




- @t18438605018
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1.报错信息:a previous installation of Qt Visual Studio Add-in was detected.原因分析:在安装VS的qt插件时,提示以上报错信息,即:检测到,先前有一个qt插件安装。原因是我第一次安装时,把安装程序意外关闭了,也就是安装了一半2.解决办法在注册表中删除该插件的相关注册信息。方法:运行:调出注册表,编辑——>查找 ,输入vsadd
1.conda创建虚拟环境(可选)conda create -n pytorch python=3.8更多细节,可参考博客2.激活虚拟环境(可选)conda activate pytorch3.安装opencv-pythonpip install opencv-python==4.5.1.18注:不带版本号的话,默认安装最新版。带版本号的话一定要确定有此版本,否则找不到该版本。更过细节,可看ope
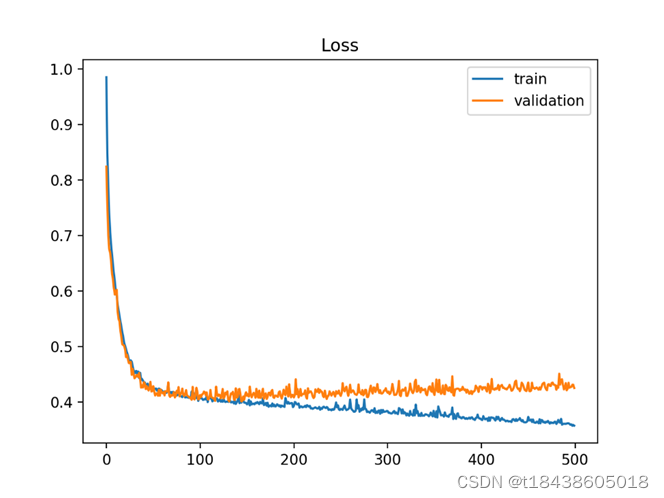
文章目录 前言1. 改模型框架2.数据处理3.超参数对模型训练的影响3.1 学习率对模型训练时的影响3.2 批处理大小对模型训练时的影响3.3 epoch对模型训练时的影响3.4 如何判断模型收敛3.5模型过拟合时怎么办?
通过数据增强,可以达到扩充数据集的目的。对一副图片,做相应的变换,可以达到扩充图像的目的。使用keras下的相关图像处理工具包进行实现。
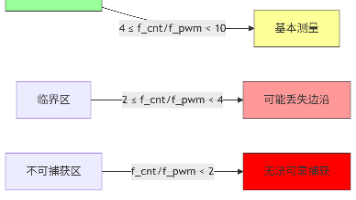
本文分析了定时器捕获PWM脉冲的条件与频率关系,探讨了奈奎斯特采样定理在PWM测量中的应用。通过实例计算说明定时器时钟频率、预分频值与输入信号频率的约束关系,并提出参数配置算法、临界频率处理技术和超高频处理方案。针对低频PWM和高噪声环境等特殊场景,给出了具体的软件处理方法,包括利用溢出中断计算低频信号周期、自适应滤波器调整等技术,为嵌入式系统中的精确PWM测量提供了系统性的解决方案。
笔者近期做一个嵌入式项目,要使用国产芯片,根据需求,选用了GD32F407VG芯片。STM32系列开发板,有正点原子,野火等配置了详细的例程。遗憾的是,只有野火仅支持了一款GD32H759芯片(M7内核),并没有GD32F407芯片。继续查找相关厂家,有一些小厂家有做GD系列的开发板,并配备了相应的例程,但大多数都是基于标准库,hal库并不完备(甚至GD32的厂家兆易创新本身也只有F3xx系列以下

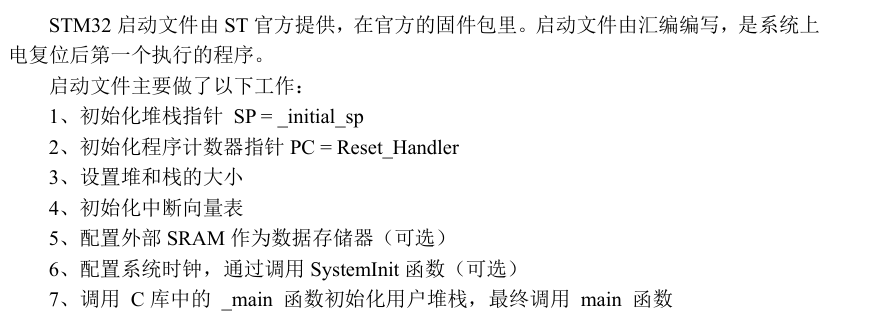
启动文件,即复位后,首先执行的文件。我们可以想象一下,程序如何去执行?首先,得有编译后的二进制文件。其次,得有执行指令的硬件,对嵌入式来说就是处理器MCU 最后,我们知道程序执行需要堆栈,而且是从程序计数器PC中取得将要执行的下一条指令的地址的。因此,在程序执行前,应当初始化栈顶指针,初始化程序计数器。还需要哪些东西呢?时钟是需要的吧,因此需要初始化时钟。中断向量表是不是也要初始化呢?需要的,如果
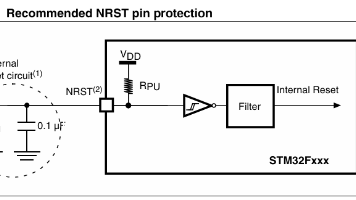
摘要:本文详细讲解了单片机的三种复位类型(系统复位、电源复位和备份域复位),重点分析了系统复位的五种触发条件及实现原理。其中详细介绍了NRST引脚外部复位的电路设计要点,包括上电复位和手动复位实现方式,并阐述了复位后的硬件行为流程,包括寄存器初始化、启动介质选择和复位向量执行等关键步骤。文章还简要提及了通过软件触发复位的操作方法,并指出所有复位类型均可通过RCC_CSR寄存器进行状态查询。
通过数据增强,可以达到扩充数据集的目的。对一副图片,做相应的变换,可以达到扩充图像的目的。使用keras下的相关图像处理工具包进行实现。
启动文件,即复位后,首先执行的文件。我们可以想象一下,程序如何去执行?首先,得有编译后的二进制文件。其次,得有执行指令的硬件,对嵌入式来说就是处理器MCU 最后,我们知道程序执行需要堆栈,而且是从程序计数器PC中取得将要执行的下一条指令的地址的。因此,在程序执行前,应当初始化栈顶指针,初始化程序计数器。还需要哪些东西呢?时钟是需要的吧,因此需要初始化时钟。中断向量表是不是也要初始化呢?需要的,如果