




- @shuoyueqishilove
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
需求有个朋友需要我帮忙写个matlab脚本读取100个txt文档的实验数据,这些文档的结构相同,分为四列,从第一列到第四列依次是时间、位置、速度、加速度。读取完数据之后需要对数据进行处理,具体的处理方式是:提取以0.002为采样周期的数据,分类存储起来。文件内容是这样的:技术难点技术难点在于,这些文件中的数据是从一个软件中仿真得到的,由于采用的是变步长仿真,因此采样时间不统一,很难采用对...
最近在开源社区下载了一份使用opencv在python环境中实现车道线检测的代码,研究了一下,终于有点儿看懂了,寻思着写下来,免得以后忘记了。这个车道线检测项目原本是优达学城里无人驾驶课程中的第一个上手的项目,源码应该是一个外国人写的吧,反正大家传来传去,我觉得挺有意思。说说这个代码实现车道线检测的过程吧。(1)对视频流进行处理主要使用了moviepy.editor中的VideoFil...

最近在开源社区下载了一份使用opencv在python环境中实现车道线检测的代码,研究了一下,终于有点儿看懂了,寻思着写下来,免得以后忘记了。这个车道线检测项目原本是优达学城里无人驾驶课程中的第一个上手的项目,源码应该是一个外国人写的吧,反正大家传来传去,我觉得挺有意思。说说这个代码实现车道线检测的过程吧。(1)对视频流进行处理主要使用了moviepy.editor中的VideoFil...
优先掌握链表、数组、动态规划类题目,再扩展至树和设计题。每类题目需至少掌握两种解法(如递归/迭代、暴力/优化),并注重代码规范(边界处理、变量命名)。

jetson nano官方最高支持的ubuntu版本是18.04,这版本有点低,不支持ROS2 Foxy安装,ROS2 Foxy需要ubuntu版本为20.04及以上,支持Jetson Nano的ubuntu20.04-LTS镜像如下:Qengineering/Jetson-Nano-Ubuntu-20-image: Jetson Nano with Ubuntu 20.04 image下载镜像之
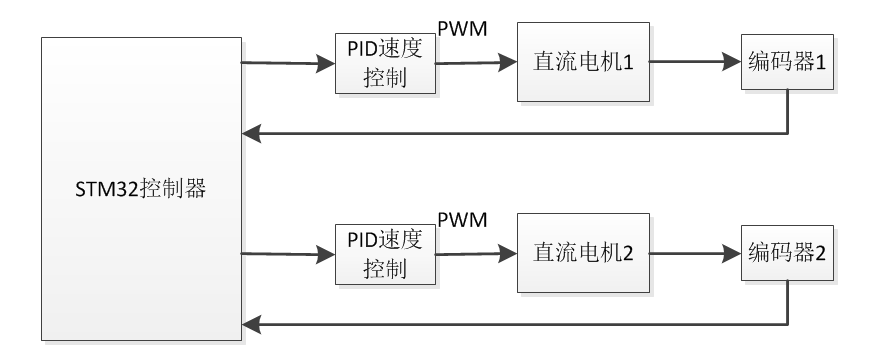
手头上有一个差分驱动的小车,使用两个直流电机驱动,要实现小车的在给定速度下运动,完成直线行驶,转向,加速,刹车等复杂运动。使用的电机是12v供电的直流电机,带编码器反馈,这样就可以采用闭环速度控制,这里电机使用PWM驱动,速度控制框图如下:由以上框图可知,STM32通过定时器模块输出PWM波来控制两个直流电机的转动,通过改变PWM占空比的大小可以改变电机的转速,由于我们的控制目标是实现...
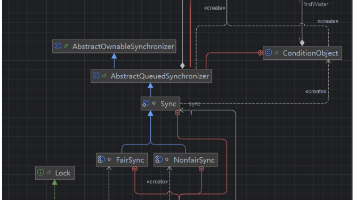
ReentrantLock内部原理简析 ReentrantLock通过Sync抽象类及其子类FairSync(公平锁)和NonfairSync(非公平锁)实现锁机制,底层基于AQS(AbstractQueuedSynchronizer)框架。AQS使用volatile修饰的state变量表示锁状态,通过双向链表维护等待线程队列。Node节点包含waitStatus、前后指针和线程信息等字段。关键操
CAPL编程监视总线的情况获取时间点等待特定报文设置总线背景
jetson nano官方最高支持的ubuntu版本是18.04,这版本有点低,不支持ROS2 Foxy安装,ROS2 Foxy需要ubuntu版本为20.04及以上,支持Jetson Nano的ubuntu20.04-LTS镜像如下:Qengineering/Jetson-Nano-Ubuntu-20-image: Jetson Nano with Ubuntu 20.04 image下载镜像之