




- @u011570052
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
大家好,我是小米。最近 AI 大模型火得一塌糊涂,但说实话,在嵌入式场景里,跑个 YOLO 做目标检测才是真正的刚需——工业质检、缺陷检测、机器人视觉、智能安防……这些场景用不上 GPT,但非常需要一个能实时跑得动的目标检测模型。RK3588 内置了 6TOPS 算力的 NPU,纸面参数很漂亮。但实际跑起来能跑多快?能同时跑几路?选什么模型最划算?这篇文章,我用三块 RK3588 开发板、四个 Y
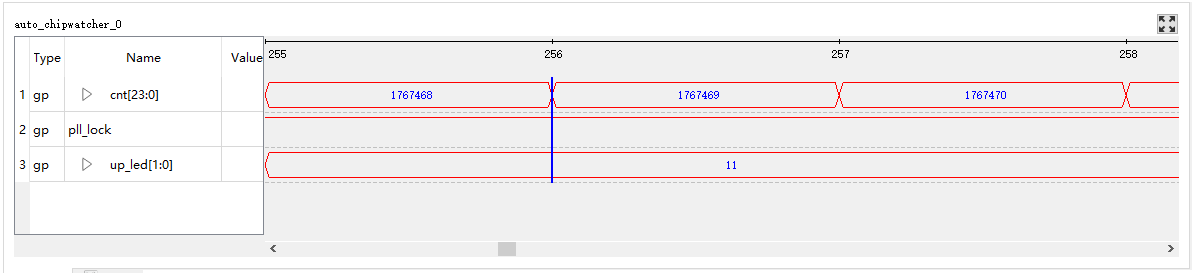
本节旨在教程如何使用ChipWatcher在线逻辑分析仪来监测电路内部信号的变化情况。通过ChipWatcher,用户可以添加多个信号,并设置采样时钟、采样深度、触发条件等参数,然后重新编译、下载和触发,即可查看指定条件下的信号变化情况。该工具能够提高开发效率并发现潜在的设计问题。
本文主要介绍了如何在FPGA项目中新建代码文件、添加PLL IP核、调用PLL、添加约束文件、工程编译以及下载演示的步骤。通过新建FPGA代码文件并添加PLL IP核,可以实现对FPGA的功能扩展和调用。同时,通过添加约束文件,可以对FPGA的引脚和时序进行约束,确保项目的正确性和稳定性。最后,通过工程编译和下载演示,可以将设计好的FPGA项目烧录到实际硬件中并进行验证。整个流程清晰明了,有助于开

摘要:本文详细介绍了基于瑞芯微RK3588芯片和YOLOv5模型的实时目标检测实现方案。重点讲解了RKNN开发环境搭建、YOLOv5模型转换及MIPI摄像头适配等关键技术环节。通过米联客RK3588开发板内置的6TOPS算力NPU,结合IMX415 4K摄像头,实现了30fps的高清实时检测。该方案具有低功耗、高性能特点,为边缘计算场景下的AI视觉应用提供了完整的开发流程和优化方案,适用于智能监控

摘要:本文详细介绍了基于瑞芯微RK3588芯片和YOLOv5模型的实时目标检测实现方案。重点讲解了RKNN开发环境搭建、YOLOv5模型转换及MIPI摄像头适配等关键技术环节。通过米联客RK3588开发板内置的6TOPS算力NPU,结合IMX415 4K摄像头,实现了30fps的高清实时检测。该方案具有低功耗、高性能特点,为边缘计算场景下的AI视觉应用提供了完整的开发流程和优化方案,适用于智能监控
本文详细分析了U-Boot启动流程及bootz启动Linux内核的过程。U-Boot作为嵌入式系统引导加载器,其启动过程分为多个阶段:从处理器上电加载引导程序,初始化基础硬件,到重定位至内存高端地址。关键函数包括reset、_main、board_init_f和board_init_r等,完成硬件初始化、内存管理、环境变量设置等工作。
本文详细介绍了在米联客F3P-CZ02-7020开发板(基于Xilinx Zynq-7020 SoC)上实现WiFi(AIC8800D80)和4G(移远Quectel)两种无线通信方案的完整配置流程。WiFi方案通过USB接口接入,支持WPA2加密,需特别注意驱动中的CONFIG_USB_RX_REASSEMBLE配置以确保稳定性;4G方案则通过GobiNet驱动和quectel-CM拨号工具实现
本文主要介绍了如何在FPGA项目中新建代码文件、添加PLL IP核、调用PLL、添加约束文件、工程编译以及下载演示的步骤。通过新建FPGA代码文件并添加PLL IP核,可以实现对FPGA的功能扩展和调用。同时,通过添加约束文件,可以对FPGA的引脚和时序进行约束,确保项目的正确性和稳定性。最后,通过工程编译和下载演示,可以将设计好的FPGA项目烧录到实际硬件中并进行验证。整个流程清晰明了,有助于开
XILINX官方默认的lwip bsp驱动暂时不支持RTL8211网口芯片,在使用该网口的时候需要自己手动修改库文件以支持该芯片,不同版本工具之间的修改方式大同小异,这边仅以Vitis 2019.2为例。PS端网口以米联客MZU07A board为例:Step1:首先,找到vitis ide安装目录下的LWIP库的路径,将其拷贝一份放到工程目录下:Step2:修改lwip211_v1_1\data
XILINX官方默认的lwip bsp驱动暂时不支持RTL8211网口芯片,在使用该网口的时候需要自己手动修改库文件以支持该芯片,不同版本工具之间的修改方式大同小异,这边仅以Vitis 2019.2为例。PS端网口以米联客MZU07A board为例:Step1:首先,找到vitis ide安装目录下的LWIP库的路径,将其拷贝一份放到工程目录下:Step2:修改lwip211_v1_1\data