




- @sinat_16643223
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
这里说插上烧好镜像的SD卡上电就可以直接用了转载自:https://mp.weixin.qq.com/s/Lhm9FFctl7BShdnBwmCV4wJetson-Xavier-NX使用教程原创 lance计算机视觉算法工程师2月18日1.介绍microSD卡插槽用于主存储40针扩展接头微型USB端口千兆以太网端口USB 3.1 A型端口(x4)HDMI输出端口DisplayPort连接器.
转载自:https://blog.csdn.net/weixin_41469272/article/details/117919845?utm_medium=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-1.essearch_pc_relevant&depth_1-utm_source=di
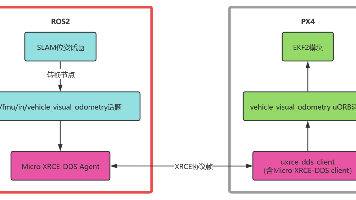
本文主要是介绍在ROS2下如何通过micro XRCE-DDS实现PX4基于SLAM位姿的定位,同时结合px4代码进行了详细的分析,基于micro XRCE-DDS把/fmu/in/vehicle_visual_odometry话题桥接到PX4内部的方法,相比于向mavros发送/mavros/vision_pose/pose话题的方法,个人觉得它的优点有两个,一个可以在SLAM运行时动态调整协方
转载自:基于ros框架和opencv颜色捕捉功能,实现机器人充当守门员_彭艺的博客-CSDN博客实现条件:1.有一个ROS框架的麦克纳姆轮智能机器人(可左右横向移动的机器人);2.能够发布摄像头信息;3.对opencv的基本API有一定的了解。算法思路:1.订阅摄像头信息,用cv_bridge转换为可处理的opencv图;2.通过opencv的颜色过滤功能,实时捕捉“足球”的位置;3…根据足球位置
阿木wifi数传插telem1口,板载计算机插telem2口,tfmini插telem4口,是因为PX4用户指南就是这么弄的!https://docs.px4.io/master/zh/assembly/quick_start_pixhawk4.htmlhttps://docs.px4.io/master/zh/peripherals/mavlink_peripherals.htmlpixhawk
用外置显卡跑深度学习的一些注意事项 华硕的显卡坞并不是说只能在华硕电脑上用,只要有雷电3接口的一般是可以用的。这个我专门问了客服的。 搜外置显卡弄深度学习建议用google搜,搜出的结果比百度多多了。 搜到的结果大多数macbook通过雷电口外接显卡跑深度学习的。 他们建议接外置显示器,原因如下:http://www.rethink.fun/index.php/...
这是 ACfly A9的原理图我看acfly的原理图里面就没有稳压模块啊,应该是给飞控供电就已经是5V了!!!!!!对的所以飞控板子不需要考虑这块暂时,我当时自己组装飞机,都买个一个输出5V的稳压模块来专门给飞控供电的。...
这里有完整的MVSNet论文的翻译这里看到部分翻译这个可以看看 基于平面扫描的多视角立体(MVS)深度学习综述-北大Zhu Qingtian 2021感觉把一些基础都讲到了,也合区3D视觉工坊里的MVSNET课程里的内容很相似。
(基于深度学习的MVS)现在发觉深度估计可以分为单目深度估计,双目深度估计(立体匹配),多目立体匹配(MVS)。而MVSNET属于多目深度估计,似乎不是双目深度估计,双目深度估计似乎也有一些专门的深度学习方法。现在感觉可以感受到一点,就是不管是单目深度估计还是双目深度估计还是多目立体匹配 都基本全面转向深度学习了。我看到对MVS概括得最多而且简单的一句话是:寻找空间中具有图像一致性的点。很多地方都
用神锁离线版进行github的2FA验证,可以参考。