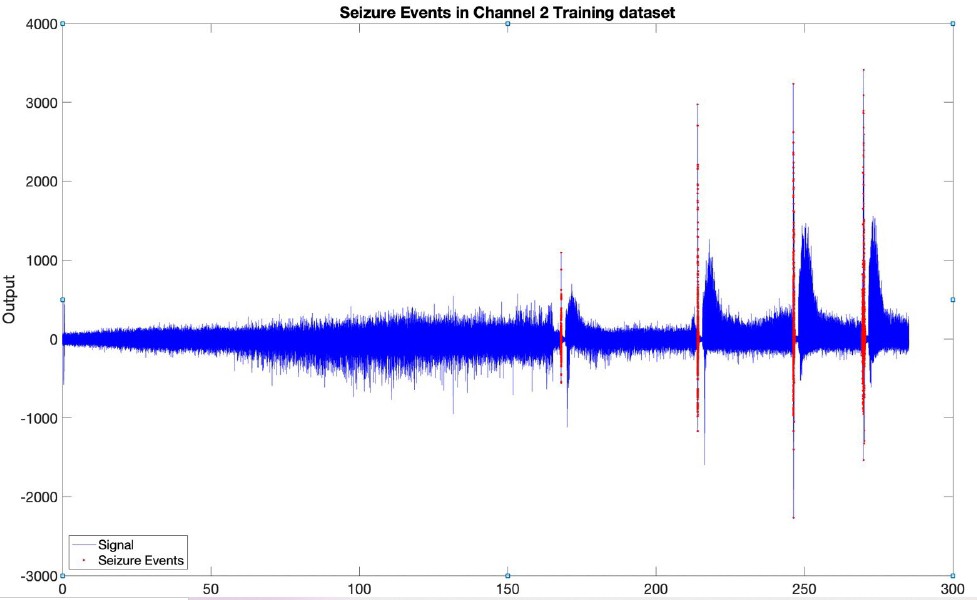
这里给大家提个醒哈,阅读作品简介很重要,因为不同编程语言实现起来思路和代码会有很大差别,咱这次是基于 MATLAB 的。而且建议有一定 Python 或 Matlab 基础的同学或工程师来研究这个代码,毕竟深度学习相关的东西,有一定基础上手会更快。咱这次算法的运行环境是 MATLAB R2021b ,在这个版本上执行基于深度学习(LSTM)的癫痫发作自动检测。运行这个检测程序有一定要求哈,需要 G
这个项目最魔幻的是——当我把通勤路线导入系统,它居然建议我绕道穿过殡仪馆旁边的小路,比日常路线快了13分钟。有意思的是,在实测中发现路段间存在"蝴蝶效应"——某个路口拥堵会在18分钟后传导到3公里外的立交桥。实测时发现个反直觉的现象:当所有车都智能避堵时,反而会制造新的拥堵点。最后来个骚操作:用OpenCV可视化拥堵传播,红色浪潮在路网上蔓延的样子堪比丧尸围城。2、采用A*/Dijkstra实现车
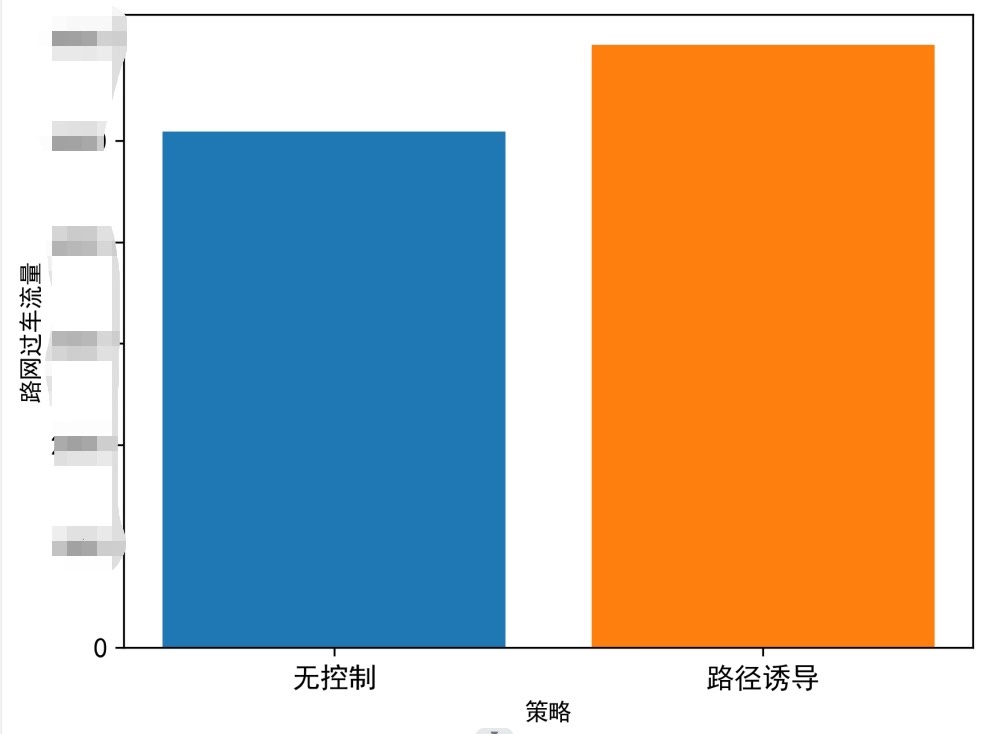
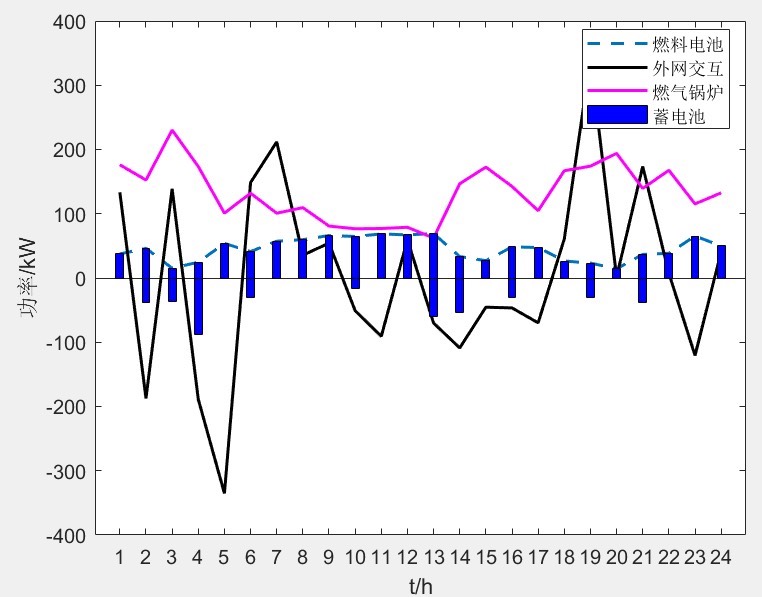
这不,最近我一直在研究热电联供型微网系统的优化问题,今天就和大家聊聊我的研究心得,以及如何用代码来实现这个系统的经济运行优化。由风电机组、光伏电池、燃料电池、余热锅炉、燃气锅炉、蓄电池以及热电负荷构成的热电联供型微网系统,考虑风电、光伏功率以及热电负荷的随机性,应用机会约束规划理论建立经济运行优化模型,由风电机组、光伏电池、燃料电池、余热锅炉、燃气锅炉、蓄电池以及热电负荷构成的热电联供型微网系统,
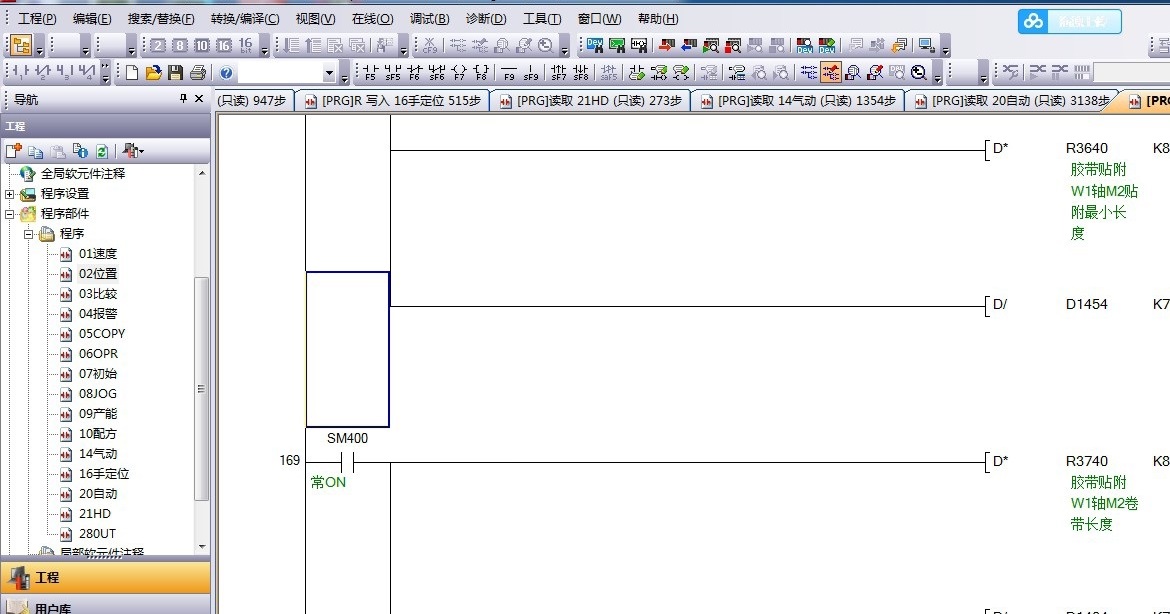
这里有个细节值得注意:D100寄存器存放的是脉冲频率,K500对应的是500Hz的初始搜索速度。三菱Q系列plc,11轴标准程序,包含轴回零,相对定位,绝对定位,程序有两轴直线插补,一共有五组插补,整个程序的模块都有,程序框架符合广大编程人员思维,只要弄明白这个程序,一般的项目都不会无从下手,参照这个,做项目不再难,拿着就可用,思路清晰易懂,有触摸屏与电路图。这个程序里最实用的就是轴控逻辑的模块化
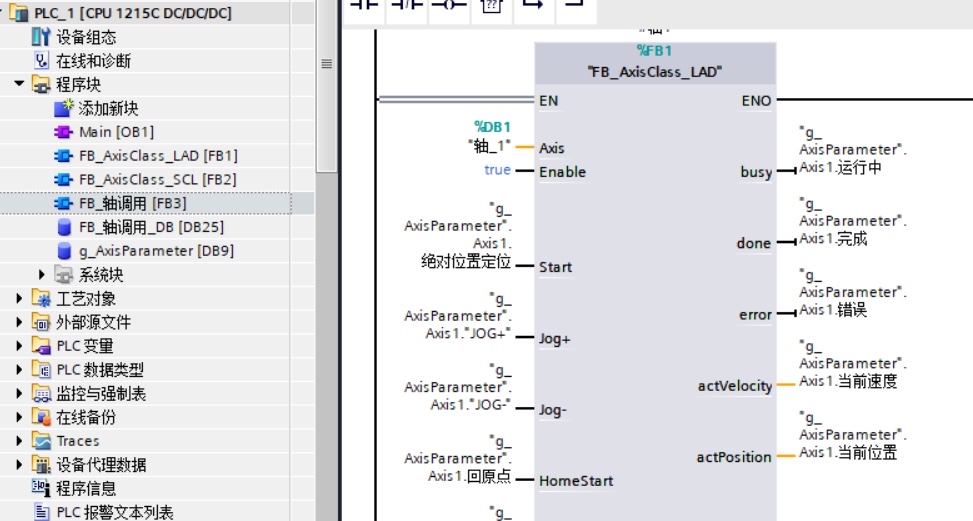
西门子1200伺服步进FB块程序为自动化项目开发者提供了一个高效、稳定且通用的解决方案。无论是新手快速搭建项目,还是老手优化现有系统,这套程序都值得一试。希望大家在实际项目中运用它,创造出更多优秀的自动化应用成果。西门子1200伺服步进FB块程序程序内含两个FB,一个是scl写的,一个是梯形图,可以多轴多次调用,中文注释详细。真实可用,经过在专用设备真实调试运行,可以直接应用到实际项目中,提供,包
这个时间差在7km/h的泊车速度下意味着30cm的位置误差,足够让车辆刮蹭到旁边生锈的消防栓。停车场入口的钢索减速带发出沉闷的撞击声,特斯拉Model 3的超声波雷达阵列正在高频振动。后来引入B样条曲线平滑后,控制指令的曲率连续性提升了23%,但代价是增加了8%的CPU占用率。这段代码展示了多传感器决策的权衡艺术。当自动泊车系统终于完美入库时,仪表盘上跳动的驻车标志背后,是无数个这样在现实物理世界
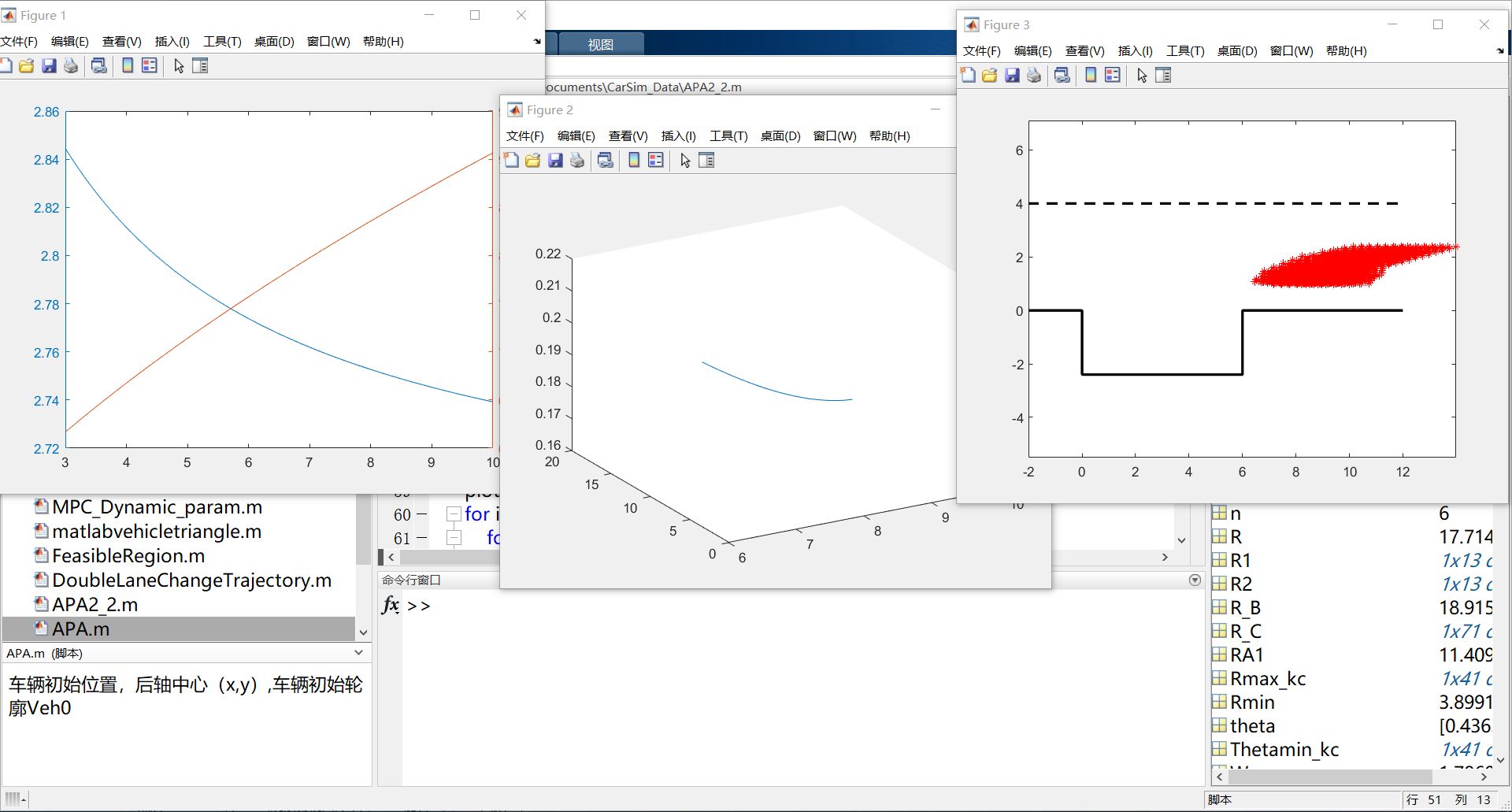
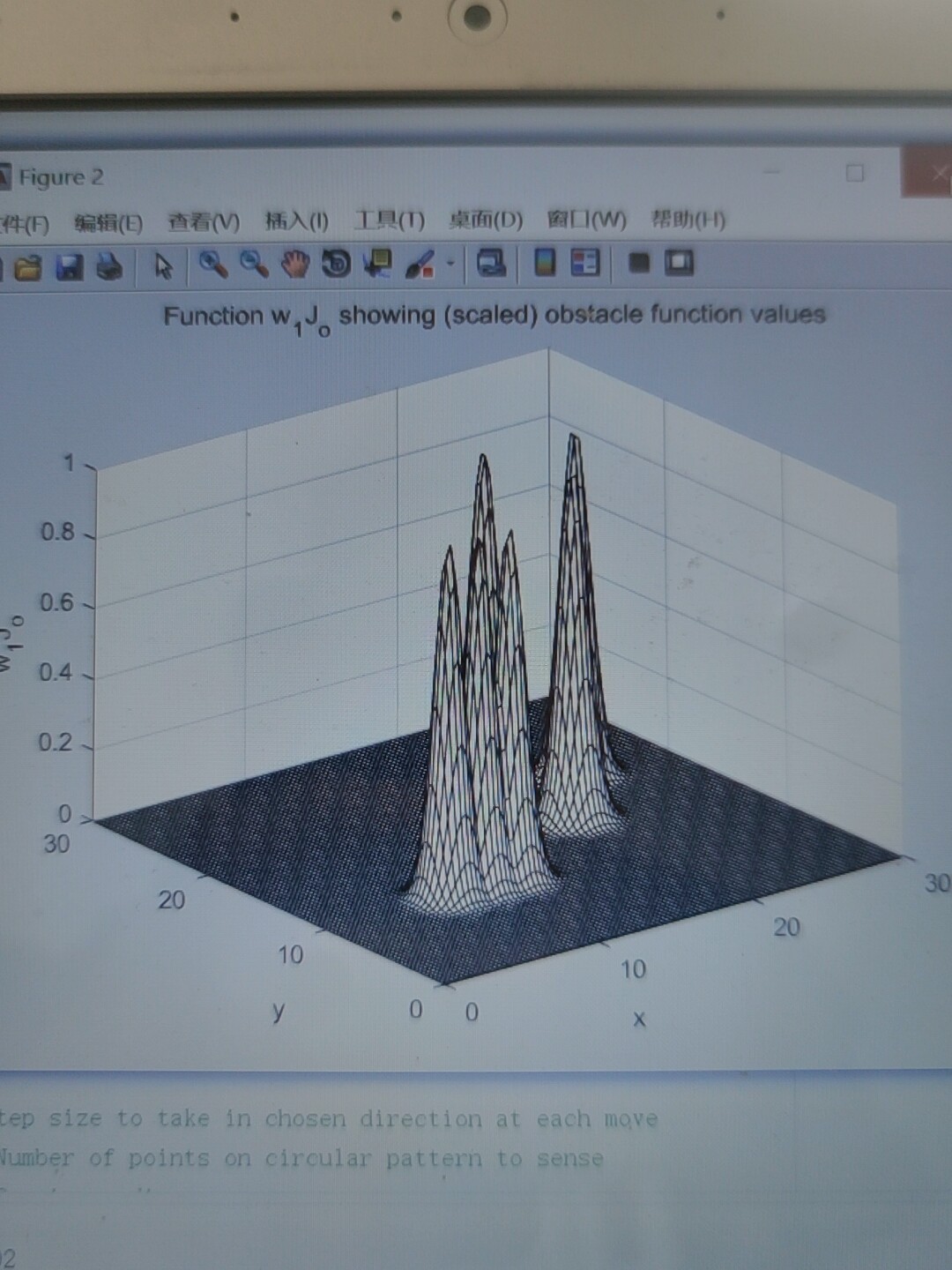
无人车轨迹规划,利用代价函数求解最优轨迹,matlab程序这个程序是一个用于车辆导航和避障的示例。它使用了一种基于目标函数和障碍函数的规划方法,通过计算不同方向上的函数值来选择最佳移动方向,并模拟车辆在真实环境中移动的过程。程序的主要功能是模拟车辆在给定的区域内避开障碍物并达到目标位置。它使用了一些参数来控制规划过程,如步长、感知点数量、感知半径等。程序通过计算障碍函数和目标函数的值来评估每个感知
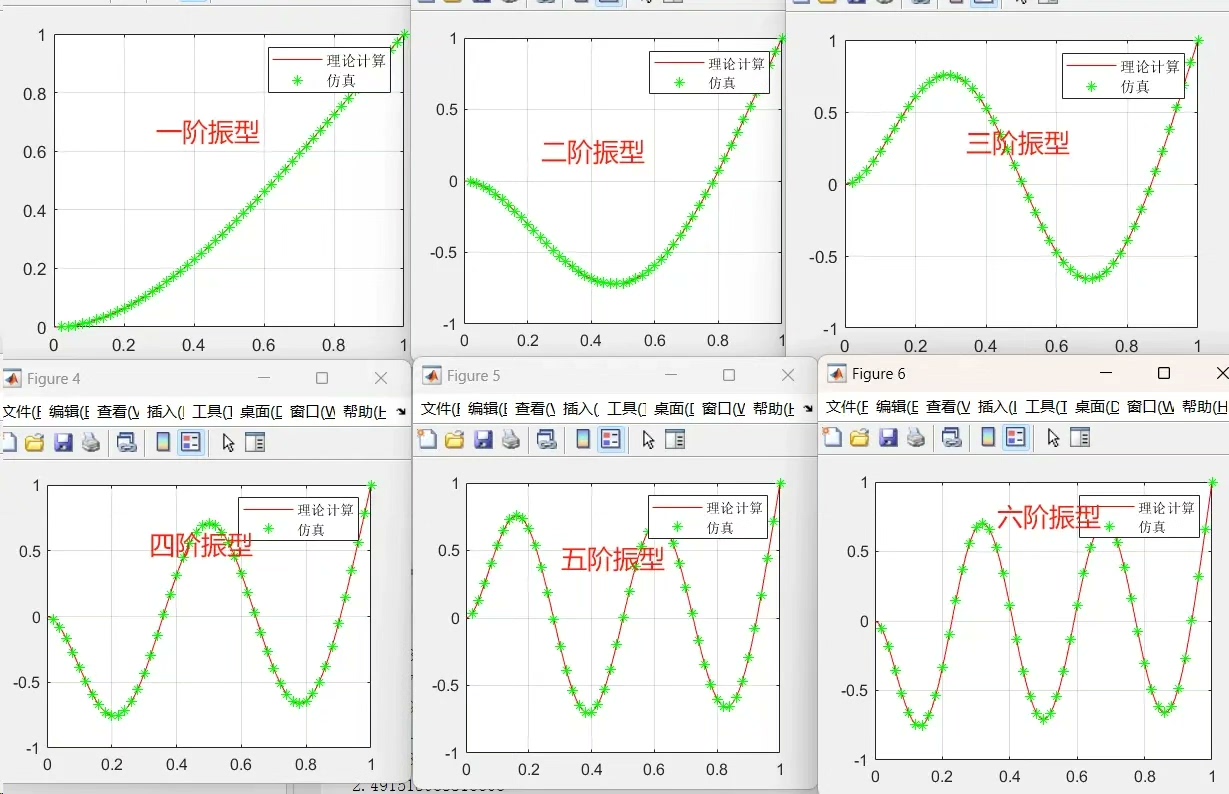
就拿一根2米长的钢梁来说吧,截面尺寸20x50mm,弹性模量210GPa,密度7850kg/m³,左端固定。搞有限元就像搭乐高,单元矩阵是积木,总装规则是说明书,边界条件就是最后那几颗关键卡扣——扣错了整个模型就崩啦!第一阶是典型的单波腹振动,第二阶出现节点,第三阶有两个节点——这和理论振型完全吻合。这里用了经典的欧拉梁单元刚度矩阵,质量矩阵选择一致质量矩阵而不是集中质量,更贴近连续体特性。短边固