




- @shakehands2012
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
引言:在科技界,AI和机器人技术已经成为了近几年最火热的话题。在2025年初的春节联欢晚会上,宇树科技的人形机器人给全国的观众带来了一次玩手绢的视觉盛宴,引起了众多网友的热烈讨论。那么,除了丢手绢这种对机器人上肢运动功能要求较高的玩法,作为与人类形体最接近的机器人,人形机器人是否可以完成更多、更具有挑战的任务呢?比如打篮球、跳舞、跑酷等等,这些运动对于人形机器人的全身运动性能要求更高,尤其是全身运
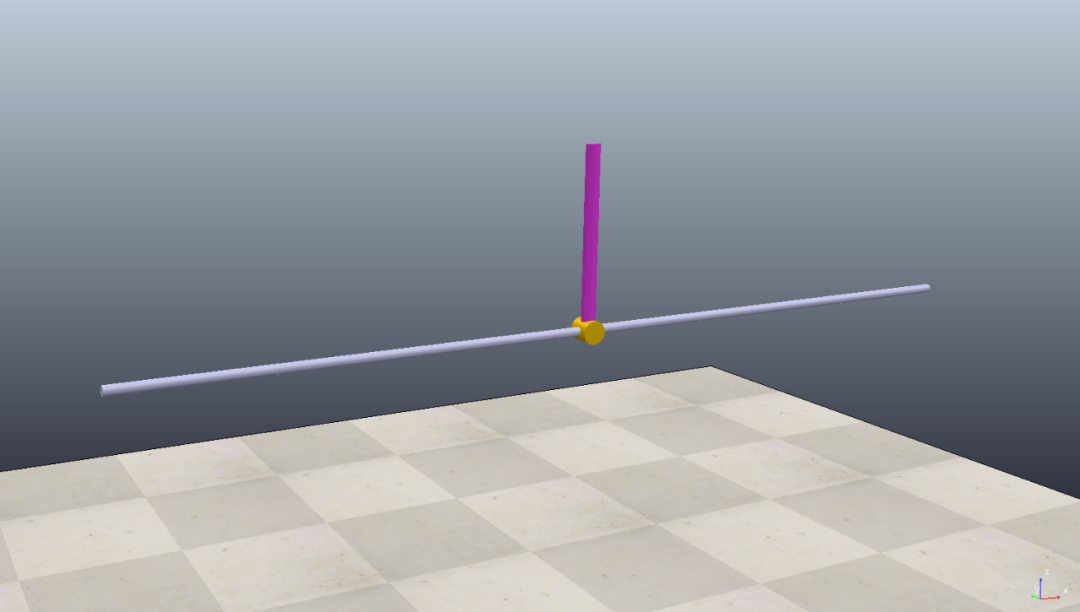
前言本文将介绍CoppeliaSim与Gym框架结合来构建强化学习环境的基本方法,通过一个强化学习的经典控制例子cartpole来讲述如何在Gym的框架下,构建基于CoppeliaSim的...
基本信息论文标题:Experiment-free exoskeleton assistance via learning in simulation发表期刊:Nature发表时间:2024年6月12日访问链接论文:https://www.nature.com/articles/s41586-024-07382-4?fromPaywallRec=true代码:https://github.com..
【基本信息】论文标题:Intelligent upper-limb exoskeleton integrated with soft bioelectronics and deep learning for intention-driven augmentation发表期刊:npj Flexible Electronics发表时间:2024年2月10日【访问链接】论文链接:https://www.
前言本文将介绍CoppeliaSim与Gym框架结合来构建强化学习环境的基本方法,通过一个强化学习的经典控制例子cartpole来讲述如何在Gym的框架下,构建基于CoppeliaSim的...
基本信息论文标题:Experiment-free exoskeleton assistance via learning in simulation发表期刊:Nature发表时间:2024年6月12日访问链接论文:https://www.nature.com/articles/s41586-024-07382-4?fromPaywallRec=true代码:https://github.com..
前言本文将介绍CoppeliaSim与Gym框架结合来构建强化学习环境的基本方法,通过一个强化学习的经典控制例子cartpole来讲述如何在Gym的框架下,构建基于CoppeliaSim的...
基本信息论文标题:Experiment-free exoskeleton assistance via learning in simulation发表期刊:Nature发表时间:2024年6月12日访问链接论文:https://www.nature.com/articles/s41586-024-07382-4?fromPaywallRec=true代码:https://github.com..
【基本信息】论文标题:Intelligent upper-limb exoskeleton integrated with soft bioelectronics and deep learning for intention-driven augmentation发表期刊:npj Flexible Electronics发表时间:2024年2月10日【访问链接】论文链接:https://www.
【基本信息】论文标题:Iterative Learning of Human Behavior for Adaptive Gait Pattern Adjustment of a Powered Exoskeleton发表期刊:IEEE Transactions on Robotics (TRO)发表时间:2022年2月7日【访问链接】论文:https://ieeexplore.ieee.org/