




- @sy243772901
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
参数鲁棒性排第三的是第三种方案,超局部模型方案,这种方案性能较为均衡,没有比较明显的劣势,但是也没有突出的优势;第一种方案的参数鲁棒性最低,因为表格中的变化率是通过电机参数计算的,因此在电机参数发生变化时,这个表格不一定准确。并且指出了模型预测控制比较关键的问题——参数依赖性问题,原文是这样的:一种具有强参数鲁棒性的模型预测控制(MPC)在实际应用中是很有需求的。在整个控制过程中,ARX预测系统状
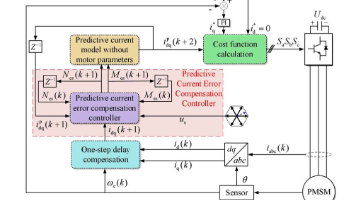
摘要:文章研究了永磁同步电机强鲁棒预测控制算法,重点分析了电阻参数在不同工况下的影响。通过推导证明电阻在低频大电流工况下不可忽略,提出了基于预测电流误差补偿的参数辨识方法。核心创新在于设计了一个包含预测误差和参数偏差的代价函数,通过偏导数推导构建递推方程,实现对电感参数的在线辨识。该方法类似于磁链观测器思想,通过梯度方程动态调整参数。仿真验证表明算法能有效辨识电感参数,调节量化因子Hm可优化辨识效
摘要: 针对永磁同步电机控制中电感参数变化对性能的影响,本文提出基于最小二乘法的在线电感参数辨识方法。传统磁链免疫型DPCC虽能规避磁链参数干扰,但电感与电阻参数仍制约控制精度。通过建立电压方程线性模型,采用递推最小二乘法(RLS)实时更新电感估计值,实现动态参数校正。该方法以误差平方和最小化为优化目标,通过弹簧系统物理类比解释其能量最小化本质。仿真验证表明,参数辨识启动后0.1秒内电感估计收敛,
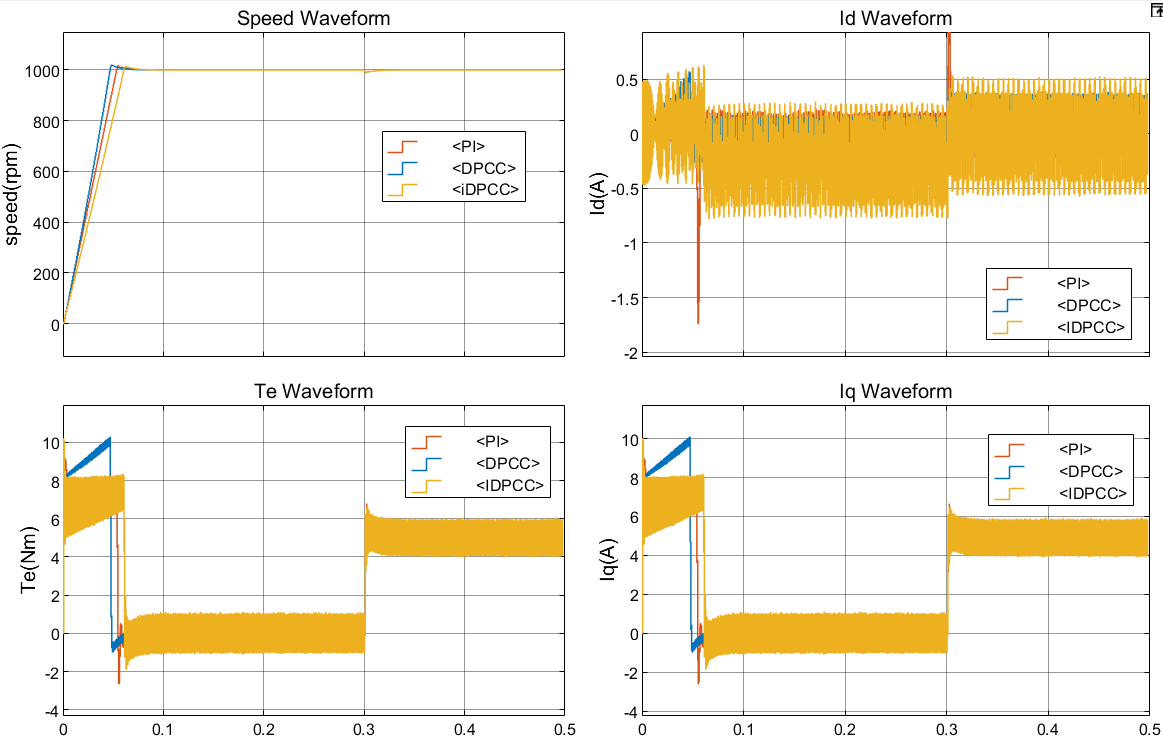
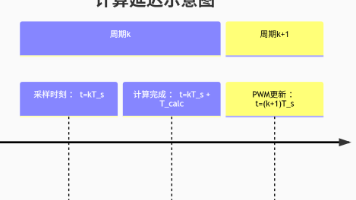
摘要:本文探讨了无差拍模型预测电流控制(DB-MPCC)在永磁同步电机控制中的应用。相比传统PI控制,DB-MPCC通过离散化模型和直接电压计算,实现了更快响应(1-2控制周期内跟踪)、更低计算量和固定开关频率优势。文章详细分析了数字控制系统的"一拍延迟"问题成因,推导了电流预测和电压计算的数学模型,并通过仿真验证了DB-MPCC在电流跟踪速度上较PI调节器提升40%的性能优势
1、简写MRAS参考模型和可调模型参考模型和可调模型方程:简写为如下形式:参考模型:可调模型:定义广义误差为,将上述两个方程做差可以得到如下误差方程。2、改写为标准前向环节将上式改写为标准前向环节,方便对于Popov超稳定理论的分析。因为Popov超稳定理论规定了以下两个条件:线性定常环节传递矩阵必须为严格的正实矩阵。非线性时变反馈环节必须满足Popov积分不等式,即改写为标准前向环节后的误差方程
1、无速度控制策略的优势电机交流调速系统中,电机转速和位置信息的准确获取是一个十分关键的环节。在高性能异步电机控制系统中,一般通过在转子轴上安装机械式传感器来获得电机的速度和位置信息,以实现高性能的转速和位置闭环控制。传统的检测电机转速和位置多采用光电编码器或者旋转变压器等机械传感器。这些机械传感器在实际应用中存在许多问题:高精度、速度快的传感器成本较高;机械传感器安装在电机轴上,可能出现同轴度的
本篇对另外一种无速度传感器控制策略做详解——模型参考自适应MRAS无速度控制策略。1 MRAS简介MRAS的主要思想:构建两个具有相同物理意义的输出量的模型,其中以不含有位置参数的电机方程作为参考模型,而将待估计参数的方程作为可调模型。利用两个模型输出量的差值构建适当的自适应律来实时调节可调模型的参数,使得可调模型的输出跟踪参考模型的输出。MRAS结构图如图所示:在MRAS转速估计中,系统和转速的
对于观测器的设计,一般会选取一个数学模型进行参照。而对于PMSM而言,一般会根据电机的电压模型或者电流模型来设计观测器。由于电机的负载状态会影响扩展反电动势的大小,而电机在高速重载的情况下,定子电流将会有较大的变化。因此,对于估算扩展反电动势的滑模观测器,按照PMSM的电流模型来设计会更合理。
上一篇文章,写到了滑模观测器的设计过程,此过程过后可以得到滑模输出的扩展反电动势。按照反正切函数的原理,只需要对扩展反电动势进行求解反正切即可。如下所示:但是事实上,直接通过滑模观测器输出的扩展反电动势是无法得到准确的实际位置信号的。其原因是:滑模观测器时刻在滑模面上下抖振,输出的扩展反电动势包含不连续的高频切换信号,直接求取结果抖振严重因此,为了提取连续的扩展反电动势估计值,通常需要外加一个低通
1、高频注入法前面已经讲过了一种无速度传感器实现的方法——滑模观测器法。在开始一个新的位置估计策略之前,我们先聊一聊这个方法本身的特点。从前面对滑模的讲述可知,滑模观测器法是通过构造一个滑模面,然后设计滑模控制律,进而得到扩展反电动势,实现位置信息的观测。但这个过程其实涉及到一个很重要的问题,滑模在零低速情况下能够有效吗?滑模观测器设计的根本目标是得到扩展反电动势,从而得到位置信息。电机在零速情况